PKE – Praktyczny Kurs Elektroniki (23) Uniwersalny timer oraz theremin
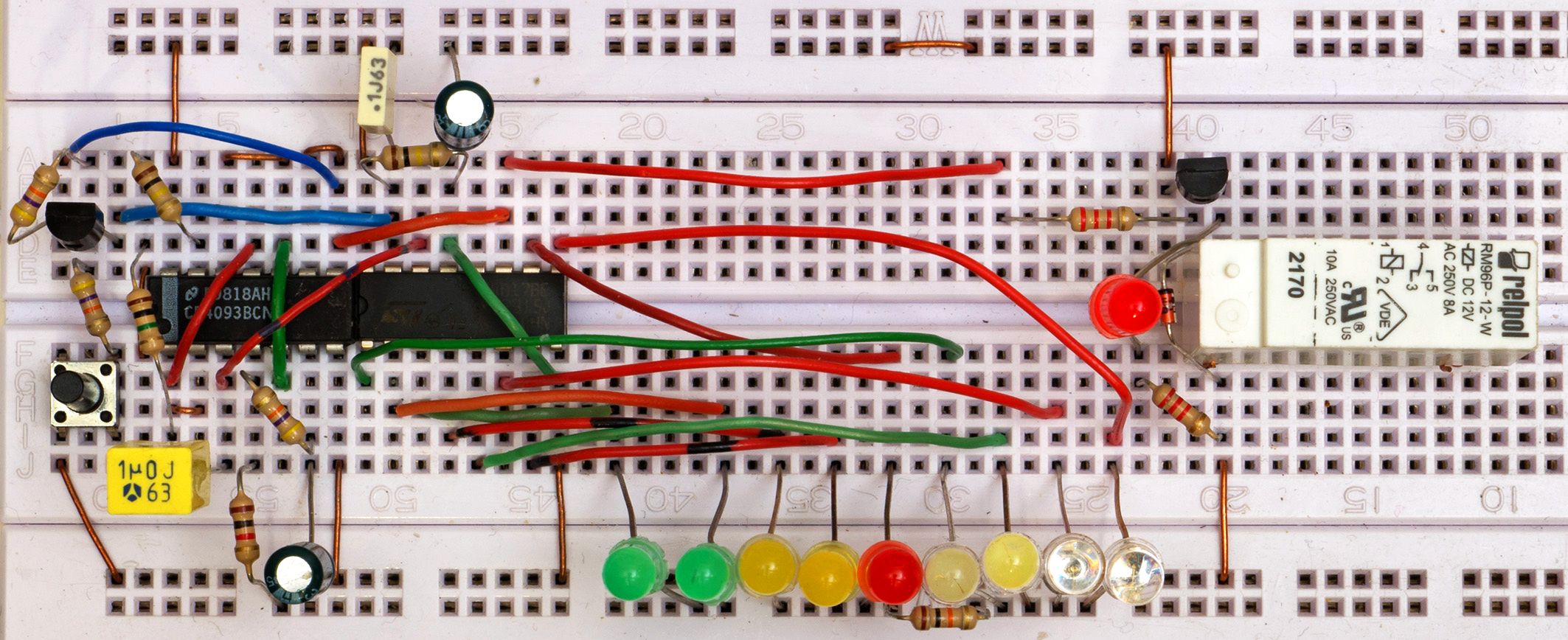
Fotografia wstępna pokazuje uniwersalny układ czasowy. Może się wydawać, że taki uniwersalny timer to temat banalny i niepraktyczny. W rzeczywistości każdy elektronik wcześniej czy później potrzebuje układu czasowego, za pomocą którego albo uruchomi jakieś inne urządzenie na pewien czas, albo też o pewien czas opóźni jego włączenie.
Nasz uniwersalny układ czasowy ma nieskomplikowaną budowę, a realizuje dodatkowe pożyteczne funkcje. Zawiera linijkę diod LED, która pokazuje upływ czasu, co w wielu zastosowaniach jest bardzo pożądane.
Po pierwsze, do wyboru mamy dwa główne tryby pracy:
1 – po naciśnięciu przycisku lub po włączeniu napięcia zasilania układ wytwarza impuls, który włącza przekaźnik na określony czas,
2 – po włączeniu zasilania przekaźnik zostanie włączony z określonym opóźnieniem.
Po drugie mamy do wyboru wersje:
A – z możliwością dowolnego przedłużania czasu za pomocą przycisku
B – bez możliwości przedłużania czasu.
W wersji podstawowej czasy opóźnienia mogą sięgać do kilku minut, natomiast w wersji z dodatkowym licznikiem czasy mogą sięgać wielu godzin.
Opis układu dla „zaawansowanych”
Schemat uniwersalnego timera pokazany jest na rysunku A. Elementy R5, C2 zerują licznik po włączeniu zasilania, co jest bardzo ważne, żeby układ zaczynał pracę zawsze od „punktu zerowego”.

Rysunek A
Gdy licznik zostaje wyzerowany, zaświeca się zielona dioda LED1. Na wyjściu Q9 (nóżka 11) panuje stan niski, a w punkcie X stan wysoki, co otwiera T2 i uruchamia przekaźnik i diodę LED10 oraz umożliwia pracę generatora na bramce U1B i pulsowanie diody LED1, a potem następnych diod. Stan wysoki w punkcie X umożliwia też pracę głównego generatora z bramkami U1A, U1D, przez co licznik U2 zlicza kolejne impulsy i zaświeca kolejne diody.
Gdy stan wysoki pojawi się na wyjściu Q9 (n. 11) generatory przestają pracować, a przekaźnik REL zostaje wyłączony – jest to stan spoczynku i układ nie pobiera prądu. Naciśniecie przycisku S1 rozpocznie kolejny cykl pracy.
Dołączenie emitera T1 do punktu A powoduje, że podczas odliczania czasu każde naciśniecie przycisku S1 zeruje licznik U2 i przedłuża zliczanie. Dołączenie do punktu B daje układ bez możliwości przedłużania czasu, jak w modelu z fotografii tytułowej.
W spoczynku układ nie pobiera prądu i kondensator filtrujący C4 nie może się rozładować
Gdy układ ma być uruchamiany przez podanie napięcia zasilania, równolegle do kondensatora C4 należy dołączyć zaznaczony szarym kolorem rezystor R11, który zapewni jego rozładowanie do zera, co po ponownym włączeniu zasilania pozwoli obwodowi R5, C2 prawidłowo wyzerować układ.
Poznajemy elementy i układy elektroniczne
W układzie tytułowym wykorzystaliśmy popularny generator dwubramkowy. Trzeba też wiedzieć, że istnieją specjalizowane układy scalone generatorów i przerzutników monostabilnych, w tym najpopularniejszy 555. W rodzinie cyfrowych układów CMOS 4000 mamy uniwersalny timer 4047 oraz kilka podwójnych uniwibratorów: 4098, 4528, 4538, 4548 o bardzo podobnej konstrukcji. We wszystkich odmierzany czas (częstotliwość) wyznacza obwód RC, więc dla uzyskania sensownej dokładności oraz stabilności długoczasowej i termicznej należy użyć kondensatora stałego (foliowego lub ceramicznego C0G), a nie elektrolitycznego. Z uwagi na ograniczoną pojemność kondensatorów stałych, praktycznie nie jest możliwe odmierzanie w ten sposób długich czasów (powyżej minuty). Odmierzany czas można dowolnie zwiększyć, stosując liczniki (dzielniki). W rodzinie CMOS 4000 mamy do dziś popularny układ 4541 – specjalizowany uniwersalny timer z licznikiem do odmierzania nawet bardzo długich czasów. W wielu przypadkach można wykorzystać popularne liczniki dwójkowe: 4020, 4040, a najchętniej stosowany jest 4060, który ma dodatkowy obwód oscylatora. Jeden z tych liczników można byłoby wykorzystać w układzie tytułowego timera by uzyskać dowolnie długie czasy, nawet nawet dni.
Gdy potrzebna jest większa dokładność, wykorzystuje się rezonatory kwarcowe, zwane potocznie kwarcami – fotografia 1.
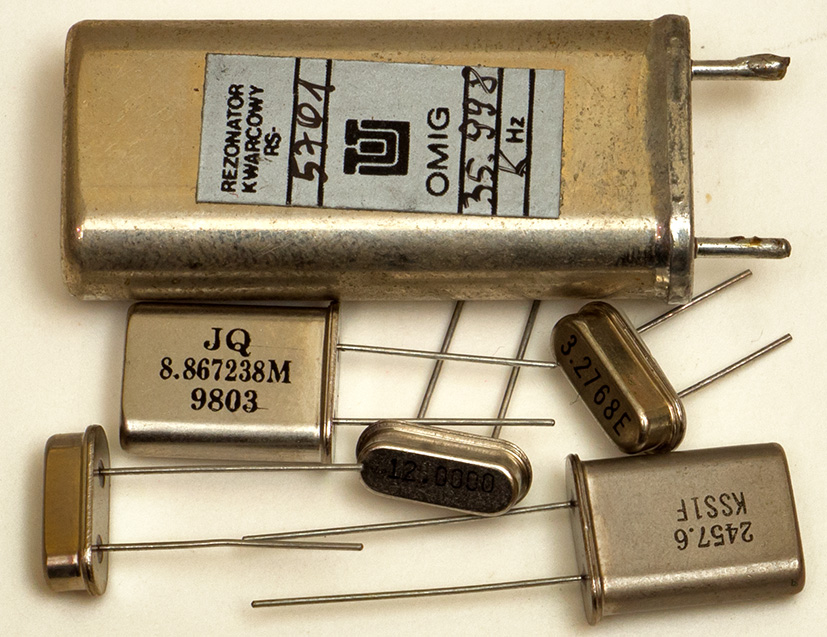
Fotografia 1
Bardzo często stosowany generator kwarcowy na bramce lub inwerterze pokazany jest na rysunku 2.
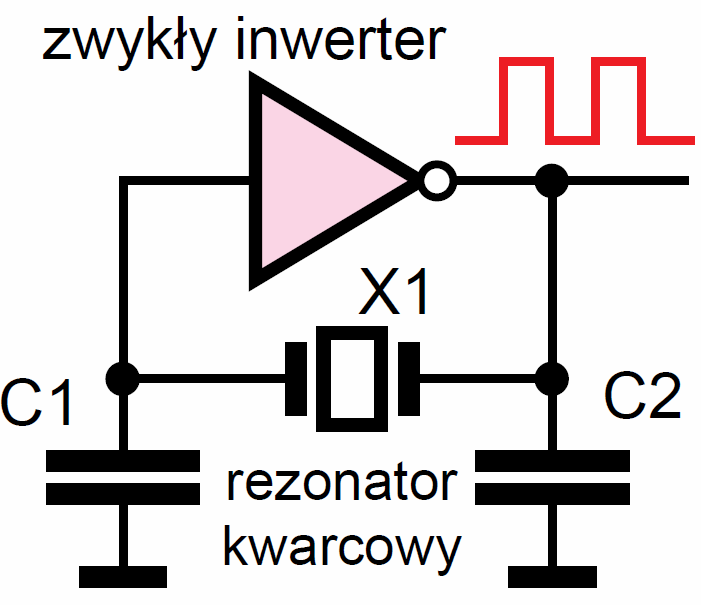
Rysunek 2
Bramki złożone. Oprócz absolutnie podstawowych NOT, AND, OR, NAND, NOR, pożyteczna bywa też bramka realizująca funkcję XOR, inaczej EXOR (EXclusive OR). Łatwo zapamiętać, że dwuwejściowa bramka EXOR jest podobna do bramki OR, tylko przy stanie wysokim na obu wejściach, wyjście ma stan zero (w wielowejściowych bramkach EXOR stan wysoki na wyjściu występuje wtedy, gdy na nieparzystej liczbie wejść panuje stan wysoki). Dostępne są też bramki EXNOR (XNOR) z dodatkowym negatorem ma wyjściu. Rysunek 3 pokazuje symbole bramek EXOR i EXNOR oraz sposób realizacji EXOR z czterech bramek NAND.
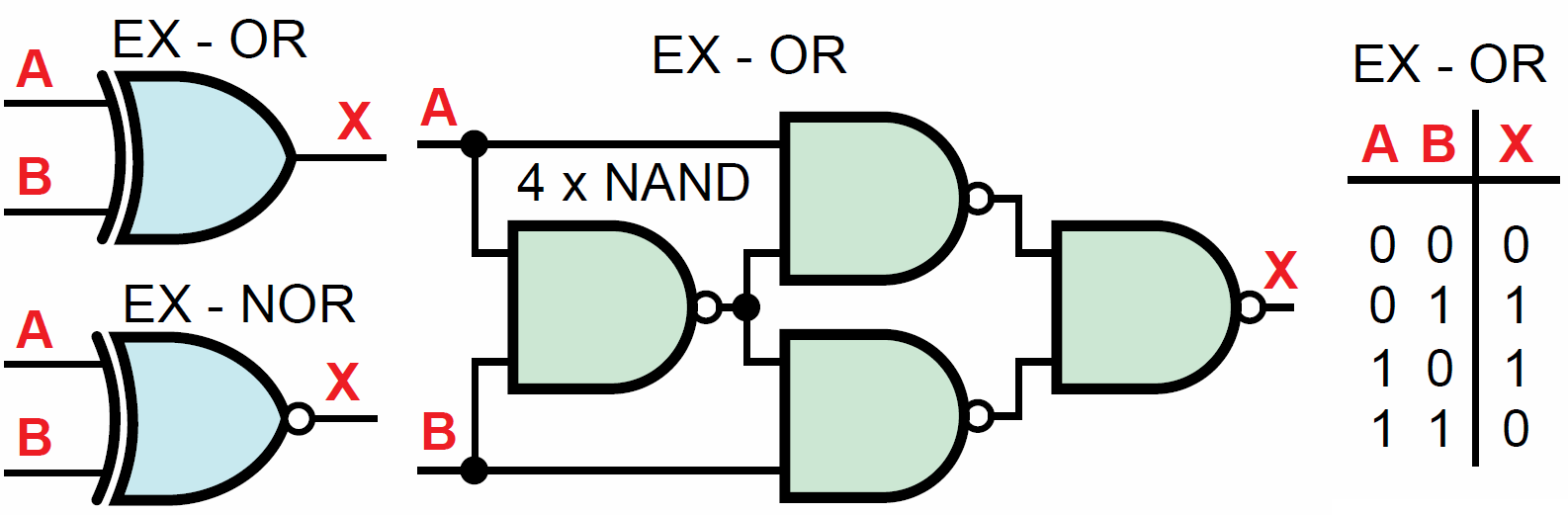
Rysunek 3
W rodzinach CMOS 4000 i 74HC dostępne są liczne bramki, w tym XOR (XNOR). Ciekawostką jest układ CMOS 4048, zawierający 8-wejściową bramkę, której funkcję logiczną można zmieniać za pomocą trzech wyprowadzeń – rysunek 4.
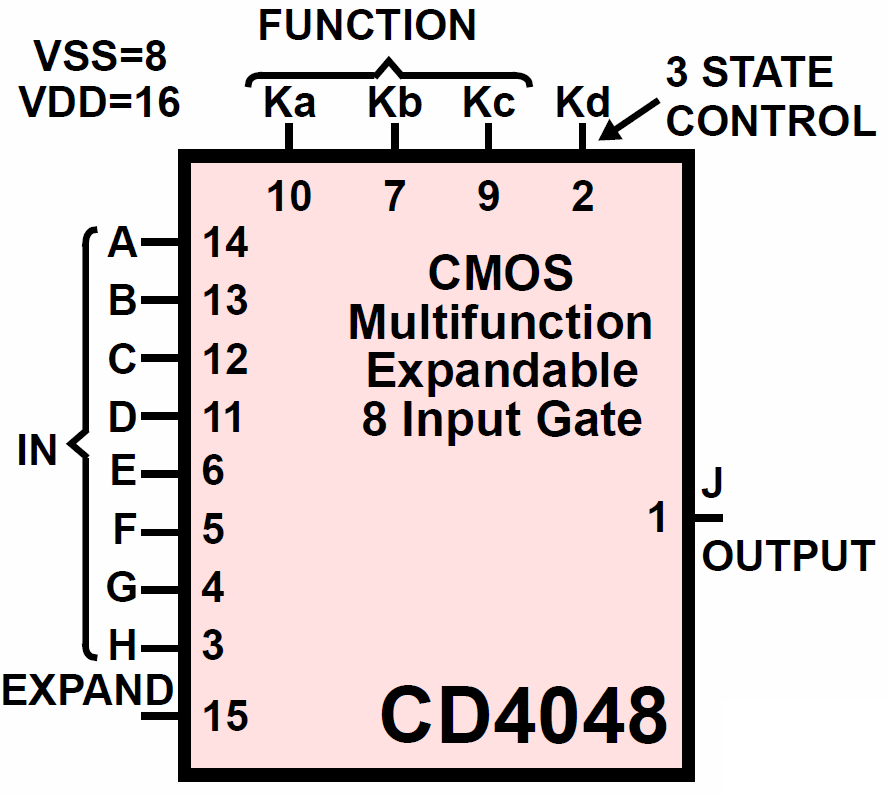
Rysunek 4
W rodzinach 4000 i 74 mamy też wiele różnego rodzaju dekoderów i enkoderów. Rysunek 5 pokazuje budowę dekodera kodu dwójkowego (BCD) na kod 1 z 10 z kostki CMOS 4028.
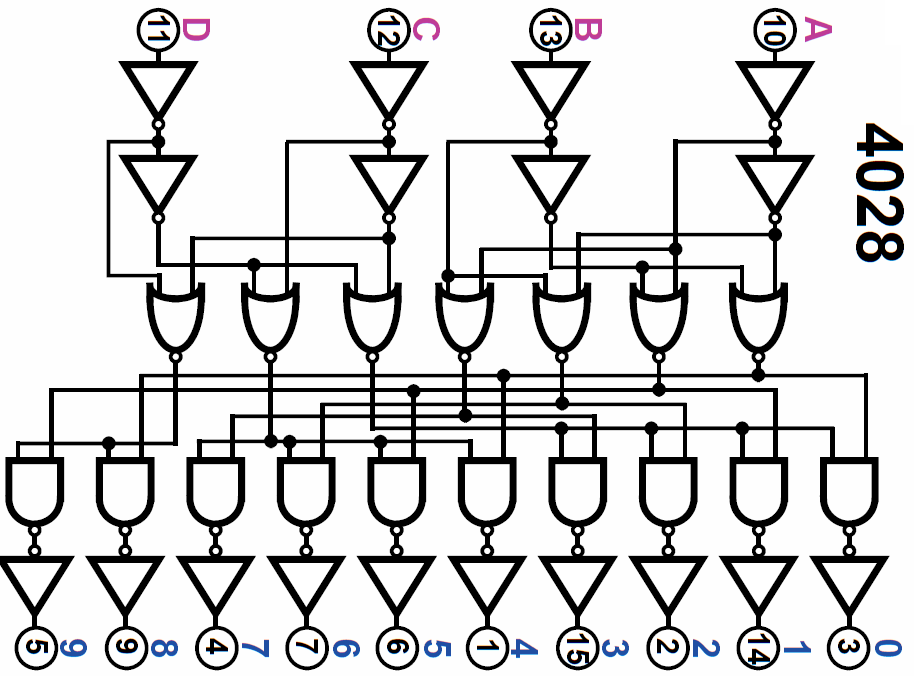
Rysunek 5
Na rysunku 6 masz schemat wewnętrzny bardzo popularnego niegdyś dekodera 7447 kodu BCD na kod sterowania wyświetlaczy 7-segmentowych.

Rysunek 6
Na fotografii 7 pokazane są 7-segmentowe wyświetlacze LED i LCD.
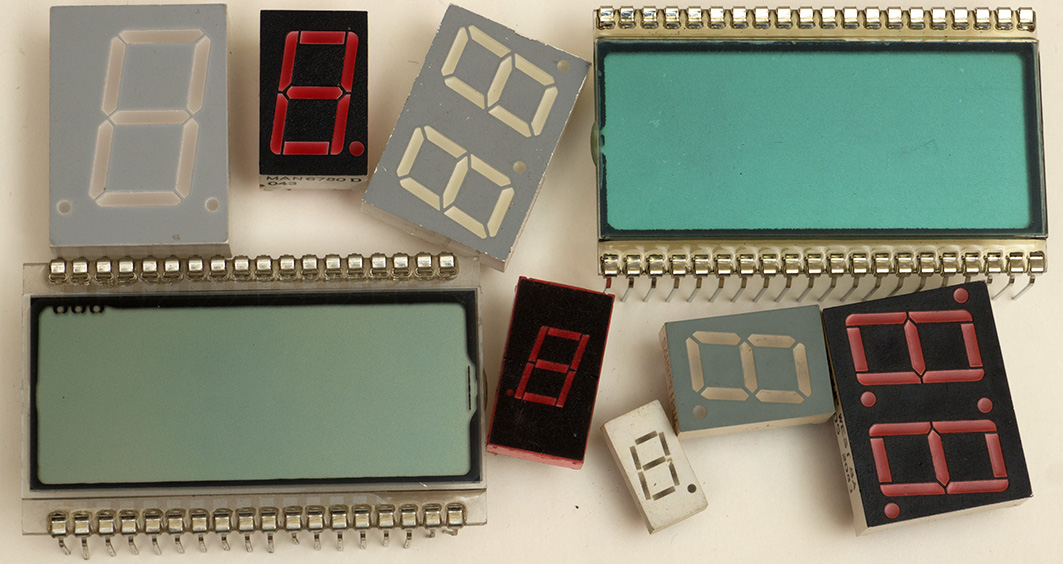
Fotografia 7
Bardzo pożyteczne okazują się multipleksery i demultipleksery, czyli swego rodzaju przełączniki. Proste przykłady pokazuje rysunek 8. Mamy tu dwa wejścia adresowe A1…A0, na które podawana jest liczba dwójkowa z zakresu 0…3 uruchamiająca jedno z wejść/wyjść.
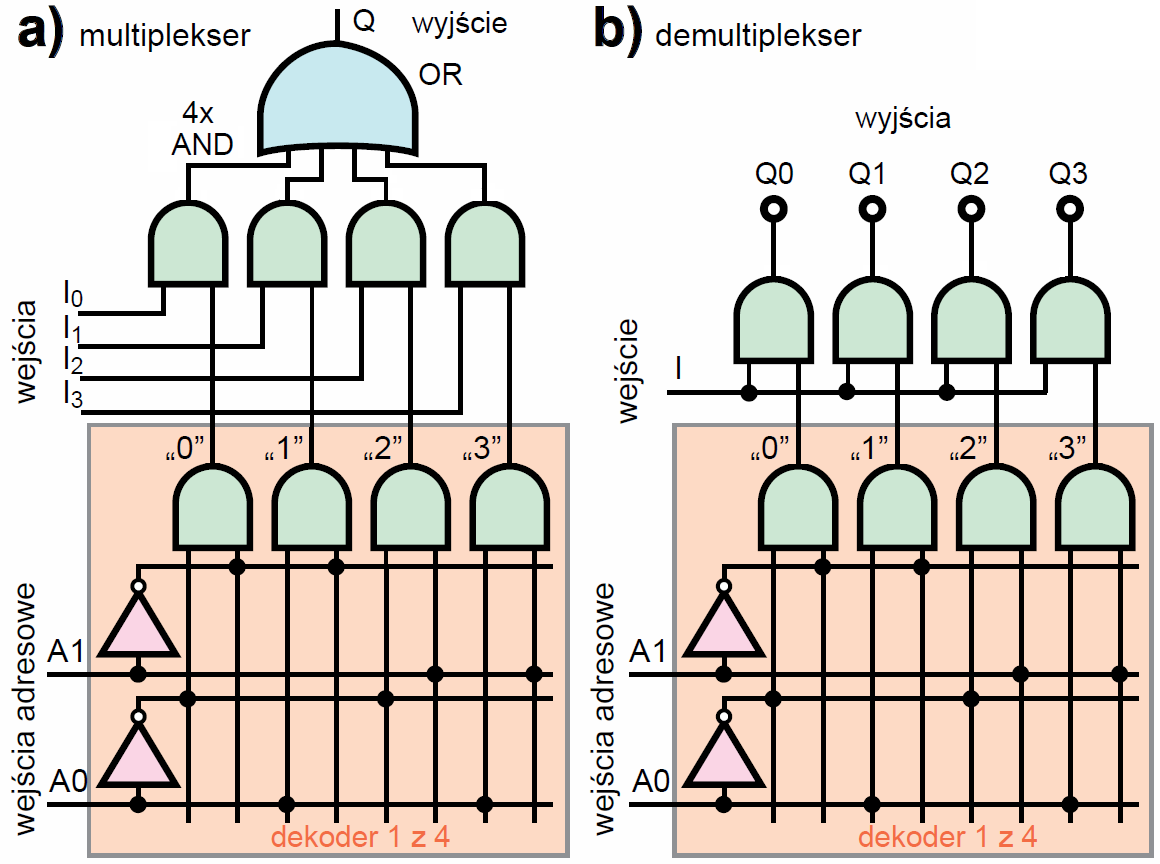
Rysunek 8
Dużo bardziej uniwersalne są tego rodzaju układy z tak zwanymi bramkami transmisyjnymi według rysunku 9. Bramka transmisyjna jest odpowiednikiem sterowanego wyłącznika, elektronicznego przekaźnika. W technologii CMOS można je zrealizować bardzo łatwo, uzyskując przy okazji klucz analogowy załącz/wyłącz, mogący przekazywać sygnały w obu kierunkach.
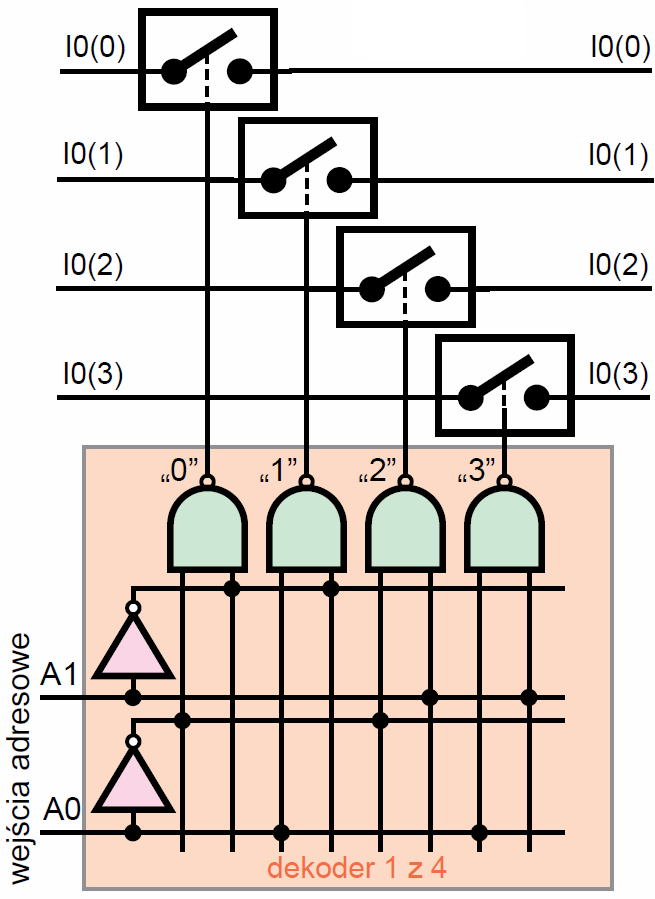
Rysunek 9
Podstawą budowy prostego klucza analogowego są dwa komplementarne tranzystory MOS połączone „równolegle”. Rysunek 10 pokazuje schemat budowy klucza analogowego z kostki 4016 (zastąpionej przez znacznie ulepszony układ 4066).

Rysunek 10
Gdy na wejściu sterującym CONTROL jest stan niski, oba tranzystory klucza (n i p) są zatkane i bramka nie przewodzi – rezystancja między punktami IN/OUT jest ogromna, rzędu wielu megaomów. Stan wysoki na wejściu CONTROL otwiera oba tranzystory – prądy mogą płynąć między punktami IN/OUT w obu kierunkach. Jadnak taki otwarty klucz nie jest jednak doskonały – ma pewną rezystancję szeregową, rzędu kilkudziesięciu do kilkuset omów.
Kostki CMOS 4016 i 4066 zawierają cztery niezależne klucze analogowe. Dostępne są też (de)multipleksery z kluczami analogowymi: szesnastokanałowy 4067, ośmiokanałowy 4051, dwa czterokanałowe 4052 i trzy dwukanałowe w kostce 4053. Te klucze i multipleksery analogowe zasadniczo należą do układów cyfrowych, ale przewidziane są do pracy z sygnałami analogowymi (np. audio) Dlatego kostki 4051, 4052, 4053 oprócz końcówek plusa zasilania (VDD, nóżka 16) i masy (VSS, nóżka 8) mają jeszcze dodatkową końcówkę ujemnego napięcia zasilania (VEE, nóżka 7), którą można albo podłączyć do masy (VSS), albo podać na nią ujemne napięcie zasilania, by multiplekser mógł pracować z sygnałami zmiennymi, także ujemnymi względem masy.
Opracowano wiele innych interesujących układów scalonych. Ponieważ mamy do czynienia z liczbami przedstawionymi w systemie dwójkowym, przydatne są układy, które przeprowadzą na liczbach operacje czysto matematyczne. I tak istnieją komparatory, czyli układy porównujące dwie liczby dwójkowe. Rysunek 11 pokazuje przykładowy schemat prościutkiego komparatora, sprawdzającego, czy dwie czterobitowe liczby są jednakowe.

Rysunek 11
Scalone komparatory, np. CMOS 4585 dodatkowo określają, która liczba jest większa. Istnieją też układy scalone, które są najprawdziwszymi sumatorami. Ale nie sumatorami logicznymi OR, tylko prawdziwymi układami dodającymi dwie liczby dwójkowe. W rodzinie CMOS4000 mamy 4-bitowy sumator liczb BCD (dziesiętny) 4560 oraz 4-bitowy sumator binarny 4008 o schemacie z rysunku 12.
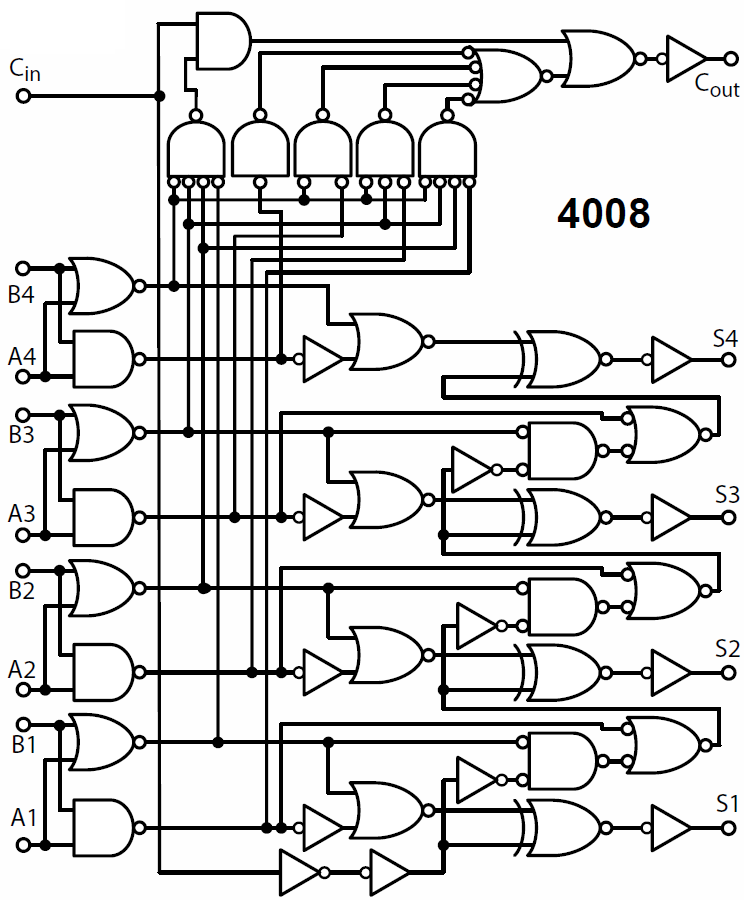
Rysunek 12
Jeżeli wewnętrzny układ byłby jeszcze bardziej skomplikowany, możemy uzyskać uniwersalny układ arytmetyczny (ALU – Arithmetic Logic Unit) według idei z rysunku 13.

Rysunek 13
Zależnie od stanu wejść sterujących, układ może przeprowadzać na liczbach wejściowych dodawanie, odejmowanie, funkcje logiczne AND, OR, XOR, NOT, a także je porównywać. Schemat wewnętrzny ALU z kostki CMOS40181 jest pokazany na rysunku 14.

Rysunek 14
W każdym razie bardziej złożone układy mogą realizować operacje na liczbach. I oto masz też odpowiedź, dlaczego używamy określenia: układy cyfrowe. Do tej pory mówiliśmy o kodzie dwójkowym, który zasadniczo może reprezentować tylko liczby naturalne (0, 1, 2, 3, 4, …). Można też przedstawiać liczby ujemne, np. traktując jeden bit jako znak (minus) co dałoby kod zwany znak-moduł. Jednak w praktyce liczby ujemne lepiej jest przedstawić nieco inaczej, w tak zwanym kodzie uzupełnienia do jedynki albo uzupełnienia do dwóch. Ciąg bitów może też reprezentować liczby ułamkowe. Oprócz różnych kodów liczbowych, w praktyce wykorzystywane są też inne kody.
W praktyce prawie nigdy nie interesuje nas, jaką wewnętrzną budowę mają układy scalone – ważna jest tylko pełniona funkcja i wymagania dotyczące wejść i wyjść. Dlaczego więc przedstawiałem Ci liczne schematy wewnętrzne?
Otóż chcę pokazać, że z prostych bramek można zbudować układy cyfrowe, pełniące dowolnie skomplikowane funkcje.
Naprawdę popularne układy logiczne w postaci układów scalonych z rodziny 74 pojawiły się w roku 1964 – pierwsza była kostka 7400, zawierająca cztery dwuwejściowe bramki NAND. W ciągu kilkudziesięciu lat opracowano setki bardziej skomplikowanych układów cyfrowych. Pojecie o układach z rodziny 74 oraz CMOS400 dają listy na stronach:
http://en.wikipedia.org/wiki/List_of_7400_series_integrated_circuits
http://en.wikipedia.org/wiki/List_of_4000_series_integrated_circuits
Istnieje więc mnóstwo „pojedynczych” układów scalonych realizujących wymienione tu funkcje przerzutników, liczników, rejestrów, dekoderów, multiplekserów. Dawniej były wykorzystywane do realizacji złożonych systemów cyfrowych, w tym także komputerów. Dziś są wykorzystywane coraz rzadziej, ponieważ postęp techniczny umożliwił umieszczenie w jednym układzie scalonym już nie tysięcy, czy milionów, ale miliardów tranzystorów, co pozwala stworzyć miliardy bramek i miliony liczników i rejestrów w jednej małej kostce. Wytworzenie dowolnych struktur pełniących dowolne funkcje logiczne (cyfrowe, obliczeniowe) nie jest dziś żadnym problemem.
Problem natomiast w tym, że każdy odbiorca ma inne potrzeby i potrzebuje układów o innych funkcjach. Duży odbiorca, potrzebujący wielu tysięcy egzemplarzy może zamówić u producenta układ scalony „szyty na miarę”, dokładnie realizujący indywidualne potrzeby odbiorcy, tzw. ASIC (Application Specific Integrated Circuit). Jednak mniejsi odbiorcy, potrzebujący małych serii lub nawet pojedynczych egzemplarzy układów o określonych funkcjach, nie mieliby szans z uwagi na koszty opracowania. Tymczasem zapotrzebowanie na układy „szyte na miarę” było i jest ogromne.
Producenci od dawna starali się dostosować do takich potrzeb. Aktualnie dostępne są mniej i bardziej skomplikowane układy scalone, które są w pewnym sensie „półproduktami”. Mają ogromne możliwości, ale użytkownik musi je zaprogramować do pełnienia potrzebnej mu roli. Rozwój poszedł w dwóch głównych kierunkach, dlatego trzeba wspomnieć o dwóch głównych grupach:
– programowalnych układach logicznych PLD – Programmable Logic Device (PAL, GAL,CPLD, FPGA)
– mikroprocesorach.
W największym uproszczeniu można powiedzieć, że w układzie PLD możemy samodzielnie stworzyć (zaprogramować) dowolny układ logiczny/cyfrowy o możliwościach zależnych tylko od liczby dostępnych w nim elementarnych bramek i przerzutników. Programowanie układów PLD to w sumie jednorazowa konfiguracja elementarnych składników do pełnienia potrzebnej funkcji. Dawniej możliwe było jednorazowe, nieodwracalne skonfigurowanie przez przepalenie niepotrzebnych połączeń i pozostawienie pożądanych. Dziś konfiguracja przebiega na drodze elektronicznej i wykorzystywane są układy PLD, w których raz zapamiętaną konfigurację można później wielokrotnie zmieniać.
Układy PLD mogą zawierać przerzutniki, liczniki, rejestry i inne składniki „pamiętające”, jednak w pierwszym zgrubnym przybliżeniu można sobie wyrażać, że jest to konfigurowalna przez użytkownika sieć mnóstwa bramek.
W ramach kursu PKE nawet nie dotkniemy układów PLD, które są niezbyt popularne wśród hobbystów. Spróbuj tylko zapamiętać: programowanie układów PLD oznacza, że użytkownik konfiguruje sprzęt: realizuje połączenia między zawartymi w układzie bramkami, przerzutnikami, rejestrami, licznikami i innymi blokami, by układ wykonywał potrzebne funkcje. W uproszczeniu można powiedzieć, że użytkownik tworzy specjalizowany układ scalony według swoich potrzeb. Ułatwiają to specjalne programy komputerowe.
Zupełnie czym innym jest programowanie mikroprocesorów. Mikroprocesor ma fabrycznie ustaloną, niezmienną wewnętrzną strukturę i zawiera pewne kluczowe bloki funkcjonalne, w tym pamięć. Programowanie polega na wpisaniu do pamięci rozkazów określających, co i kiedy poszczególne bloki mikroprocesora mają robić. Program to w sumie „przepis na działanie procesora”, składający się z mnóstwa elementarnych rozkazów.
Jest to zupełnie inna koncepcja, niż w przypadku rozwiązań wykorzystanych w PLD oraz w ćwiczeniach cyklu PKE, gdzie realizowaliśmy i realizujemy różne rozwiązania sprzętowe. My w ramach elementarnego kursu PKE doszliśmy wprawdzie do mikroprocesora, ale nie mamy takowego w zestawie, więc go nie wykorzystamy. W tym i następnym wykładzie zbadamy natomiast niektóre tzw. układy peryferyjne, stosowane w mikroprocesorach. Oto kilka ćwiczeń praktycznych.
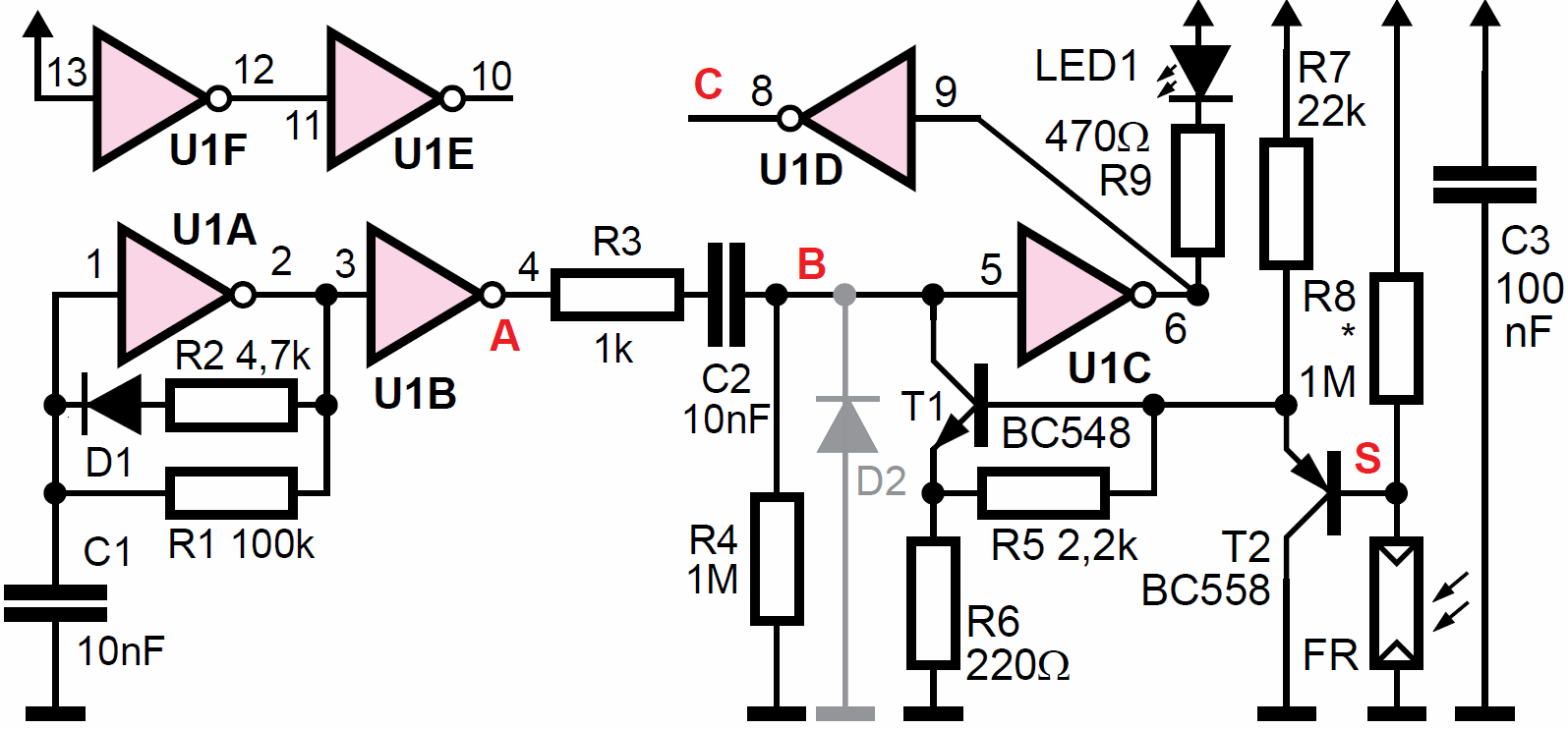
Przypomnijmy, że prosty obwód różniczkujący RC pozwala skracać impulsy. W układzie według rysunku 15 dzięki obecności diody D1 i rezystora R2, w punkcie A występuje przebieg prostokątny o jakiejś częstotliwości f i wypełnieniu ponad 95%. Przebieg taki jest podawany na obwód Rx, Cx, a na wyjściu C otrzymujemy przebieg prostokątny również o częstotliwości f, ale o wypełnieniu zależnym od stałej czasowej RxCx. Wstawiając fotorezystor w miejsce rezystora Rx otrzymujemy możliwość płynnej regulacji współczynnika wypełnienia, a tym samym możemy impulsowo regulować jasność diody LED, bo dzięki dużej częstotliwości pracy i bezwładności ludzkiego oka uzyskujemy płynne zmiany jasności diody.

Rysunek 15
Można uniezależnić się od rozrzutu parametrów fotorezystora w układzie według rysunku 16.
Rysunek 16
Mój model pokazany jest na fotografii 17.

Fotografia 17
Kluczową rolę pełni tu tranzystor T1, który jest sterowanym źródłem prądowym. Tranzystor T2 i rezystor R7 tworzą zwykły wtórnik. Gdy w punkcie S napięcie jest równe zeru, na emiterze T2 występuje napięcie około 0,7V, ale dzięki obecności rezystora R5 tranzystor T1 jest całkowicie zatkany. Wtedy po wystąpieniu dodatniego impulsu w punkcie A kondensator C2 ładuje się tylko przez rezystor R4 – stała czasowa ładowania jest duża, równa R4C2 i układ bez zmian przepuszcza przebieg: na wyjściu C występuje przebieg taki sam, jak w punkcie A. W chwili wystąpienia ujemnego, opadającego zbocza w punkcie A, kondensator C2 szybko rozładowuje się przez diody ochronne na wejściu bramki U1C (przez co dioda D2 nie jest konieczna). Gdy tranzystor T1 przewodzi, ładowanie kondensatora C2 jest szybsze i impulsy w punkcie C są krótsze, niż w punkcie A. Słabiej świeci dioda LED1. Gdy tranzystor T1 przewodzi znaczny prąd, może skrócić czas impulsów aż do zera (skutek obecności rezystancji wyjściowej bramki U1B i rezystora R3). Rezystor R8 pozwala dostosować czułość do użytego fotorezystora.
Właśnie zbudowaliśmy (dość prymitywny) modulator szerokości impulsów czyli modulator PWM – Pulse Width Modulation. Przetwarza on wartość analogową (napięcie) na współczynnik wypełnienia przebiegu prostokątnego, co można łatwo zmierzyć metodami cyfrowymi. Przebieg prostokątny o stałej częstotliwości i zmiennym wypełnieniu można wytworzyć w różny sposób. Rysunek 18a pokazuje ideę rozwiązania analogowego: Przebieg z generatora przebiegu piłokształtnego o częstotliwości fa jest porównywany przez komparator z napięciem stałym, podanym na wejście A. Na wyjściu X otrzymujemy przebieg prostokątny o częstotliwości fa i wypełnieniu wprost proporcjonalnym do napięcia UA.

Rysunek 18
Czysto cyfrowa wersja takiego modulatora PWM pokazana jest na rysunku 18b, gdzie rolę generatora „piły” pełni licznik dwójkowy z generatorem zegarowym, a komparator jest cyfrowy. Mający 16 stanów 4-bitowy licznik dwójkowy stale zlicza impulsy zegarowe o częstotliwości fc, więc kolejno pojawiają się w nim liczby 0, 1, … 14,15, 0, 1, … 14, 15, 0, 1… Cyfrowy komparator na bieżąco porównuje aktualny stan licznika z czterobitową liczbą dwójkową L1, podaną z zewnątrz. Na wyjściu X stan wysoki pojawia się wtedy, gdy stan licznika jest większy od liczby dwójkowej L1. Otrzymujemy tam przebieg prostokątny o częstotliwości fa = fc/16, którego wypełnienie i czas trwania impulsów można zmieniać, zmieniając wartość dwójkowej liczby L1. Przy liczniku i komparatorze 4-bitowym mamy wybór jednej z 16 wartości wypełnienia, przy 8 bitach mamy 256 możliwości, a przy 10 bitach – 1024 możliwości. Dziś w mikroprocesorach powszechnie stosowane są 8- i 10-bitowe układy PWM.
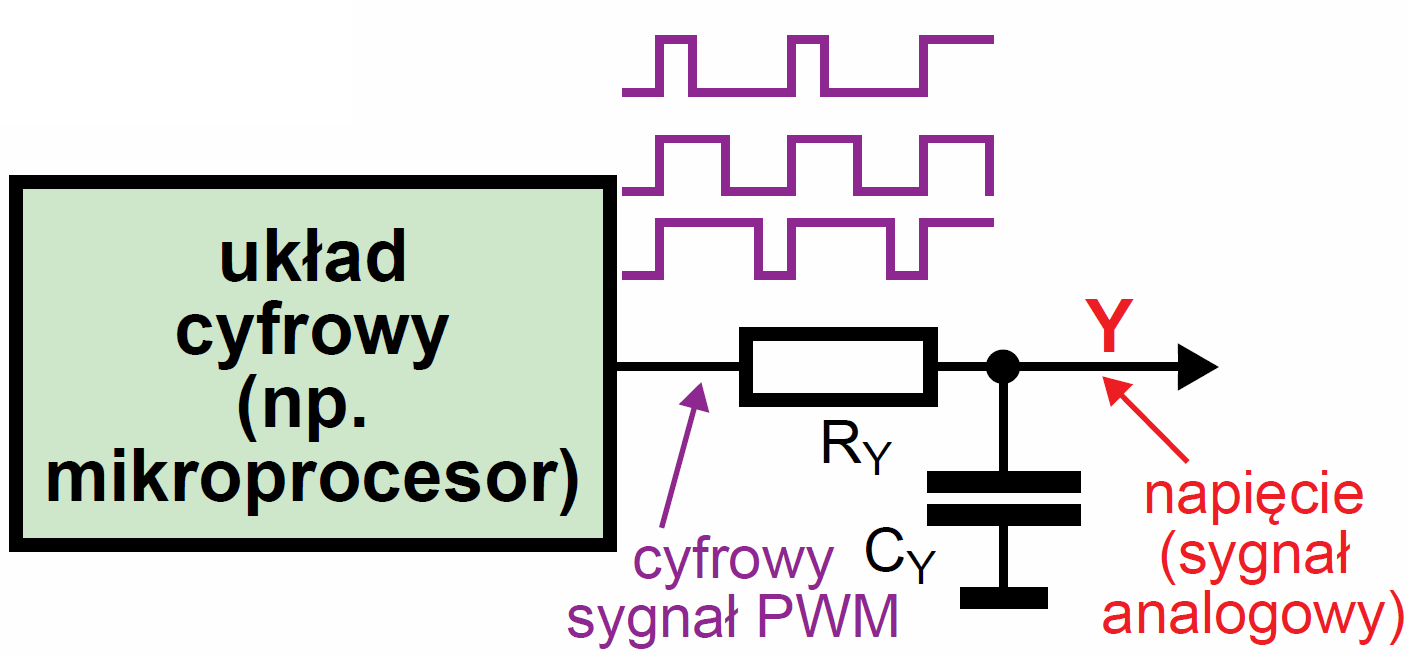
Co bardzo ważne, cyfrowy sygnał PWM można w dziecinnie łatwy sposób przetworzyć w sygnał analogowy – wystarczy prosty obwód uśredniający RC według rysunku 19. W punkcie Y otrzymujemy napięcie stałe o wartości dokładnie odpowiadającej współczynnikowi wypełnienia. Przetworniki PWM z filtrem RC są powszechnie wykorzystywane jako przetworniki cyfrowo-analogowe. Są to przetworniki o małej szybkości z uwagi na konieczną znaczną stałą czasową obwodu filtrującego RYCY. W następnym wykładzie zrealizujemy zdecydowanie szybszy przetwornik cyfrowo-analogowy.
Rysunek 19
A na razie wspomnijmy, iż modulator PWM można też zbudować według rysunku 20. Układ U1 pracuje jako generator i na kondensatorze C1 otrzymujemy przebieg zbliżony do trójkątnego. Komparator U2 porównuje chwilową wartość tego napięcia trójkątnego z napięciem stałym podanym na wejście A. Wypełnienie przebiegu na wyjściu X możemy regulować od zera do 100%.

Rysunek 20
W klasycznej modulacji PWM częstotliwość jest stała, a zmienia się tylko wypełnienie. W praktyce wykorzystuje się pokrewne metody, gdzie częstotliwość nie jest stała. Rysunek 21 pokazuje taki generator. Gdy tranzystor T1 jest zatkany, kondensator C1 rozładowuje się tylko przez R1, a ładuje się przez R1 i R2, więc czas trwania na wyjściu stanu wysokiego jest krótki. Wytwarzany przebieg ma współczynnik wypełnienia około 5%. Gdy tranzystor przewodzi, to po pierwsze zmniejsza czas rozładowania kondensatora. Przyspiesza rozładowanie, a więc skraca czas trwania stanu niskiego. Po drugie jeśli T1 przewodzi stale, to opóźnia też ładowanie kondensatora, bo „zabiera” część prądu płynącego przez R1, R2, przez co zmiany częstotliwości są stosunkowo małe. Napięcie Uster zmienia współczynnik wypełnienia.

Rysunek 21
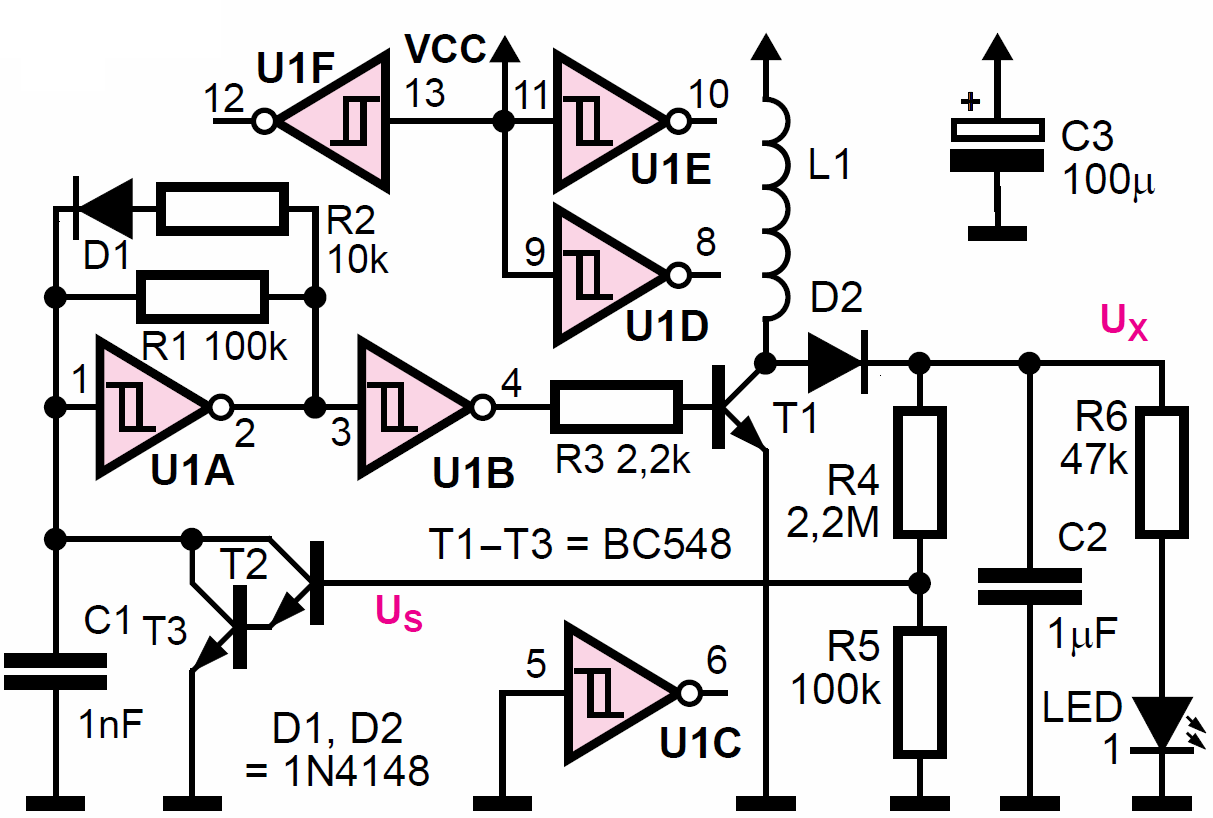
Wykorzystajmy taki układ w impulsowej przetwornicy podwyższającej z obwodem stabilizacji według rysunku 22. Indukcyjność L1 to cewka przekaźnika. Gdy T2, T3 nie przewodzą, tranzystor T1 przewodzi przez większość okresu i w cewce gromadzi się energia. W chwili zatkania T1 cewka, która „nie lubi zmian prądu” wytwarza impuls napięcia samoindukcji i prąd dalej płynie przez diodę D2, C2, R6 i LED1, co zwiększa napięcie wyjściowe Ux. Nadmierny wzrost Ux otworzy T1, T2, a to zmniejszy współczynnik wypełnienia impulsów sterujących T1, a więc ustabilizuje napięcie wyjściowe do wartości wyznaczonej przez dzielnik R4, R5.
Rysunek 22
Z uwagi na dużą rezystancję drutu cewki (bardzo małą dobroć), wydajność prądowa przetwornicy jest niewielka. Niemniej w takim układzie można byłoby uzyskać napięcie wyjściowe ponad 100 V, jednak z uwagi na dopuszczalne napięcie tranzystora T1, diody D2 i kondensatora C2 musi być ono mniejsze. Jak pokazuje fotografia 23, w moim modelu przy zasilaniu z baterii 9 V wynosi ono 22,1 V.
Fotografia 23
Jeżeli w układzie z rysunku 22 usuniemy R1 i sensownie dobierzemy R2 i C1, to uzyskamy układ, w którym zmiany napięcia sterującego Us powodują duże zmiany częstotliwości. Uzyskamy generator przestrajany napięciem, inaczej mówiąc VCO – Voltage Controlled Oscillator. W rodzinie CMOS4000 mamy kostkę 4046, która zawiera generator VCO (a także tak zwane komparatory fazy, bo jest kompletnym układem tzw. pętli fazowej PLL – Phase Locked Loop). Nie mając w zestawie bardzo pożytecznej kostki 4046 możemy zbudować sterowany dotykowo VCO według rysunku 24 i fotografii 25.
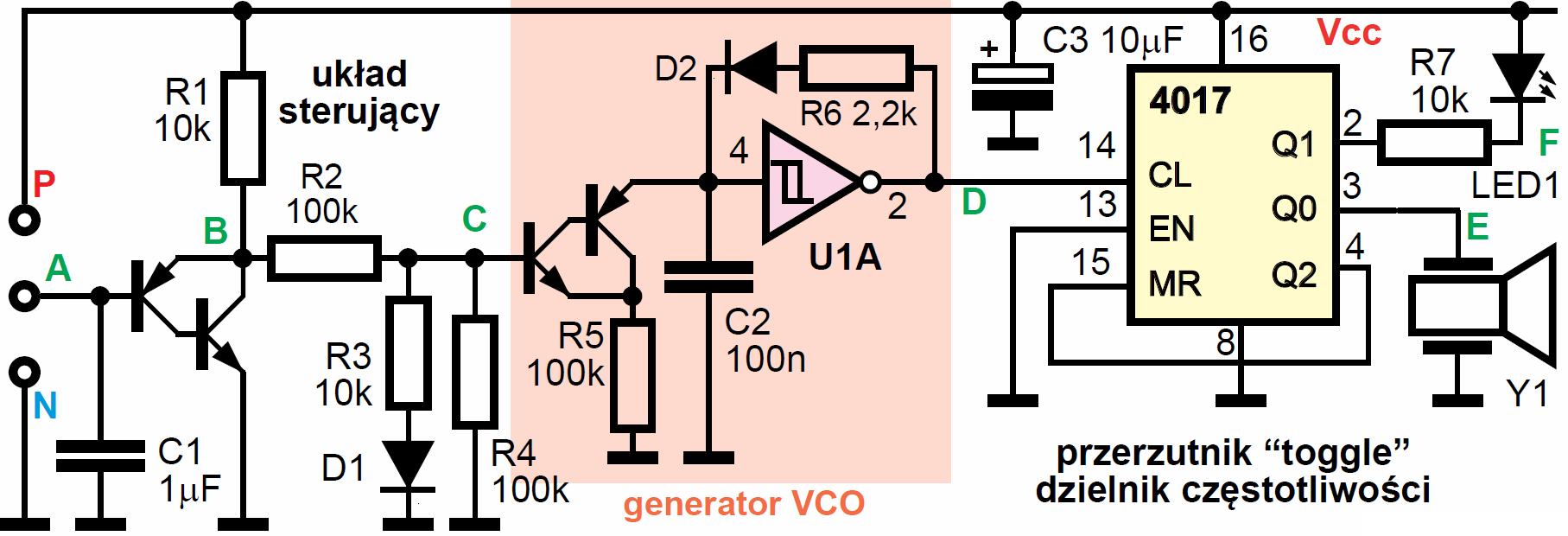
Rysunek 24
Fotografia 25
Dotykając jednocześnie punktu A i jednego z punktów P, N ładujesz lub rozładowujesz kondensator C1 i zwiększasz lub zmniejszasz częstotliwość generowanego przebiegu w szerokim zakresie. Elementy R2, R3, D1, R4 dopasowują wielkość sygnału sterującego – napięcie w punkcie C nie powinno być mniejsze od 0,6 V ani większe od 1/3 napięcia zasilającego. Sam generator VCO wytwarza w punkcie D wąskie impulsy szpilkowe, dlatego dodany jest dzielnik częstotliwości przez 2 z kostką 4017, co daje w punktach E i F przebieg o częstotliwości o połowę mniejszej, ale za to głośny, bo o wypełnieniu 50%. Podając na punkt A lub punkt C odpowiednio dobrany przebieg trójkątny uzyskalibyśmy syrenę policyjną.
A na koniec tajemniczy i intrygujący…
Theremin. Jest to tajemniczy instrument muzyczny, na którym gra się, zbliżając ręce do dwóch anten. Wynalazcą jest rosyjski uczony Lew Sergiejewicz Termen, znany też jako Leon Theremin. W roku 1920 zaprezentował on lampowe urządzenie, w którym zbliżenie ręki do jednej anteny zmieniało częstotliwość dźwięku, a do drugiej – głośność. Z technicznego punktu widzenia, urządzenie zawiera dwa generatory o dużej, ponadakustycznej częstotliwości. Częstotliwość jednego jest płynnie przestrajana przez zmianę pojemności, jaka tworzy się między anteną, a ciałem człowieka i ziemią. Nieliniowy układ (mieszacz) wytwarza przebieg o małej częstotliwości, będący różnicą częstotliwości tych dwóch generatorów. Podobną zasadę powszechnie wykorzystuje się w odbiornikach radiowych i telewizyjnych (tzw. superheterodynowych). W roli mieszacza można wykorzystać różne elementy, które mają nieliniową charakterystykę. Rolę mieszacza (a nawet tak zwanego detektora fazy) może też pełnić bramka EXOR (EXNOR). W Internecie można znaleźć zaskakującą propozycję układową bardzo uproszczonego pojemnościowego instrumentu Theremin według rysunku 26.
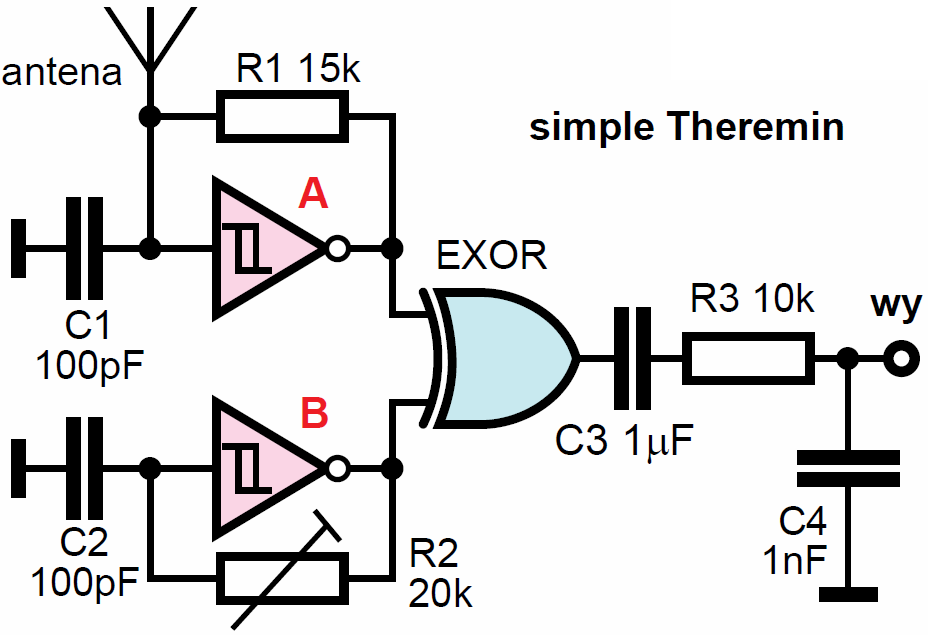
Rysunek 26
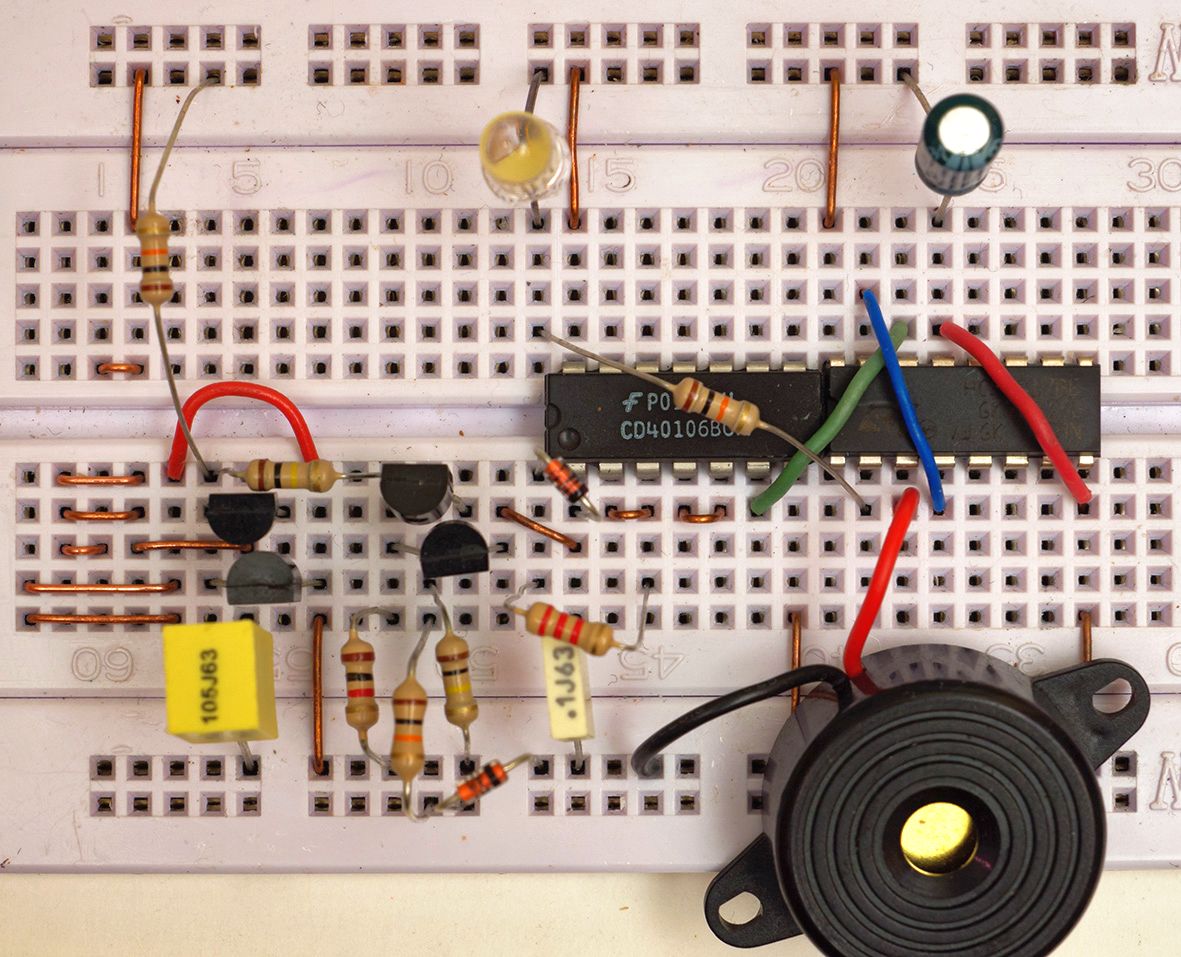
W praktyce trudno jest zbudować prawidłowo działający instrument, jeżeli inwertery A i B wchodzą w skład tej samej kostki. Problemem jest to, że w instrumencie dwa generatory przebiegu prostokątnego muszą pracować na dwóch częstotliwościach, bardzo niewiele się różniących. A jeżeli częstotliwości są podobne, to następuje wzajemny wpływ i synchronizacja obu generatorów wskutek oddziaływania pojemnościowego i przez obwody zasilania, przez co oba generatory dostrajają się do tej samej częstotliwości. Aby zmniejszyć wzajemny wpływ, należałoby wykorzystać generatory na inwerterach z oddzielnych układów scalonych. W zestawie jest tylko jedna kostka 40106, więc szanse na budowę funkcjonującego Theremina według rysunku 26 są małe, ale jak chcesz, możesz spróbować. Jeżeli jednak posiadasz dwa zestawy elementów i dwie kostki 40106, możesz zbudować układ według rysunku 27 i fotografii 28. Ważną częścią układu są filtry zasilania R3, C3, C5, oraz R4, C4, C6, które separują obwody zasilania kostek U1, U2. Bramka EXOR zbudowana jest z czterech bramek NAND kostki U3 (porównaj rysunek 3) i jest zasilana „przed filtrami”. Jako element wykonawczy włączone są jakiekolwiek słuchawki, w których występuje głośny sygnał, będący różnicą częstotliwości obu generatorów. Zbliżenie ręki zmienia pojemność w znikomym stopniu (poniżej 1 pikofarada), dlatego aby zmiany częstotliwości były znaczące, pojemności C1, C2 muszą być bardzo małe, co najwyżej do 100pF. Dlatego nie stosujemy kondensatorów, tylko w każdym z generatorów wykorzystujemy niewielką pojemność między blaszkami płytki stykowej, stąd na niej tyle zwór i taki dziwnie narysowany schemat z „grzebieniowymi” pojemnościami C1, C2.
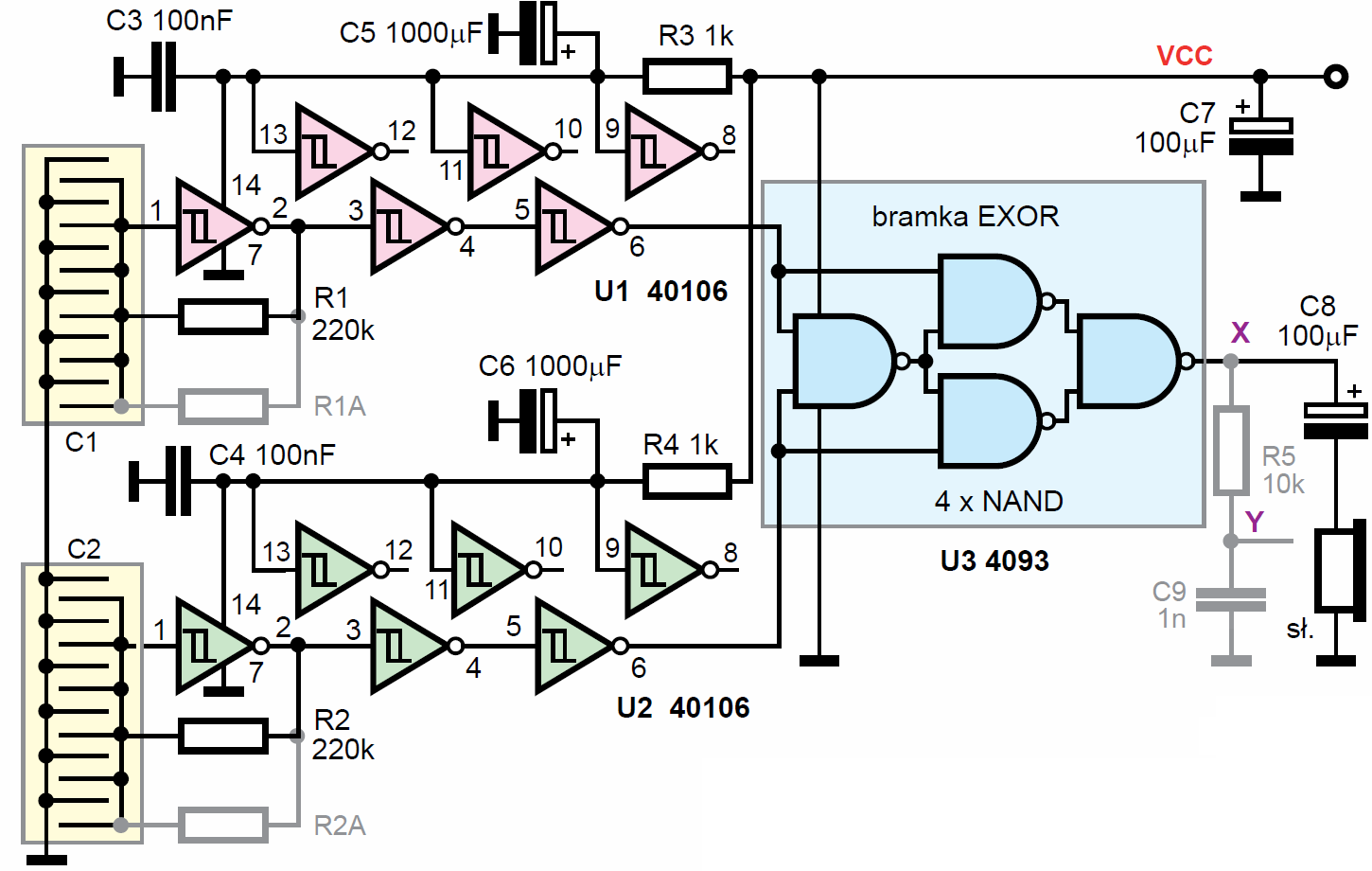
Rysunek 27
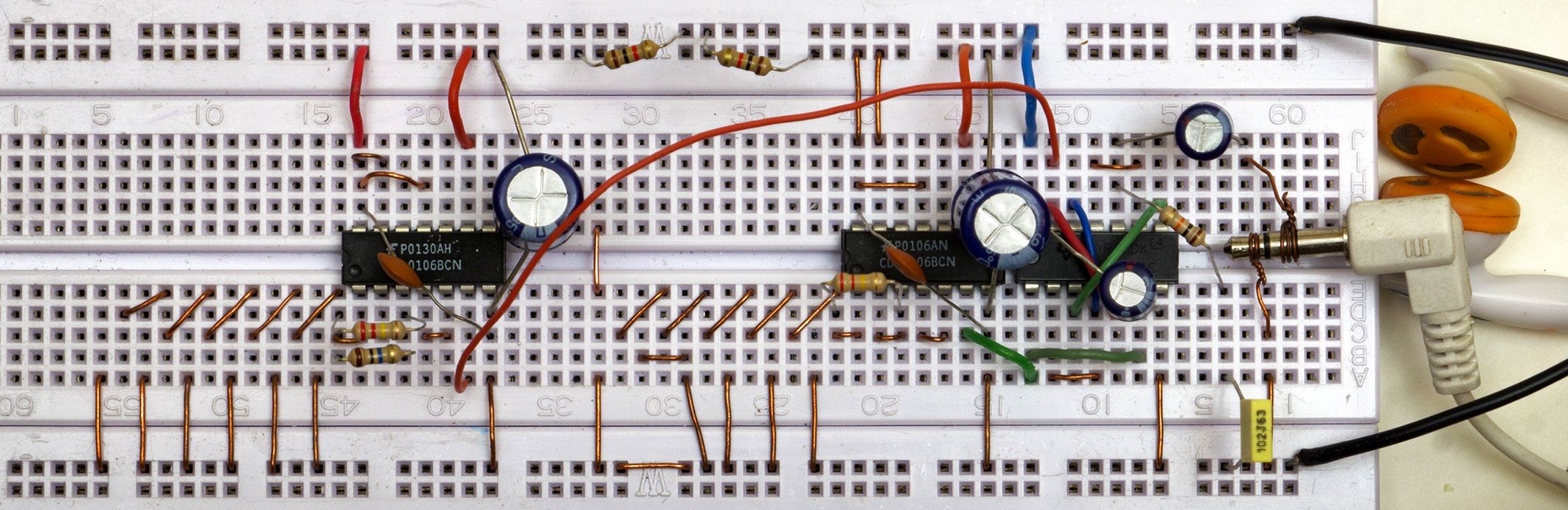
Fotografia 28
W moim modelu, częstotliwości pracy obu generatorów wynoszą około 122 kHz. Najlepiej byłoby, gdyby w takim urządzeniu pracowały dwa układy 40106 tego samego wytwórcy z jednej serii produkcyjnej, bo wtedy przy jednakowych elementach RC częstotliwości powinny być zbliżone. Nawet wtedy zapewne trzeba będzie skorygować częstotliwość jednego z generatorów tak, aby w spoczynku w słuchawkach występował dźwięk o możliwie małej częstotliwości. Uruchomienie bez przyrządów pomiarowych jest możliwe, wymaga jednak trochę cierpliwości. Najpierw trzeba uzyskać jakikolwiek wyraźny pisk w słuchawkach, a potem dołączając równolegle do R1 albo do R2 rezystory o jak największej rezystancji, trzeba zmniejszyć częstotliwość „wyższego” generatora, by różnicowa częstotliwość w słuchawkach była jak najniższa. U mnie, jak pokazuje fotografia, trzeba było do rezystora R1=220 kΩ dołączyć równolegle 10-megaomowy rezystor. Wtedy w słuchawkach wystąpił przebieg o stosunkowo niskiej częstotliwości różnicowej. Rysunek 29 pokazuje (niebieski) przebieg w punkcie X za bramką EXOR oraz (czerwony) odfiltrowany przebieg o częstotliwości różnicowej, występujący w punkcie Y.
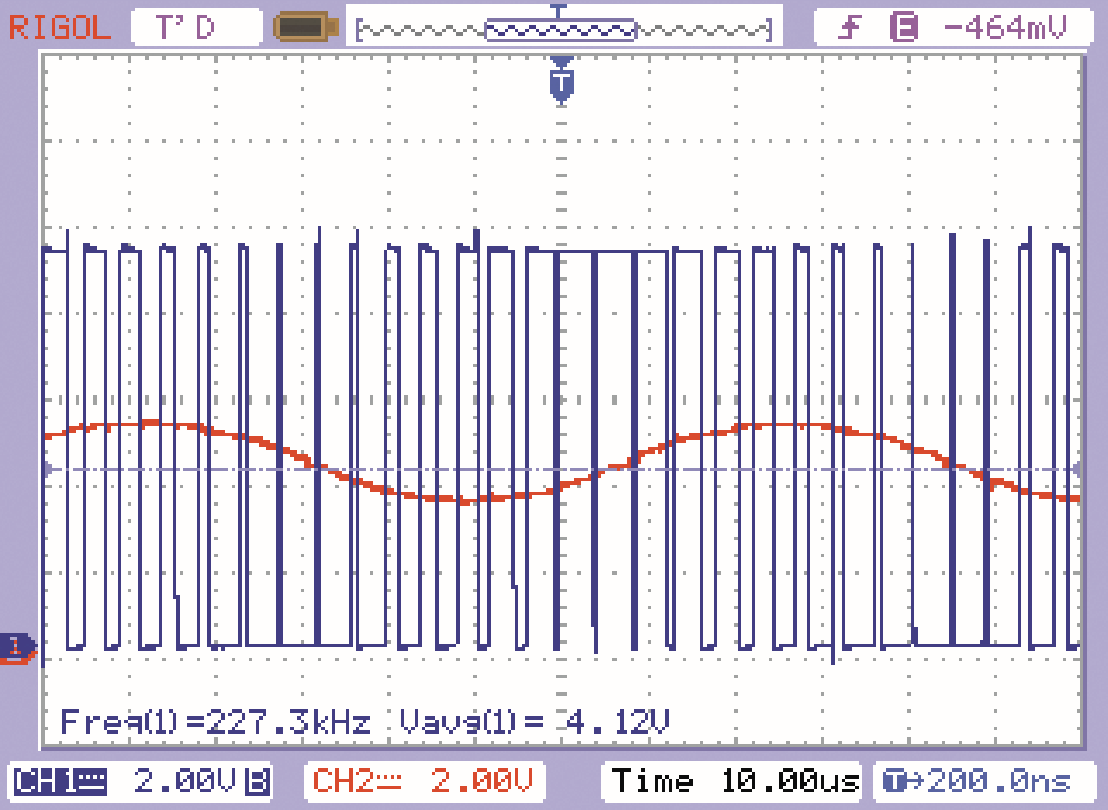
Rysunek 29
Zbliżenie ręki do którejkolwiek anteny (C1, C2) powoduje niewielką procentową zmianę częstotliwości jednego z generatorów, ale różnica ich częstotliwości zmienia się znacznie, co wyraźnie słychać w słuchawkach.
Piotr Górecki