Pierwsze kroki w cyfrówce – część 10
Jak obiecałem, w dzisiejszym odcinku zajmiemy się generatorami bardziej złożonymi, niż te omówione w poprzednim odcinku.
Generatory CMOS (i nie tylko)
Żebyś jednak nie zatracił właściwych proporcji przypomnę, że w zdecydowanej większości konstruowanych układów można i należy stosować najprostsze rozwiązania z bramkami i inwerterami. Jeśli przeprowadziłeś proponowane przeze mnie przed miesiącem eksperymenty, sam mogłeś się przekonać, że stabilność częstotliwości w funkcji temperatury i napięcia zasilającego jest wystarczająca do większości zastosowań. Jeśli jeszcze tego nie zrobiłeś, zdecydowanie cię namawiam, zarówno do sprawdzenia stabilności termicznej, jak i napięciowej oraz do skrupulatnego zapisania warunków eksperymentu i uzyskanych wyników.
W dotychczasowych odcinkach zapoznałem cię z różnorodnymi układami czasowymi, wykorzystującymi bramki i inwertery. Ale nie zawsze wystarczą prościutkie generatory z bramkami, dlatego musisz koniecznie znać kilka innych rozwiązań. Nie tylko znać, ale i rozumieć, jakie są ich właściwości i w jakich przypadkach należy je stosować.
Szczególne cechy
Poniżej wspomnę o kilku ważnych cechach generatorów.
1. W wielu układach potrzebne są generatory bramkowane. To znaczy, że generator ma wejście sterujące, czyli właśnie bramkujące. Generator zaczyna pracować dopiero po podaniu odpowiedniego stanu logicznego na wejście sterujące.
Nieodłączną cechą ogromnej większości prostych generatorów jest fakt, że pierwszy generowany impuls jest znacznie dłuższy od pozostałych. Zwykle nie jest to przeszkodą, ale w bardzo rzadkich przypadkach ma to znaczenie i wtedy trzeba szukać generatora, który generuje wszystkie impulsy równej długości. Najprostszym praktycznym rozwiązaniem jest zastosowanie generatora wyposażonego w dodatkowy licznik. Obecność licznika, który musi zliczyć dużą liczbę impulsów generatora, by zmienić stan na swym wyjściu, skutecznie redukuje ten problem. Idea pokazana jest na rysunku 1.
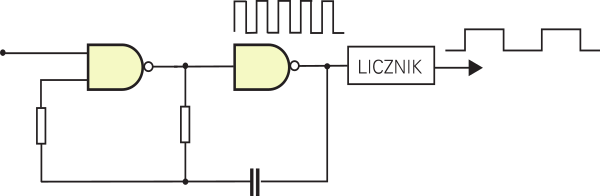
Rysunek 1
Na przykład jeśli nawet zastosowany generator będzie wytwarzał pierwszy impuls o podwójnej długości, to dzięki zastosowaniu dziesięciobitowego licznika dwójkowego (liczącego do 210, czyli do 1024) pierwszy impuls na wyjściu tego licznika będzie dłuższy od następnych mniej niż o 1 promil (0,1%). Radykalna poprawa, prawda?
Ponieważ współczesne układy CMOS pracują bez problemu przy częstotliwościach ponad 1 MHz, więc nawet zastosowanie licznika dziesięciobitowego umożliwia uzyskanie na wyjściu licznika częstotliwości rzędu 1kHz i dowolnie większych. Nie zapominaj o tej możliwości.
Idea ta jest bardzo prosta do zrealizowania w kilku kostkach CMOS – o szczegółach powiem ci za chwilę.
2. W wielu sytuacjach potrzebne są generatory (oraz przerzutniki monostabilne, wytwarzające jeden impuls) o bardzo długich czasach. Można do tego wykorzystać generator z bramką Schmitta i zastosować kondensatory elektrolityczne o dużej pojemności, najlepiej tantalowe, spójrz na rysunki 4 i 5 tym odcinku oraz rysunek 7 w tej części cyklu.
Takie rozwiązanie jest jednak niezbyt chętnie stosowane przez konstruktorów, przede wszystkim ze względu na duży rozrzut pojemności elektrolitów oraz duże zmiany tej pojemności z upływem czasu i w funkcji temperatury. Poza tym można powiedzieć, że generator z dużymi elektrolitami to rozwiązanie „nieeleganckie”.
Dlatego do uzyskania przebiegów o bardzo małej częstotliwości (poniżej 1 Hz) i impulsów o czasie powyżej 1 sekundy, zazwyczaj stosuje się właśnie odpowiednie układy scalone z wewnętrznymi licznikami. Zastosowanie licznika pozwala uzyskać impulsy o dowolnej długości, rzędu minut, godzin lub nawet dni.
3. Generatory o zmiennej częstotliwości. Najczęściej do zmiany częstotliwości generatora wykorzystuje się potencjometr. Są jednak zastosowania, gdzie potrzebny jest generator przestrajany napięciem. Generator taki nazywany jest VCO = Voltage Controlled Oscillator, czyli właśnie generator przestrajany napięciem. Przyzwyczaj się do tego skrótu, bo powszechnie spotyka się go w literaturze elektronicznej. Kiedyś próbowano wprowadzić polski skrót – GPN, ale nie przyjął się on w praktyce.
W źródłach pisanych spotyka się różne propozycje wykonania generatora przestrajanego napięciem. Bardzo często są to precyzyjne przetworniki napięcia na częstotliwość wykorzystywane w technice pomiarowej, lecz niekiedy w amatorskiej literaturze można spotkać niepotrzebnie rozbudowane i po prostu kiepskie rozwiązania takich generatorów.
Ja generalnie chciałbym ci polecić prosty sposób, wykorzystujący kostkę CMOS 4046. O tym układzie za chwilę.
Innym w miarę prostym i skutecznym rozwiązaniem jest wykorzystanie prostego generatora z bramkami, i zastąpienie rezystora wyznaczającego częstotliwość fotorezystorem. Ideę pokazuje rysunek 2.
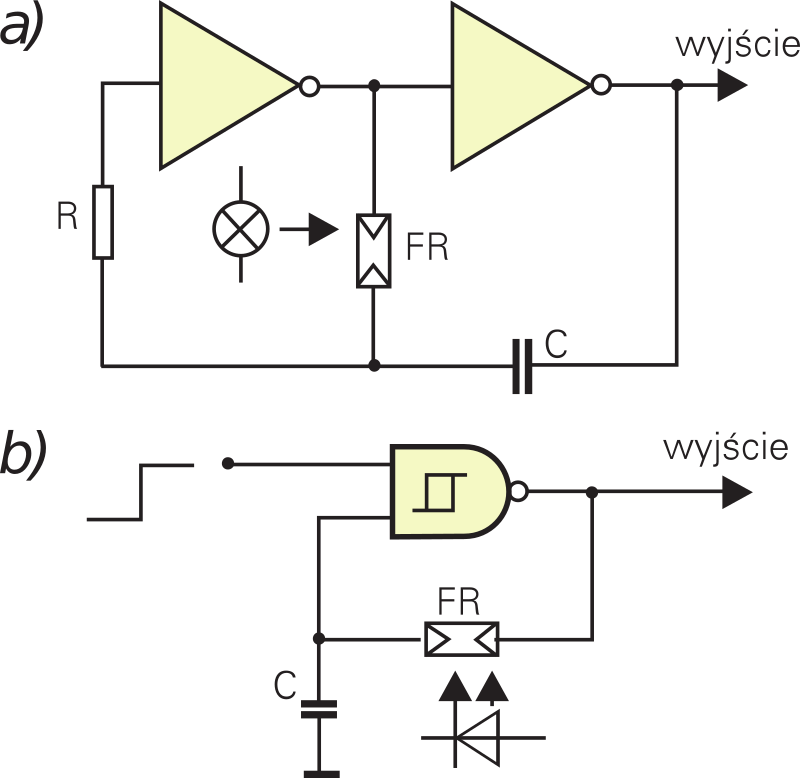
Rysunek 2
Ponieważ przy ładowaniu i rozładowaniu kondensatora przez (foto)rezystor prąd płynie w obu kierunkach, więc w tym układzie nie można zastosować wprost typowego transoptora z diodą LED i fototranzystorem lub fotodiodą. Właśnie konieczność budowy we własnym zakresie transoptora z fotorezystorem powoduje, że proste sposoby z rysunku 2 nie są popularnie w praktyce. Wprawdzie można spróbować wykorzystać zwykły transoptor z fototranzystorem i mostek diodowy wg rysunku 3, ale i ten w miarę tani sposób nie jest stosowany w praktyce.
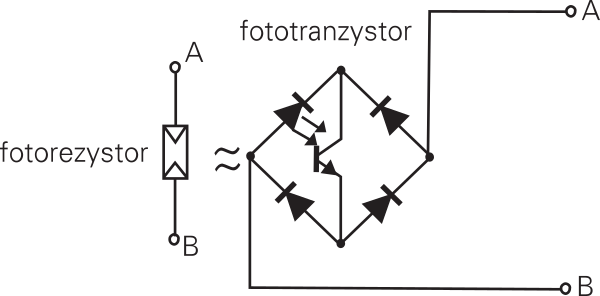
Rysunek 3
Po co „bawić się” z dodatkowymi elementami, gdy istnieje popularna i tania kostka 4046?
Dlatego raczej nie polecam ci żadnych prostych rozwiązań generatorów VCO z bramkami CMOS, bo takie rozwiązania mają liczne wady.
Zapoznaj się natomiast i zaprzyjaźnij z kostką 4046.
4. Generatory o zmiennym współczynniku wypełnienia. Częściej, niż ci się może wydaje, będziesz potrzebował generatorów o stałej częstotliwości i zmiennym współczynniku wypełnienia. Znasz już najprostsze rozwiązania z potencjometrem i diodami. Dwa przykładowe rozwiązania przypominam ci na rysunku 4.
Rysunek 4
Ale takie układy mają szereg wad. Po pierwsze, wypełnienie można zmieniać jedynie ręcznie; po drugie, częstotliwość nie jest stała, co w pewnych sytuacjach jest istotną wadą.
Może będziesz zdziwiony, ale nie zaproponuję ci tutaj wyłącznie układów typowo cyfrowych, opartych na układach CMOS.
W pewnych sytuacjach lepsze są inne rozwiązania.
Przede wszystkim powinieneś zrozumieć działanie układów z pięciu poniższych rysunków i przestać się ich bać. W praktyce tego typu rozwiązania stosuje się bardzo często, zwłaszcza w obwodach regulacji mocy czy w impulsowych przetwornicach napięcia.
Układ z rysunku 5 pozwala regulować współczynnik wypełnienia impulsu wyjściowego od zera do takiej wartości, jaką ma przebieg generatora G1.
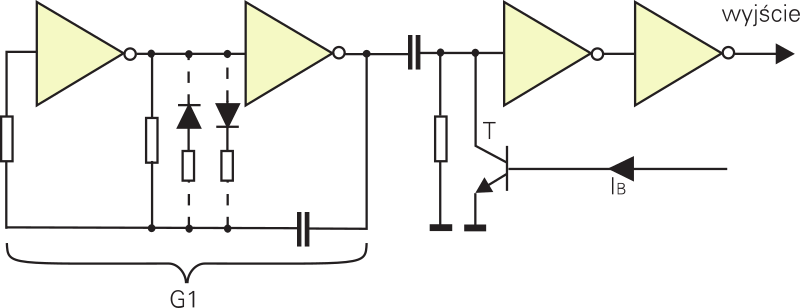
Rysunek 5
Zwykle przebieg generatora G1 ma współczynnik wypełnienia około 50%, ale przez dodanie rezystorów i diod (zaznaczonych linią przerywaną), można skorygować ten współczynnik w zakresie 5%…95%. W rezultacie cały układ może dać na wyjściu impulsy prostokątne o stałej częstotliwości i wypełnieniu zmienianym za pomocą zmian prądu bazy tranzystora T. W układzie można też zastosować tranzystor MOSFET i wtedy wielkością regulującą wypełnienie będzie napięcie na bramce tego tranzystora.
Uwaga! W tego typu układzie nie można stosować bramek z wejściem Schmitta, bo niemożliwe będzie uzyskanie współczynnika wypełnienia bliskiego zeru!
W praktyce spotyka się jeszcze inne sposoby wytwarzania przebiegu o współczynniku wypełnienia zmienianym za pomocą zewnętrznego napięcia. Dobrym rozwiązaniem jest wykorzystanie dwóch wzmacniaczy operacyjnych, z których jeden (U1) pracuje jako generator, a drugi (U2) jako układ porównujący – czyli komparator. Schemat takiego układu pokazany jest na rysunku 6.
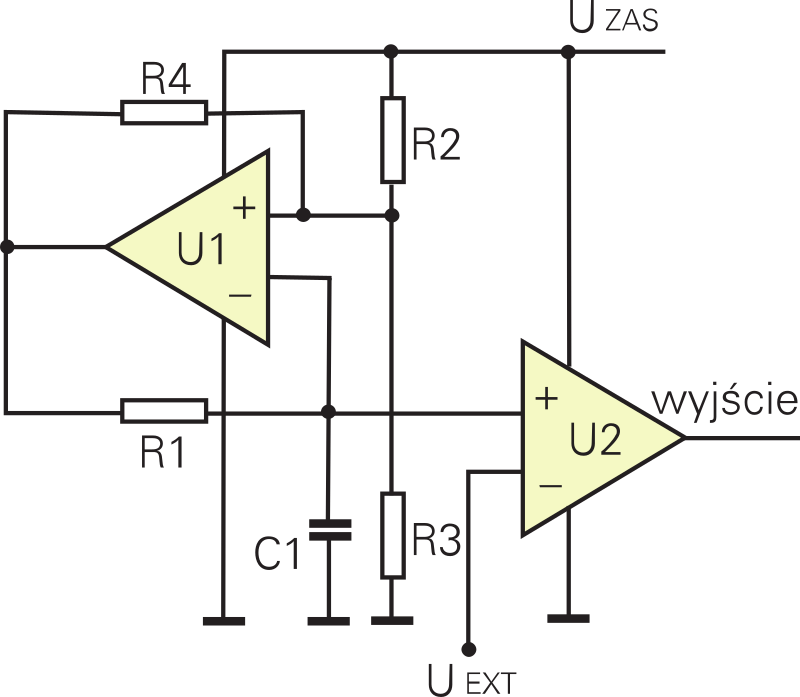
Rysunek 6
Na kondensatorze C1 występuje przebieg o kształcie zbliżonym do trójkątnego i częstotliwości zależnej od stałej czasowej R1C1. Komparator U2 porównuje chwilowe napięcie na kondensatorze C1 z zewnętrznym napięciem UEXT. Wypełnienie przebiegu wyjściowego można bez problemu zmieniać w pełnym zakresie od 0% do 100%.
Powinieneś wiedzieć, że amplituda przebiegu trójkątnego, a tym samym zakres napięć UEXT, dla których występuje regulacja, zależy od stosunku rezystancji R2 i R3 do R4. W konkretnych układach można więc dobrać potrzebny zakres napięć regulacji odpowiednio zmieniając wartość R4 (amplituda) oraz stosunek R2 i R3 (przesuwanie zakresu w górę lub w dół). Szczegóły wykraczają jednak poza ramy tego artykułu.
Teraz kolejne układy.
W niektórych układach, na przykład w obwodach fazowej regulacji mocy odbiorników zasilanych z sieci energetycznej 50 Hz, potrzebne są generatory synchronizowane częstotliwością sieci, dające na wyjściu przebieg o zmiennym współczynniku wypełnienia, czyli inaczej mówiąc, impulsy o regulowanym czasie trwania.
Najprostszym rozwiązaniem jest zastosowanie triaka, diaka i obwodu RC, ale taki sposób umożliwia tylko ręczną regulację.
W praktyce stosuje się odmiany układu pokazanego na rysunku 7 (szczerze mówiąc, należy się zastanowić, czy do takiego celu nie lepiej wykorzystać specjalizowany układ scalony, na przykład kostkę U2400 firmy Temic, która ma możliwość synchronizacji przebiegiem sieci, czy układy U208, U2008 przeznaczone do fazowego sterowania silnikami elektrycznymi).

Rysunek 7
Na rysunku 7a pokazano rozwiązanie, w którym przebiegiem synchronizującym jest pełne napięcie sieci 220 V. Rysunek 7b pokazuje układ, w którym przebieg synchronizujący bierze się z uzwojenia wtórnego transformatora.
W obu przypadkach potrzebne są obwody synchronizacji. Są to obwody zawierające tranzystory: T1…T4. W obu przypadkach obwody te zapewniają pełne rozładowanie kondensatora C1 w momencie przejścia napięcia sieci przez zero. Aż do przyjścia następnego impulsu zerującego, co nastąpi po 10 milisekundach, czyli jednym półokresie przebiegu sieci, kondensator C1 będzie się ładował przez rezystor R1. W zależności od wartości rezystora R1, a ściślej od wartości płynącego przezeń prądu, ładowanie kondensatora będzie szybsze lub wolniejsze. Tym samym współpracująca bramka (inwerter) będzie zmieniać stan swego wyjścia w różnych momentach.
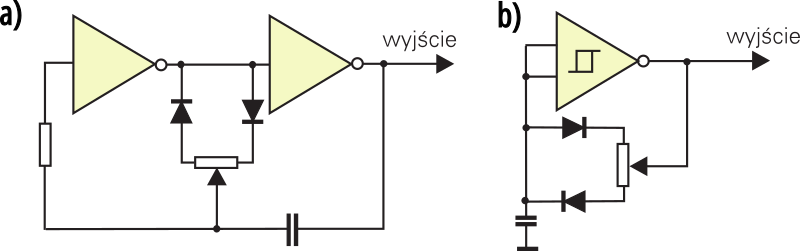
Układy z rysunku 7 też zawierają niewygodny do regulacji rezystor R1. Ale zauważ, że przez ten rezystor prąd zawsze płynie w jednym kierunku. Dzięki temu nie musi to być wcale rezystor – można zastosować automatyczną regulację, stosując zamiast rezystora R1 jedno z rozwiązań pokazanych na rysunku 8. Możliwość wykorzystania źródła prądowego z tranzystorem, transoptora, fototranzystora, itp., umożliwia sprzęgnięcie tego bloku regulacji z różnymi układami sterującymi.
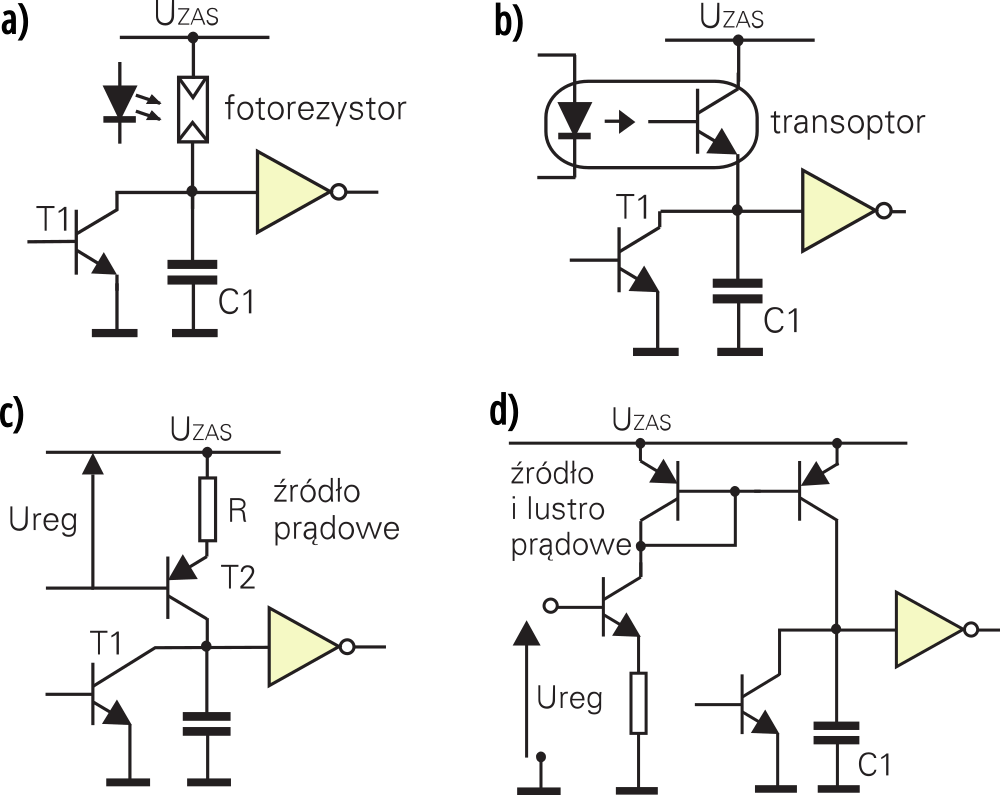
Rysunek 8
W praktyce często spotyka się też inny sposób regulacji współczynnika wypełnienia tak synchronizowanego przebiegu. Ideę pokazuje rysunek 9.
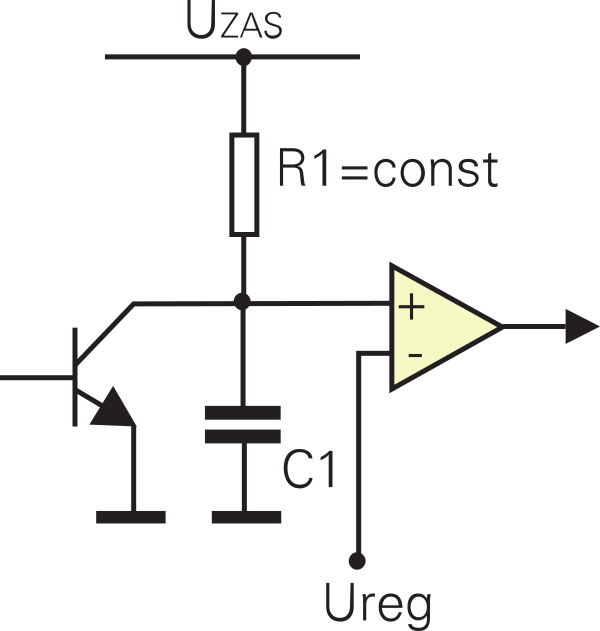
Rysunek 9
Tym razem rezystor R1 ma stałą wartość, tak dobraną, by przez okres między impulsami rozładowującymi kondensator zdążył się naładować do 60…90% napięcia zasilającego. Elementem decydującym o współczynniku wypełnienia jest teraz komparator, porównujący przebieg napięcia na kondensatorze C1 z napięciem UREG podawanym na drugie wejście komparatora. W tym rozwiązaniu wypełnienie przebiegu jest zależne wprost od napięcia UREG.
Zauważ, że w obu omówionych sposobach można uzyskać wypełnienie od zera do blisko 100%.
Przy częstotliwościach sieci, w roli komparatora może pracować wzmacniacz operacyjny. Ze względu na zakres napięć wejściowych dobrze jest zastosować układ, mogący pracować przy napięciach wejściowych bliskich zeru (ściślej biorąc – ujemnemu napięciu zasilania), na przykład LM358 czy LM324. Inne wzmacniacze, takie jak popularny układ 741, czy też TL06X…TL08X nie mogą pracować przy napięciach wejściowych bliskich ujemnemu napięciu zasilania, a więc nie będzie można uzyskać regulacji wypełnienia w całym podanym, szerokim zakresie.
Układy z rysunków: 6…9 podaję ci tylko dla informacji. Nie są to, ściśle rzecz biorąc, układy czasowe z układami CMOS (zawierają tranzystory i wzmacniacze operacyjne), ale bywają używane do współpracy z takimi układami.
Na rysunkach: 6…9 pokazałem ci tylko przykłady ilustrujące główne idee. W praktyce zarówno wartości elementów, jak i szczegółowy układ połączeń należy dobrać w zależności od konkretnych potrzeb, a niekiedy dodatkowo wzbogacić (najczęściej o obwód niewielkiej histerezy w układzie komparatora).
Tyle o układach generatorów. Teraz przystępujemy do przeglądu specjalizowanych układów scalonych, wykorzystywanych w układach czasowych, czyli generatorach i uniwibratorach.
Zanim to zrobimy, chciałbym zachęcić cię, byś nie podchodził do nie znanych ci kostek, jak przysłowiowy pies do jeża. Wiem z doświadczenia, że elektronicy (i nie tylko oni) obawiają się nowości, mają tendencję do stosowania tylko kostek bardzo dobrze sobie znanych, a unikania układów dotychczas nie stosowanych. Nie traktuj nieufnie opisanych dalej kostek jak „obcych, nieznanych, dalekich i wręcz podejrzanych”. Są to stare układy, opracowane jeszcze w latach siedemdziesiątych. Ogromna rzesza konstruktorów zdążyła się już z nimi dobrze zapoznać i je polubić.
Zapoznaj się z nimi i ty. Nawet jeśli nie będziesz pewny jakiejś funkcji układu, czy nie zrozumiesz dokładnie, jaką rolę pełni dane wyprowadzenie – nie rezygnuj! Układy te są dziś bardzo tanie i naprawdę nic nie stoi na przeszkodzie, byś praktycznie wypróbował daną kostkę. Nie obawiaj się, że od razu uszkodzisz delikatną strukturę CMOS. Wbrew pozorom, współczesne kostki CMOS nie są tak wrażliwe i podatne na uszkodzenia, jak sobie może wyobrażasz.
Spróbuj więc zaprzyjaźnić się z opisanymi dalej układami.
Zaczynamy od kostki CMOS 4060.
4060
Układ scalony 4060, zawiera wewnętrzny generator, oraz 14−bitowy dwójkowy licznik. Niestety, nie wszystkie wyjścia licznika są wyprowadzone (brak wyprowadzeń 1, 2, 3 i 11 wyjścia), co w niektórych sytuacjach jest istotną wadą. Pomimo to kostka ta jest bardzo często stosowana do wytwarzania przebiegów o długich i bardzo długich czasach. Warto pamiętać, że na końcówce C (nóżka 9) występuje niepodzielony sygnał generatora, który również można wykorzystać.
Rysunek 10 pokazuje w uproszczeniu wewnętrzną budowę układu i możliwości dołączania elementów zewnętrznych: obwodu RC lub rezonatora kwarcowego, a także rozkład wyprowadzeń.
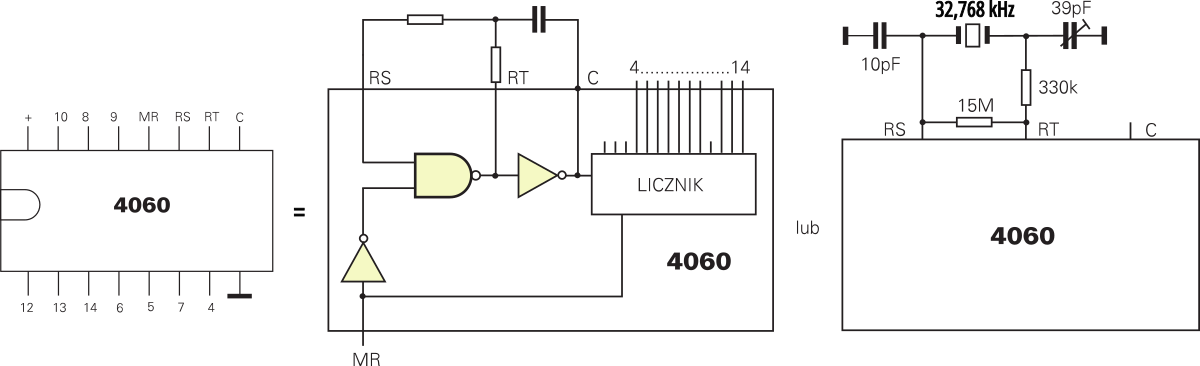
Rysunek 10
Częstotliwość generatora wyznaczają elementy RT i C, natomiast rezystor RS jest jedynie rezystorem pomocniczym, zabezpieczającym i jego wartość może wynosić: 10…100 kΩ. Wartości RT i C można zmieniać w szerokich granicach: 4,7 kΩ…10 MΩ, 100 pF…1 μF lub więcej, przy czym powinien być stosowany kondensator stały, nie elektrolit. Ze względu na stabilność nie zaleca się także kondensatorów ceramicznych ferroelektrycznych, czyli „ceramicznych lizaczków” o pojemności większej niż 1nF.
To chyba jest dla ciebie jasne, bo kilkakrotnie ci to tłumaczyłem już wcześniej.
Częstotliwość generatora trochę zależy od rezystancji RS, ale w pierwszym przybliżeniu możesz śmiało korzystać z uproszczonego wzoru:
![]()
Układ może być sterowany z zewnętrznego generatora, i wtedy przebieg trzeba podać na wejście RS (nóżka 11), pozostawiając końcówki: RT i C (nr 9 i 10) niepodłączone.
Powinieneś jeszcze znać działanie wejścia MR (Master Reset) – końcówka 12. Podanie na to wejście stanu wysokiego blokuje pracę generatora i zeruje licznik – na wszystkich wyjściach licznika wymusza stan niski.
Stan niski na wejściu MR zezwala na pracę układu, generator zaczyna pracować i na kolejnych wyjściach licznika z czasem pojawiają się impulsy o długości proporcjonalnej do stopnia podziału danego wyjścia.
Ponieważ 14−bitowy licznik zlicza do 16384, więc stosując w generatorze elementy RT i C, dające częstotliwość około 1 Hz (np. 1 MΩ 470 nF), uzyskasz na ostatnim, czternastym wyjściu licznika częstotliwość około 0,000056 Hz, co daje okres 17700 sekund, czyli 300 minut, czyli pięć godzin!
Uważaj teraz! Czy to znaczy, że na tym ostatnim wyjściu dodatni impuls będzie trwał pięć godzin?
Jak sądzisz?
Początkujący popełniają tu często błąd, uważając, że tak.
Zauważ, że to okres, czyli pełny cykl, będzie trwał te 5 godzin – po uruchomieniu licznika na ostatnim wyjściu najpierw przez 2,5 godziny będzie trwał stan niski, a dopiero potem na 2,5 godziny pojawi się stan wysoki, następnie na kolejne 2,5 godziny stan niski, a potem znów stan wysoki, itd.
Nie zapominaj o fakcie, że czas trwania dodatniego impulsu w takim liczniku jest o połowę krótszy od obliczonego okresu. Na sprawę tę natkniesz się też przy korzystaniu z kolejnego ciekawego układu – kostki 4541.
4541
Układ 4541 jest naprawdę uniwersalnym układem czasowym, umożliwiającym wytwarzanie fali prostokątnej i pojedynczych impulsów o długich i bardzo długich czasach.
Schemat blokowy kostki, pokazany na rysunku 11 może cię trochę przestraszyć. Ale w praktyce nie ma tu nic strasznego. Jak chcesz, zajrzyj do katalogu, żeby poznać dalsze szczegóły dotyczące tej kostki, ja celowo podaję ci tylko to, co niezbędne i co najczęściej wykorzystuje się w praktyce.
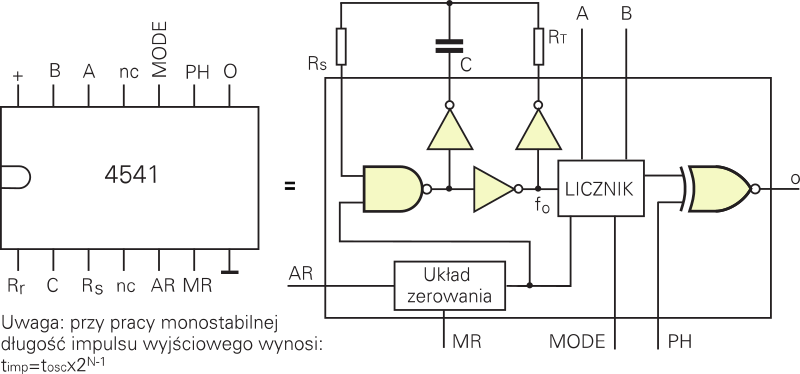
Rysunek 11
Elementy wyznaczające częstotliwość generatora dołączane są do końcówek: RT, C, RS (nóżki 1, 2 i 3). Jak zwykle RS ma wartość: 10…100 kΩ, natomiast RT i C można dobierać według potrzeb w szerokim zakresie, byleby tylko C był kondensatorem stałym.
Układ ma wbudowany licznik−dzielnik i tylko jedno wyjście O (końcówka 8).
Najpierw rozprawimy się z wejściem AR (nóżka 5).
Gdy jest ono zwarte do masy, po włączeniu napięcia zasilającego następuje automatyczne zerowanie (AR = Auto Reset). Ale pamiętaj, że zerowanie takie następuje tylko przy napięciach zasilania nie mniejszych niż 5 V. Jeśli więc napięcie zasilania wynosi co najmniej 5 V, śmiało możesz końcówkę 5 zewrzeć na stałe do masy i zupełnie o niej zapomnieć.
Powinieneś też wiedzieć, że gdy wejście AR jest zwarte do plusa zasilania, wtedy co prawda po włączeniu zasilania nie następuje automatyczne zerowanie, ale za to kostka może pracować przy znacznie niższych napięciach, w praktyce już od 2 V (co może być cenne, jeśli zasilasz układ jedną baterią litową 3 V), poza tym ma jeszcze bardziej zmniejszony pobór prądu – poniżej 1 μA (gdy AR=L pobór prądu też jest niewielki i wynosi kilkadziesiąt mikroamperów). Możesz więc równie dobrze dołączyć nóżkę 5 na stałe do plusa zasilania.
Jak z tego widzisz, w większości przypadków, końcówka AR może być podłączona dowolnie – albo do plusa zasilania, albo do masy i nie będzie to miało znaczenia dla działania układu (oczywiście nie możesz jej pozostawić niepołączonej).
Teraz parę słów o wejściu MODE (nóżka 10). Stan wysoki na tym wejściu (zwarcie do plusa zasilania) powoduje, że kostka pracuje jako generator astabilny, czyli po prostu generuje falę prostokątną o wypełnieniu 50%.
Gdy wejście MODE jest zwarte do masy, układ staje się generatorem monostabilnym, czyli po pobudzeniu wytwarza jeden impuls o określonej długości.
Częstotliwość, czy też czas przebiegu na wyjściu zależy od częstotliwości generatora i stopnia podziału wewnętrznego programowanego licznika.
Tu też sprawa jest beznadziejnie prosta: w zależności czy potrzebujesz wytwarzać falę prostokątną, czy pojedynczy impuls, odpowiednio łączysz wejście MODE.
A teraz końcówka zerująca MR (Master Reset) – nóżka 6.
Przy pracy astabilnej sprawa jest beznadziejnie prosta – stan wysoki na wejściu MR blokuje pracę generatora i wewnętrznego licznika−dzielnika. Może więc po prostu służyć jako wejście bramkujące, sterujące pracą układu.
Przy pracy monostabilnej sprawa jest tylko odrobinę trudniejsza. Stan wysoki na MR również zatrzymuje pracę wszystkich wewnętrznych układów. Uważaj! Podanie stanu niskiego na MR rozpoczyna cykl pracy, czyli wytwarzanie jednego impulsu. O jego czasie trwania powiem ci za chwilę.
Muszę ci dokładniej wytłumaczyć zasadę działania i przebiegi czasowe w trybie monostabilnym, bo wielu (nie tylko początkujących) użytkowników gubi się w tym miejscu.
Zanim przejdziemy do szczegółów, dwa słowa o wejściu PH (PHASE), oznaczanym także Q/Q\ (czytaj: ku, nie ku).
Wejście to wprowadzono dla wygody użytkownika. Uważaj (i może naucz się tego na pamięć): stan wejścia PH określa, jaki stan logiczny występuje na wyjściu O w czasie i tuż po zerowaniu. To jest kluczowa, bardzo zresztą prosta zasada, którą musisz rozumieć. Dlatego zadam ci pytanie testowe:
Jaki stan wystąpi na wyjściu O (nóżka 9), gdy wejście PH (nóżka 10) jest połączone z masą, a na wejściu MR (nóżka 6) występuje stan wysoki?
Oczywiście, układ jest zerowany przez MR, więc na wyjściu będzie się utrzymywał stan niski, bo PH=L. Wszystko jasne! W takiej sytuacji w trybie pracy astabilnej, po podaniu na wejście MR stanu niskiego, nadal na wyjściu O będzie się utrzymywał stan niski, potem pojawi się stan wysoki, potem znów niski, itd. Z jaką częstotliwością?
Sprawa jest prosta.
Częstotliwość generatora RC możesz obliczać ze znanego już wcześniej wzoru:
![]()
W praktyce raczej oblicza się po prostu czas cyklu, czyli okres:
![]()
Częstotliwość generatora RC jest dzielona w programowanym liczniku. Stopień podziału licznika możesz wybrać z wartości: 256, 1024, 8192, 65536, ustawiając odpowiednio stany logiczne na je− go wejściach programujących A i B (nóżki 12 i 13). Pomoże ci tabelka:
| A | B | stopień podziału | licznik dzieli przez: |
| 0 | 0 | 213 | 8192 |
| 0 | 1 | 210 | 1024 |
| 1 | 0 | 28 | 256 |
| 1 | 1 | 216 | 65536 |
W praktyce prawie zawsze wykorzystuje się najwyższy stopień podziału, czyli po prostu zwiera się nóżki: 12 i 13 do plusa zasilania.
Zauważ, że po zastosowaniu elementów RT C o wartościach np. 2,2 MΩ, 1 μF uzyskasz częstotliwość generatora około 0,2 Hz, czyli okres 5 sekund. Po podziale przez 65536 uzyskasz okres przebiegu ponad 92 godziny, czyli prawie cztery doby! To jest coś – dłuższych czasów raczej nie będziesz potrzebował!
Teraz wracamy do pracy monostabilnej.
Wiesz już, że wejście PH określa stan wyjścia O w czasie, i tuż po zerowaniu, a cykl pracy zaczyna się po pojawieniu się stanu niskiego na wejściu MR. Czy już potrafisz odpowiedzieć na pytanie, co dzieje się na wyjściu w trybie pracy monostabilnej?
Zwróć uwagę, że to nie podanie stanu wysokiego na wejście MR rozpoczyna cykl pracy, ale usunięcie stanu wysokiego z tego wejścia. To w praktyce oznacza, że czas trwania impulsu na wyjściu jest równy sumie czasu trwania stanu H na wejściu MR, jak i czasu wyznaczonego przez generator i licznik. W pewnych sytuacjach jest to wielką zaletą, w innych wadą.
Jeśli tego do końca nie rozumiesz, przeanalizuj rysunek 12, na którym pokazałem ci różne przebiegi na wejściu MR i wyjściu O dla różnych stanów wejścia PH, oczywiście przy pracy monostabilnej.
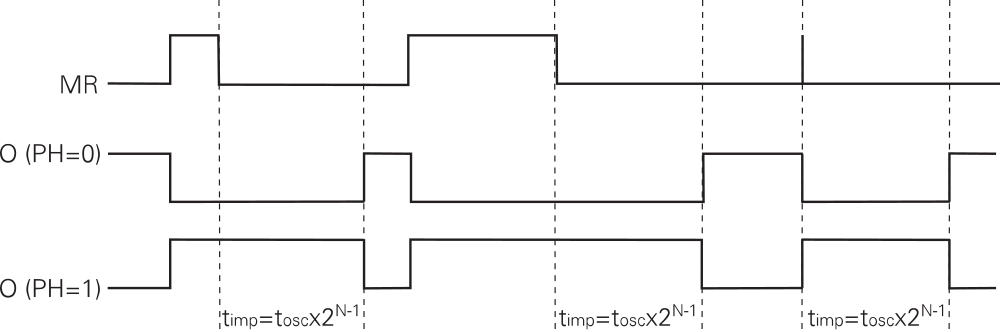
Rysunek 12
Być może chciałbyś, by cykl pracy rozpoczynał się w momencie pojawienia się stanu wysokiego na wejściu MR. Nic trudnego: wystarczy na tym wejściu dodać układ różniczkujący R1C1, pokazany na rysunku 13. Wystarczy, by stała czasowa RC tego obwodu była większa niż 1 μs. Wtedy impuls wyjściowy będzie praktycznie równy czasowi wyznaczonemu przez RT, C i stopień podziału licznika, a niezależny od czasu trwania stanu wysokiego na wejściu MR. Właśnie przy sterowaniu wejścia MR krótkimi impulsami dodatnimi (które zwykle nazywa się impulsami szpilkowymi lub po prostu szpilkami) uzyskuje się pracę układu jako typowego przerzutnika monostabilnego.
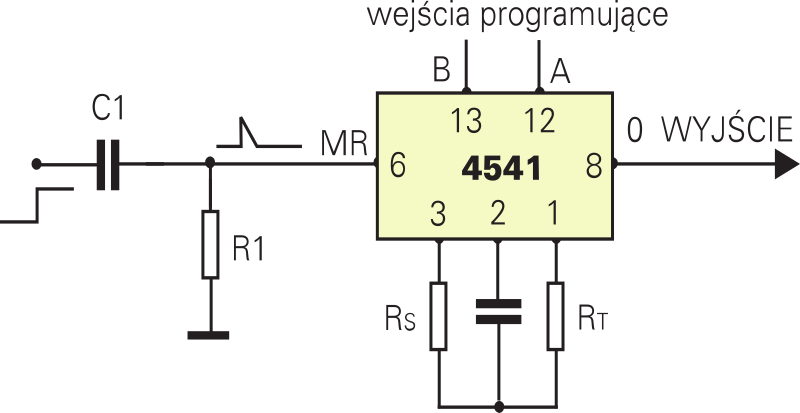
Rysunek 13
Chciałbym ci jednak zwrócić uwagę, że choć przebiegi podane na rysunku 12 mogą się ci wydać nieinteresujące i niepotrzebne, nie lekceważ ich – często właśnie takie sposoby sterowania przerzutnika monostabilnego są wręcz idealne do układów opóźniających.
Przy okazji jedna uwaga: gdy wejście AR=L, cykl pracy przerzutnika monostabilnego rozpoczyna się po włączeniu zasilania – może to czasem wykorzystasz w praktyce.
I jeszcze jedno: podane w tabelce stopnie podziału dotyczą generatora astabilnego. Jeśli wykorzystujesz kostkę w roli przerzutnika monostabilnego, wytwarzającego pojedynczy impuls, albo bloku opóźniającego, czas impulsu, czy czas opóźnienia jest…
no powiedz sam…
Tak! O połowę krótszy od czasu wynikającego z pomnożenia:
2,3×RT×C×stopień podziału podany w tabeli.
Ta sprawa wyszła już nam przy omawianiu licznika 4060.
Dlatego w trybie pracy monostabilnej (MODE=L), przy zaprogramowaniu najwyższego stopnia podziału (A i B=H), czas impulsu lub opóźnienia wyniesie:
Ttot = (2,3×RT×C)×215 = (2,3×RT×C)×16384=37700×RT×C
Zauważ, że uzyskiwany współczynnik podziału licznika dwójkowego wynosi 15, a nie 16, jak było w układzie generatora astabilnego.
Choć na pierwszy rzut oka wykorzysta− nie kostki 4541 może ci się wydać trudne, w rzeczywistości tak nie jest. Wystarczy dołączyć elementy: RT C i RS, wejścia: AR, MODE, PH, A i B połączyć do masy lub plusa zasilania, i ewentualnie wykorzystać wejście MR do sterowania – naprawdę nic trudnego.
Spróbuj sam i od tej pory, jeśli masz wykonać generator albo układ czasowy o długim czasie trwania impulsu, nie kombinuj z elektrolitami o dużej pojemności, tylko wykorzystaj kostkę 4541. To naprawdę jest bardzo proste!
A kolejny odcinek cyklu znajdziesz tutaj.
Piotr Górecki