Pierwsze kroki w cyfrówce – część 11
W poprzednim odcinku przedstawiłem ci kilka interesujących kostek układów czasowych. W tej części dalszy ciąg prezentacji.
Zastanawiałem się, czy prezentować kostkę 4047, którą osobiście stosuję bardzo rzadko. Przedstawię ci ją z trzech względów:
1. Jest to układ o dużej stałości czasu w funkcji temperatury i napięcia zasilającego.
2. Wiele egzemplarzy kostki może pracować przy bardzo niskim napięciu zasilającym, już nieco powyżej 1 V.
3. Wbudowany dodatkowy dzielnik przez 2 umożliwia różnorodne wykorzystanie.
Odnośnie do punktu pierwszego – stabilność częstotliwości i czasu rzeczywiście jest bardzo dobra, jak na układy CMOS: w zakresie częstotliwości do 10 kHz wynosi ±0,5% +0,015%/°C dla Uzas = 10 V±10%. Oczywiście w wielu układach pomiarowych taka stabilność nadal jest zbyt mała i trzeba stosować rezonator kwarcowy i odpowiednie dzielniki.
Istotną zaletą jest możliwość zasilania niskim napięciem. Układy CMOS serii 4000 generalnie mają zakres napięć zasilania: 3…18V. Z moich doświadczeń wynika, że wiele egzemplarzy pracuje nawet przy napięciach poniżej 1,5 V, co w pewnych sytuacjach pozwala budować układy zasilane z jednej baterii 1,5 V. Oczywiście zalecam daleko posuniętą ostrożność, bo napięcie baterii z czasem spada i układ musiałby niezawodnie pracować nawet przy zasilaniu napięciem: 1,1…1,2 V. Ale w każdym razie warto o tym wiedzieć.
Musisz jeszcze wiedzieć, że oprócz oscylatora (generatora), trochę innego, niż w kostkach: 4060 i 4541 – wymagającego tylko dwóch elementów zewnętrznych – układ ma wewnętrzny dzielnik przez 2. Także i tu kondensator C nie może być kondensatorem elektrolitycznym.
Kostka ma trzy, a właściwie nawet cztery wyjścia. Pokazuje to w uproszczeniu rysunek 1.
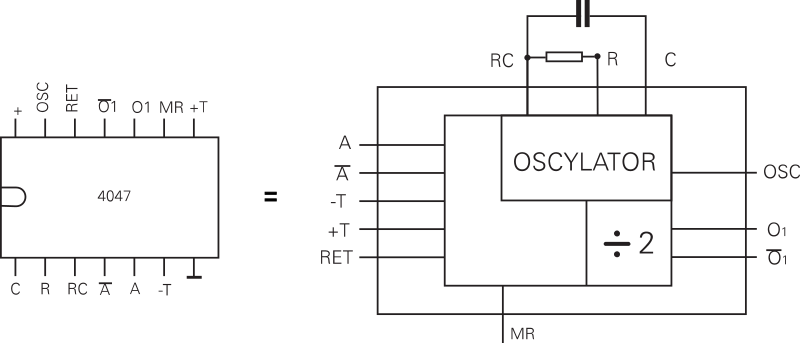
Rysunek 1
Celowo zaznaczyłem ci dodatkowe wyjście z nóżki oznaczonej R (nóżka 2). Przebieg na tej nóżce ma przeciwną fazę, niż przebieg na wyjściu OSC. Zauważ, że w przypadku generatora astabilnego uzyskasz jakby licznik zliczający do 4, a na wspomnianych wyjściach otrzymasz cztery związane z sobą przebiegi, które łatwo zdekodujesz za pomocą jakichkolwiek dwuwejściowych bramek. Jeśli nie załapałeś o co tu chodzi, nie przejmuj się – to rzeczywiście jest wskazówka dla konstruktorów trochę bardziej zaawansowanych. W każdym razie wspomniana właściwość przynajmniej mnie już parę razy się przydała.
Ty na pewno musisz wiedzieć, że przebieg na wyjściu OSC nie musi mieć, i zwykle nie ma, współczynnika wypełnienia równego 50%. Jak wiesz, praktycznie wszystkie generatory RC z bramkami nie dają przebiegu o wypełnieniu dokładnie 50% – jest to wspólna cecha wszystkich prostych generatorów. A przebieg o wypełnieniu dokładnie 50% jest potrzebny na przykład do sterowania wyświetlacza ciekłokrystalicznego (LCD). Taki symetryczny przebieg otrzymasz w każdym układzie z licznikiem, a więc także na wyjściach licznika kostek: 4060 i 4541. Dzięki zastosowaniu dzielnika przez 2, przebieg o współczynniku wypełnienia dokładnie równym 50% występuje również na wyjściach: Q i Q\ (nóżki 10, 11) układu 4047. Ta informacja może ci się kiedyś przyda.
Ty jednak najprawdopodobniej będziesz stosował układ 4047 w typowych zastosowaniach.
Nie podaję ci szczegółowego schematu blokowego tej kostki, bo na pewno byś się załamał i nabrał do niej nieprzezwyciężonego wstrętu. Kostka ta, jak zauważyłeś, ma przerażająco dużo wejść sterujących (oznaczonych: A, A\, −T, +T, RET i MR). Wcale nie musisz rozumieć ich działania – jeśli chcesz, zajrzyj do katalogu. Na pewno wiesz, do czego służy wejście MR: podanie tam stanu wysokiego zeruje wszystkie obwody wewnętrzne. Ale w sumie wykorzystanie układu 4047 jest bardzo proste i naprawdę nie ma z nim kłopotów. Wykorzystaj trzy poniższe rysunki, pokazujące sposoby sterowania kostki w obu trybach pracy. Znów, jak widzisz, cała rzecz się sprowadza do właściwego połączenia wejść sterujących z masą i plusem zasilania. Nic trudnego!
Rysunek 2 pokazuje najpopularniejsze sposoby wykorzystania układu 4047 w trybie astabilnym, czyli jako generatora przebiegu prostokątnego.
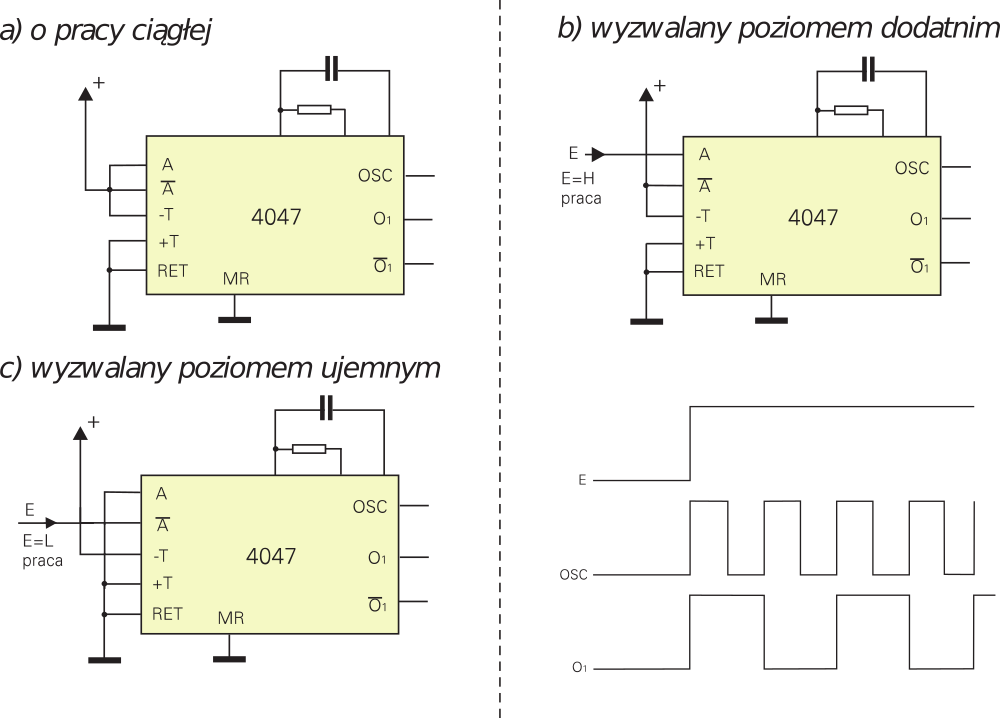
Rysunek 2
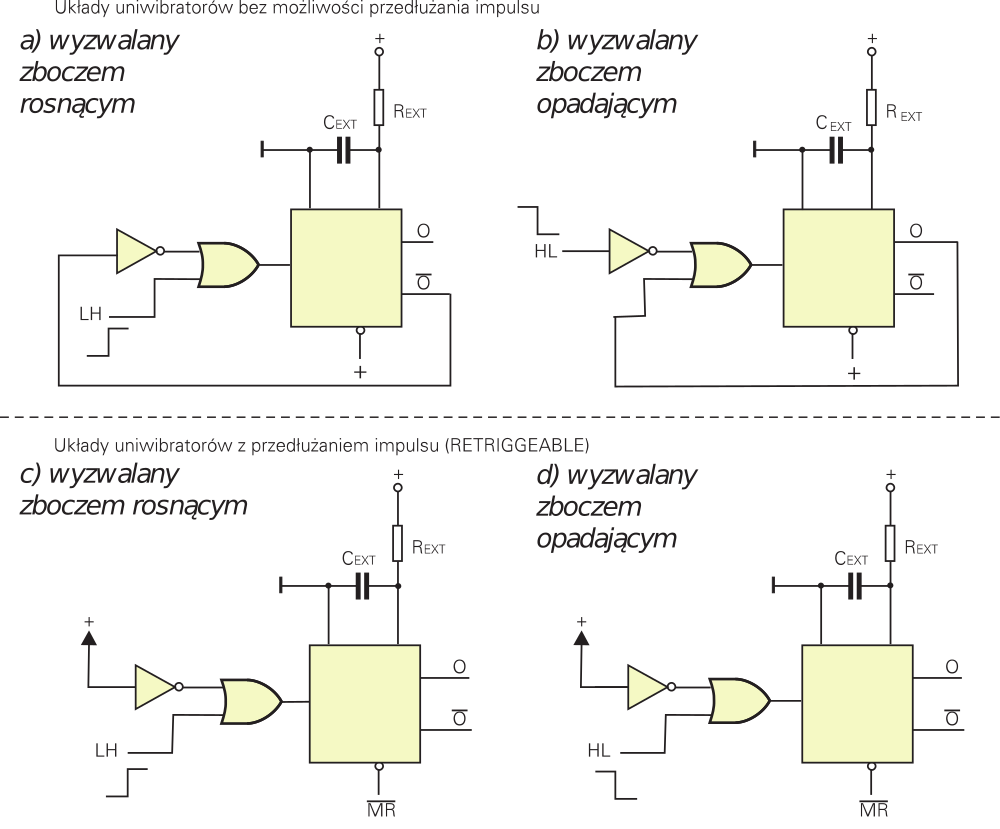
Rysunek 3 prezentuje najpopularniejsze sposoby wykorzystania układu 4047 w trybie monostabilnym, czyli do wytwarzania pojedynczego impulsu. Pamiętaj, że układ wyzwalany jest zboczem (czyli zbocze to rozpoczyna cykl pracy), a impuls na wyjściach: Q i Q\ trwa zawsze tylko przez czas: T = 2,48×R×C.
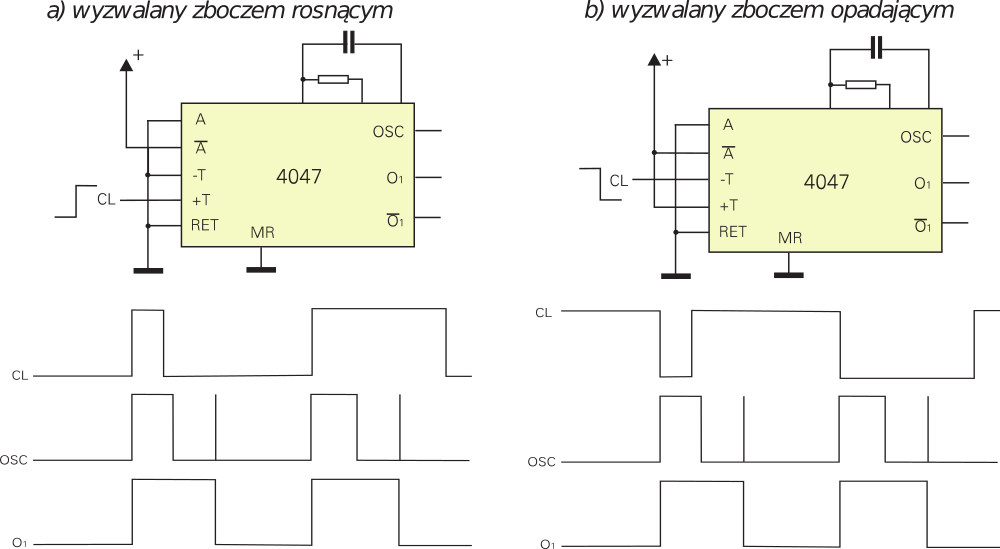
Rysunek 3
Uważaj teraz! Impuls wyjściowy ma taką długość nawet wtedy, gdy impuls wyzwalający jest dłuższy, niż czas T. Porównaj przebiegi na rysunku 3. To jest dość istotna sprawa praktyczna. Pamiętaj o tym! Inaczej mówiąc, w układach pokazanych na rysunku 3 zmiany stanów na wejściu wyzwalającym w czasie generowania impulsu nie mają żadnego wpływu na pracę oscylatora. Czasem jest to zaletą – można powiedzieć, że w czasie generowania impulsu układ jest całkowicie zajęty sobą i nie reaguje na żadne sygnały z zewnątrz.
Niekiedy potrzebny jest układ monostabilny, w którym kolejne impulsy wyzwalające będą przedłużać impuls wyjściowy. Do takiego ponawianego wyzwalania wykorzystuje się wejście RET(rigger).
Na rysunku 4 możesz zobaczyć stosowny układ połączeń oraz przebiegi czasowe. Nie jest to chyba dla ciebie żadna nowość, bo w poprzednich odcinkach pokazywałem ci, jak to samo można zrobić z użyciem zwykłych bramek. Przewaga kostki 4047 nad bramkami polega tylko na jej większej stabilności napięciowej i temperaturowej.
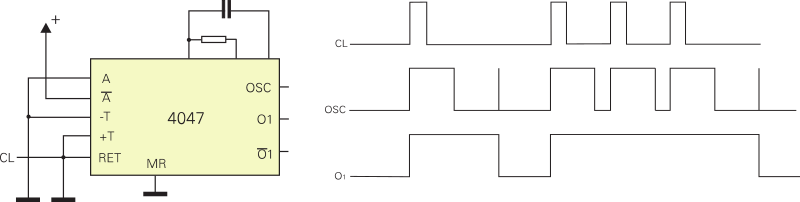
Rysunek 4
W mniej dokładnych zastosowaniach używaj raczej omówionych wcześniej rozwiązań z bramkami, a nie kostki 4047. Teraz przechodzimy do układu 4046.
4046
Kostka CMOS 4046 jest układem pętli synchronizacji fazowej – Phase Locked Loop, w skrócie PLL. O pętli synchronizacji fazowej kiedyś opowiem ci szczegółowo, a dziś powinieneś dowiedzieć się, że tak strasznie nazwany układ, ma na pokładzie bardzo przydatny dla ciebie generator – generator przestrajany napięciem, czyli VCO.
Na rysunku 5 znajdziesz blokowy schemat wewnętrzny i układ wyprowadzeń kostki 4046.
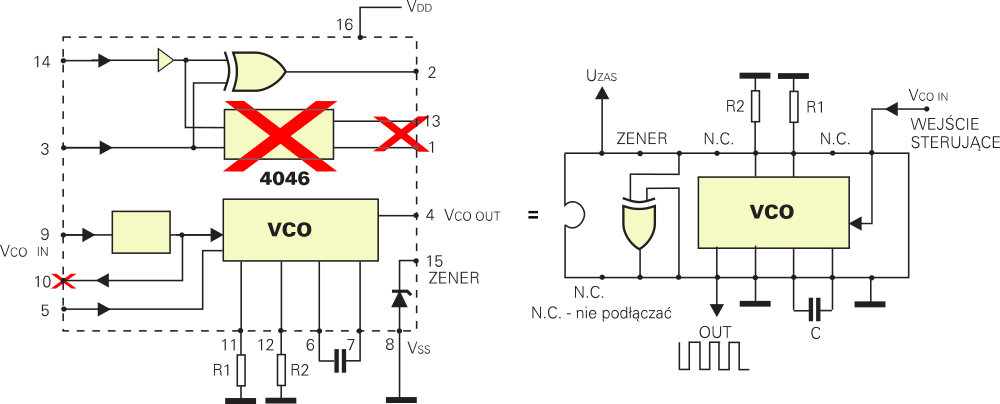
Rysunek 5
Czerwonym kolorem wykreśliłem niektóre, niepotrzebne ci wyprowadzenia oraz blok jednego detektora fazowego, którego działanie jest dość skomplikowane, i na pewno na razie nie będziesz go wykorzystywał. Nie musisz nawet wiedzieć, co to jest detektor fazy. Ale wiedz, że spośród dwóch detektorów fazy mających wspólne wejścia, jeden jest najzwyczajniejszą w świecie bramką EX−OR. Bramkę tę możesz śmiało wykorzystywać według upodobania. Podobnie, być może zechcesz wykorzystać wbudowaną diodę Zenera o napięciu 7 V±0,3 V.
Ale wracajmy do naszego generatora sterowanego napięciem, czyli VCO.
Znów nie musisz wszystkiego do końca rozumieć. Wspomnę ci tylko, że generator pracuje tu zupełnie inaczej, niż w dotychczas poznanych układach. Jego częstotliwość wyznaczona jest wartością kondensatora C, dwóch rezystorów: R1 i R2, oraz oczywiście wartością napięcia na wejściu sterującym VCOIN. Przebieg wyjściowy występuje na końcówce VCOOUT, czyli na nóżce 4.
Może wyda ci się to skomplikowane – w istocie wcale tak nie jest.
Uważaj! przy napięciu na wejściu VCOIN równym zero (potencjał masy) częstotliwość jest minimalna. Gdy napięcie końcówki VCOIN jest równe napięciu zasilania, częstotliwość jest maksymalna – proste, prawda?
Teraz o tych częstotliwościach. Sam miałem z tym kłopoty, a to dlatego, że autorzy niektórych polskich publikacji na temat tej kostki źle przepisali z katalogu jeden wzór, i potem ten błąd pokutował przez długi czas w kolejnych opisach.
Tymczasem sprawa jest prosta – najogólniej rzecz biorąc, jeden rezystor służy do ustalenia częstotliwości minimalnej (R2), drugi – częstotliwości maksymalnej (R1).
Co ciekawe, rezystor R2 może mieć wartość nieskończenie wielką, czyli… po prostu może go nie być i nóżka 12 pozostanie niepodłączona. Jaka będzie wtedy częstotliwość minimalna? Rusz głową!
Oczywiście będzie równa zeru!
W takiej sytuacji rezystor R1 wyznaczy częstotliwość maksymalną (osiąganą przez podanie napięcia zasilania na nóżkę 9).
Częstotliwość będzie się więc liniowo zmieniać wraz ze zmianą napięcia końcówki VCOIN, jak pokazuje to rysunek 6a.
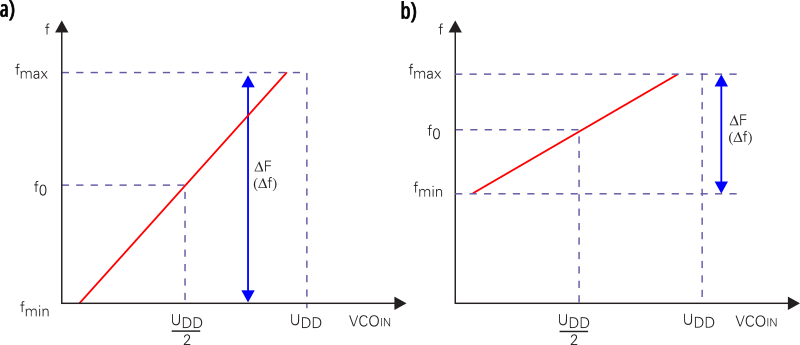
Rysunek 6
Zauważ, że przy napięciach bliskich masy i plusa występuje pewna strefa martwa – częstotliwość pozostaje stała, ale w praktyce nie ma to większego znaczenia.
Często potrzebny będzie ci generator, którego częstotliwość można zmieniać w pewnym zakresie, powiedzmy od częstotliwości fmin do fmax, ale nie od zera. Wtedy przebieg zmian częstotliwości w zależności od zmian napięcia będzie wyglądał jak na rysunku 6b.
Jak to osiągnąć?
Naturalnie przez zastosowanie zarówno rezystora R2, jak i R1.
Ich dobór jest w sumie bardzo prosty. Przypuśćmy, że chcesz zrobić przestrajany generator do syreny alarmowej z przetwornikiem piezo i chcesz uzyskać zakres przestrajania od 2,5 kHz do 5 kHz.
Najpierw wstępnie określ wartości R2 i C. Pomocą będzie prosty wzór zaczerpnięty z katalogu:
![]()
Te 32 pF to pojemność własna generatora, i przy częstotliwościach poniżej 100…200 kHz spokojnie możesz ją pominąć. Po pominięciu tego składnika i przekształceniu uzyskasz:
![]()
Ale wartości R2 jeszcze nie znasz. Nie szkodzi! Przyjmij jakąś wstępną wartość w zakresie: 20 kΩ…1 MΩ. Niech to będzie na przykład 100 kΩ.
Teraz oblicz C. W tym przypadku:
![]()
Takiej pojemności nie ma w szeregu, więc zastosujesz albo 3,3 nF, albo 4,7 nF, nie gra to żadnej roli. Pamiętaj, że musi to być kondensator stały, nie elektrolityczny.
Dopiero teraz dobierz dokładniej wartość R2, aby ustalić częstotliwość minimalną. Nie radzę ci jednak korzystać z podanych właśnie wzorów, bo rozrzuty parametrów poszczególnych kostek są duże i rzeczywiście potrzebna wartość może różnić się od wyliczonej ze wzoru nawet 3 czy 4−krotnie. Dlatego odpuść to sobie i po prostu w układzie praktycznie ustaw potrzebną częstotliwość minimalną (2,5 kHz), dobierając wartość R2 i mierząc częstotliwość przyrządem, w ostateczności „na ucho” (nie zapomnij podłączyć wejścia VCOIN do masy).
Podobnie raczej psu na budę zda się drugi wzór (właśnie ten wzór został kiedyś źle przepisany z katalogu):
![]()
Wzór ten nie jest bezużyteczny, bo pokazuje, że wartość rezystancji R1 określa po prostu zakres zmian częstotliwości przy zmianach napięcia VCOIN w zakresie 0…VDD.
Po przekształceniu i pominięciu niewielkiej pojemności własnej otrzymasz:
![]()
Jeśli zechciałbyś się zastanowić nad wnioskami wynikającymi z tego wzoru, przekonasz się, że wartość R1 może być zarówno większa, jak i mniejsza od R2 – zależeć to będzie od potrzebnego zakresu zmian częstotliwości.
W praktyce ze względu na wspomniane rozrzuty, dokładną wartość R1 i tak będziesz musiał dobrać eksperymentalnie, mierząc częstotliwość przyrządem, lub „na ucho” (tym razem nie zapomnij dołączyć wejścia VCOIN do plusa zasilania).
Jeśli ostatnie rozważania nie są dla ciebie do końca jasne, spróbuj zrealizować w praktyce procedurę doboru elementów, a przekonasz się, że nie ma tu nic trudnego.
Na rysunku 7 znajdziesz typowy układ aplikacyjny generatora przestrajanego napięciem – jak widzisz, nie ma tu nic trudnego. Wejście INH (nóżka 5) może pełnić rolę wejścia bramkującego (INH=L – praca; INH=H – generator zatrzymany).
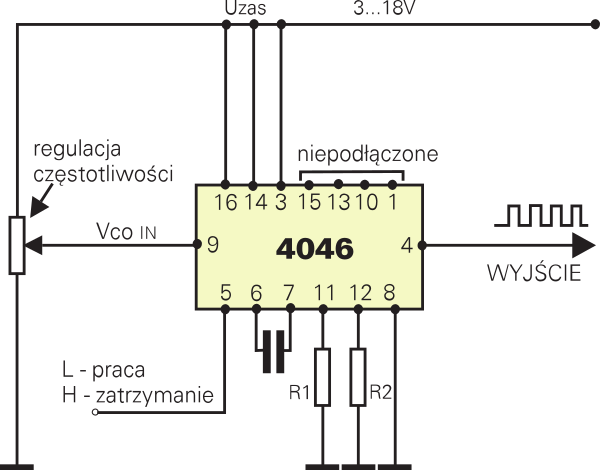
Rysunek 7
Wyprowadzeń nr 1, 10, 13 nie podłączaj. Jeśli nie wykorzystasz bramki EX− OR, wejścia 3 i 14 możesz dołączyć do masy albo plusa zasilania, jak ci wygodniej. Diodę Zenera z końcówki 15 możesz wykorzystać do stabilizacji napięcia zasilającego, o ile nie stosujesz stabilizowanego zasilacza, tylko zasilasz układ z baterii.
Na koniec jeszcze kilka informacji, które mogą ci się przydać.
– Generowany przebieg ma, z dość dużą dokładnością, wypełnienie równe 50%. Na końcówkach 6 i 7 występuje przebieg zmienny, ale niestety nie jest to przebieg trójkątny – jest to taka „połamana piła”, która raczej do niczego się nie przydaje.
– Rezystancja wejścia VCOIN jest większa niż 150 MΩ, czyli można uważać, że jest to typowe wejście CMOS, wcale nie pobierające prądu.
– Liniowość przetwarzania napięcia na częstotliwość wynosi typowo około 1%, co umożliwia stosowanie układu w mniej dokładnych urządzeniach pomiarowych. Przydatność tę ograniczają jednak zarówno zauważalny wpływ zmian napięcia zasilania na częstotliwość, jak również cieplny współczynnik częstotliwości, wynoszący: 0,015…0,012%/°C (współczynnik ten jest lepszy przy wyższym napięciu zasilania).
Pamiętaj, że przy braku rezystora R2 (nóżka 12 niepodłączona), uzyskuje się generator o częstotliwości liniowo zależnej od napięcia podanego na wejście VCOIN. Często potrzebne są generatory przestrajane, o logarytmicznej zależności częstotliwości wyjściowej od napięcia sterującego. Wykonanie tak przestrajanego generatora z kostką 4046 jest trudne, bo trzeba dodać na wejściu VCOIN układ logarytmujący. Do układów przestrajanych „logarytmicznie” stosuje się raczej generatory sterowane prądowo, a nie napieciowo. Dlatego kostka 4046 nie jest tu godnym polecenia rozwiązaniem.
– Najwyższa możliwa do uzyskania wartość częstotliwości fmax wynosi: 500 kHz…2 MHz, zależnie od napięcia zasilającego (5…18 V). Dla większych częstotliwości należy stosować inne kostki VCO – dziś dostępnych jest sporo kostek VCO pracujących przy częstotliwościach dziesiątek i setek megaherców – ten temat wykracza jednak zdecydowanie poza ramy tego cyklu.
Zachęcam cię do praktycznych eksperymentów z kostką 4046 – na pewno ją polubisz!
Na zakończenie materiału o generatorach podam ci jeszcze z obowiązku krótkie informacje o kilku przerzutnikach monostabilnych.
4098, 4528, 4538
Wszystkie trzy układy CMOS 4098, 4528, 4538 mają dokładnie taki sam rozkład wyprowadzeń i takie same funkcje. Różnią się budową wewnętrzną, co nas zupełnie nie obchodzi – to już jest sprawa producentów. Układ 4538 w katalogu określony jest jako precyzyjny, należy więc oczekiwać, że ma dużą stabilność czasu impulsu w funkcji temperatury i napięcia zasilającego (oczywiście w precyzyjnych zastosowaniach trzeba też uwzględnić stabilność zewnętrznych elementów RC).
Każda z wymienionych kostek zawiera dwa identyczne układy generatora monostabilnego, wytwarzającego po pobudzeniu jeden impuls o długości wyznaczonej przez zewnętrzne elementy RC. Tym razem kondensator C może być elektrolityczny – w stanie spoczynku cały czas pozostaje pod napięciem.
Uproszczony schemat blokowy i układ wyprowadzeń znajdziesz na rysunku 8.
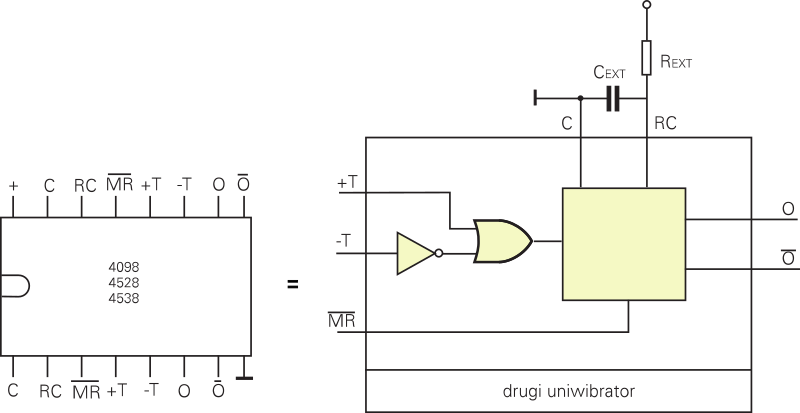
Rysunek 8
Natomiast rysunek 9 pokazuje przykłady zastosowania. Zauważ, że wejście MR jest zanegowane, to znaczy, że przez cały czas pracy powinien być tam stan wysoki, a zerowanie uzyskuje się po podaniu stanu niskiego.
Rysunek 9
Czas impulsu wynosi mniej więcej: T = 0,7×R×C a jego rozrzuty mogą sięgać kilkudziesięciu procent. Dlatego do dokładnych zastosowań trzeba dobrać rezystancję drogą eksperymentu.
Jak powiedziałem, podaję ci te informacje z obowiązku, bo nigdy nie stosowałem tych kostek – zawsze obwody opóźnienia czy uniwibratory realizowałem innymi sposobami.
Podsumowanie
Podałem ci sporo informacji o kilku interesujących kostkach. Polecam twojej uwadze szczególnie układy: 4541 i 4046, bo mają ciekawe właściwości.
Jak zawsze zachęcam do eksperymentów i praktycznych prób zastosowania opisanych układów.
A kolejny odcinek cyklu znajdziesz tutaj.
Piotr Górecki