

PKE – Praktyczny Kurs Elektroniki (16) Stabilizator temperatury
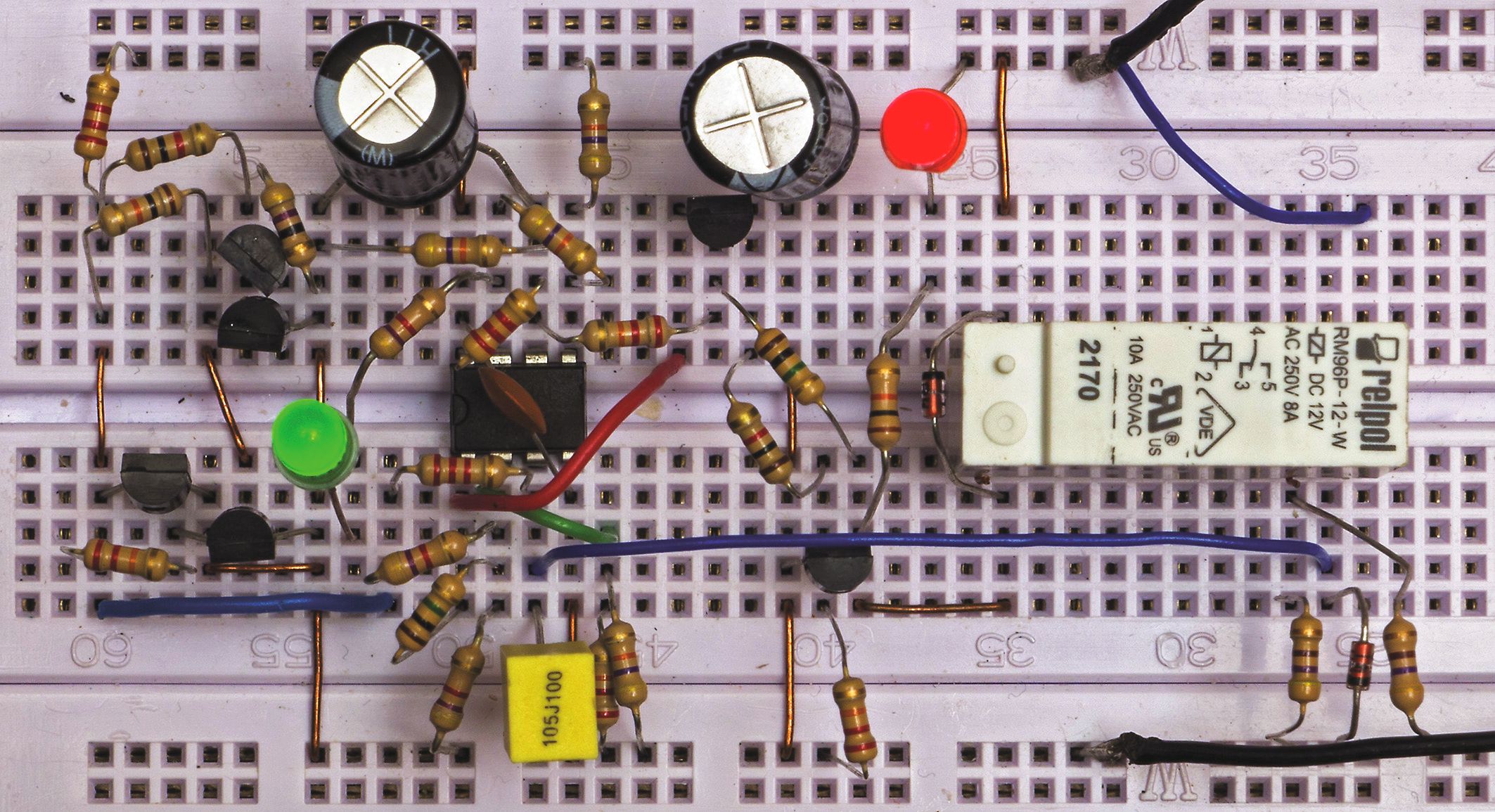
Na fotografii wstępnej pokazany jest ulepszony układ regulatora/stabilizatora temperatury. W wykładzie 8 projektem wstępnym był prosty termostat – regulator temperatury. Zrealizowaliśmy go na kilku tranzystorach i przekonaliśmy się, jak ważną sprawą jest wprowadzenie histerezy, która polepsza działanie układu. Teraz rozumiemy, że zwiększanie histerezy z jednej strony ma dobroczynne skutki, bo likwiduje wpływ zewnętrznych zakłóceń, ale z drugiej strony pogarsza dokładność regulacji. Dlatego zbudujemy ulepszony regulator o znacznie lepszych właściwościach stabilizacyjnych.
Schemat blokowy pokazany jest na rysunku A, a pełny schemat ideowy na rysunku B.
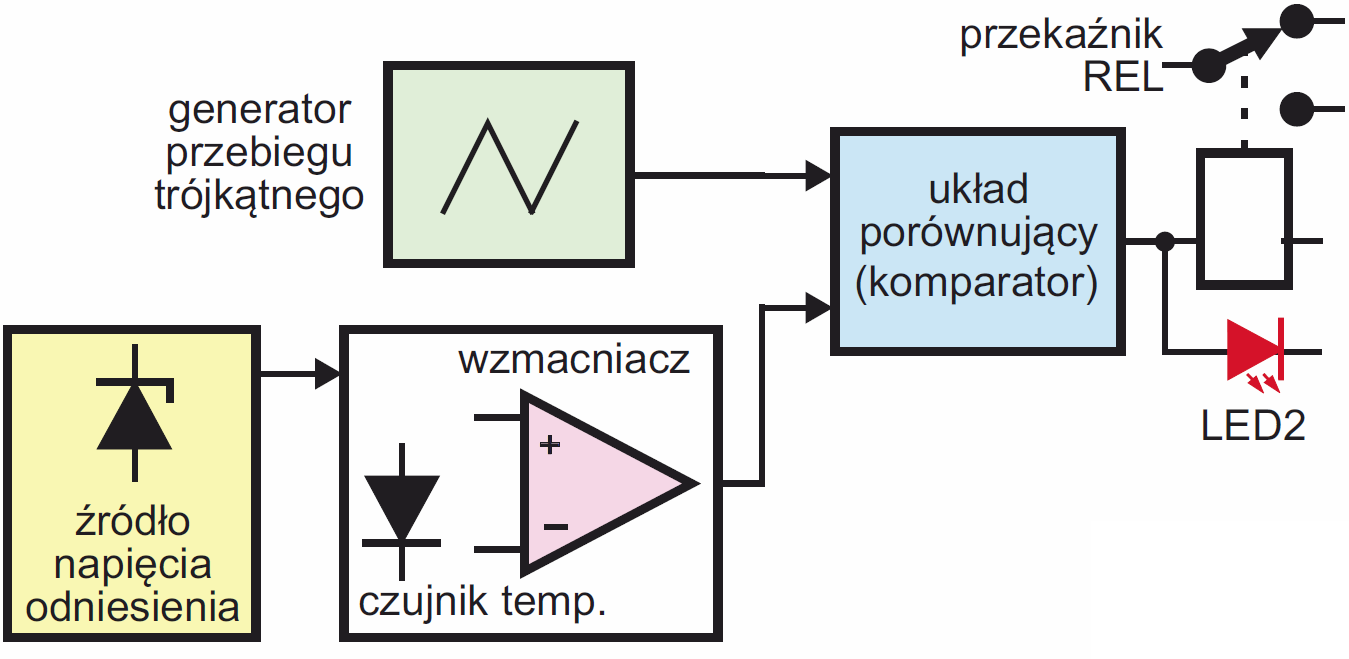
Rysunek A
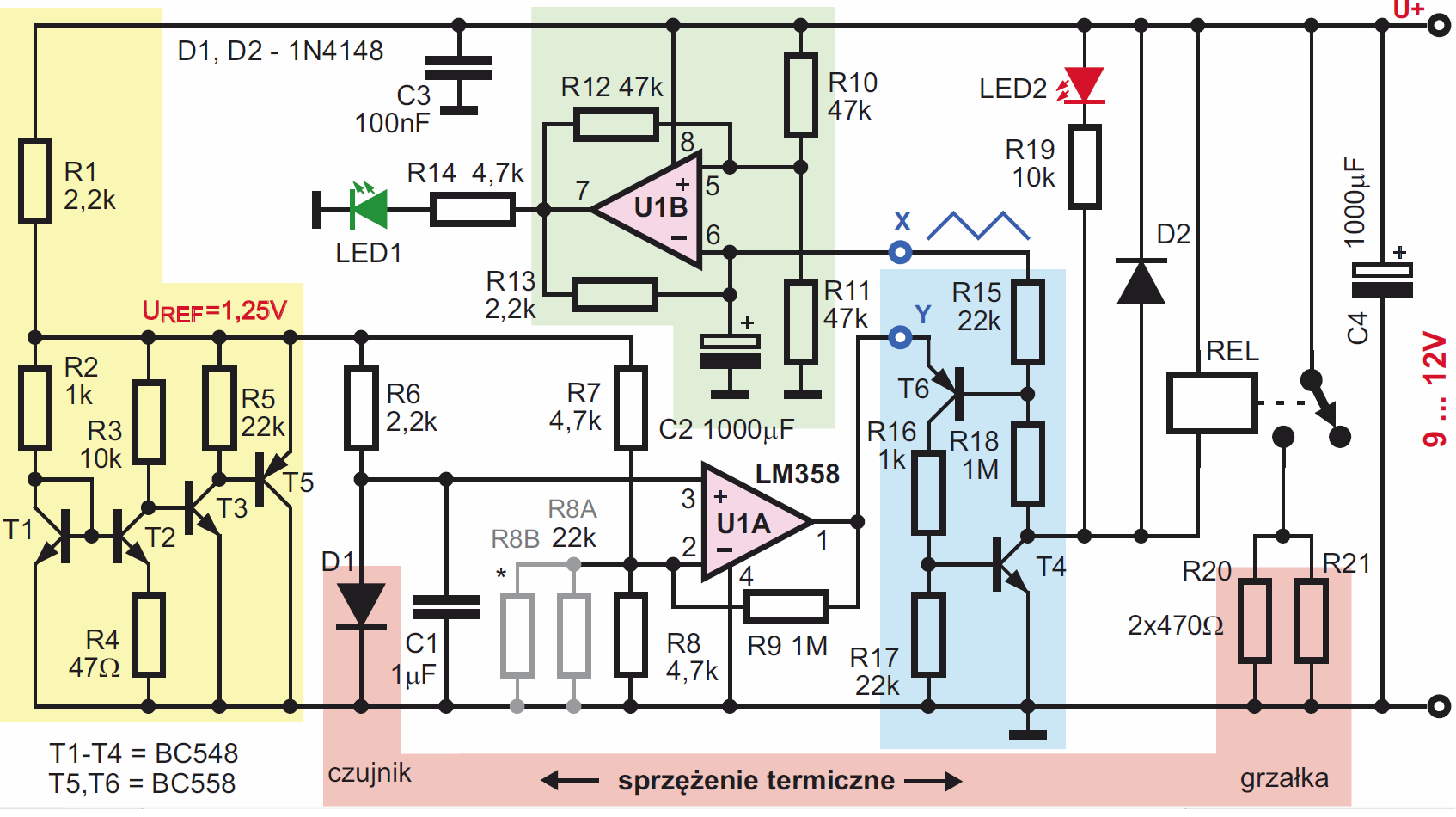
Rysunek B
Dla ułatwienia analizy poszczególne bloki zostały wyróżnione kolorowymi podkładkami. Układ U1A silnie wzmacnia zmiany napięcia z diody D1, która odgrywa rolę czujnika temperatury. Zieloną podkładką wyróżniony jest generator. Żółta podkładka wyróżnia źródło napięcia odniesienia, czyli rodzaj stabilizatora napięcia (1,25 V). Niebieska podkładka wyróżnia komparator, czyli układ porównujący, który steruje przekaźnikiem REL. W naszym modelu funkcję grzałki pełnią dwa rezystory o nominale 470 omów. Biała podkładka na rysunku A wskazuje, że czujnik D1 i grzałka są sprzężone termicznie, czyli umieszczone tak, by ciepłe rezystory podgrzewały diodę. Moją realizację tego zadania widzisz na fotografii C.
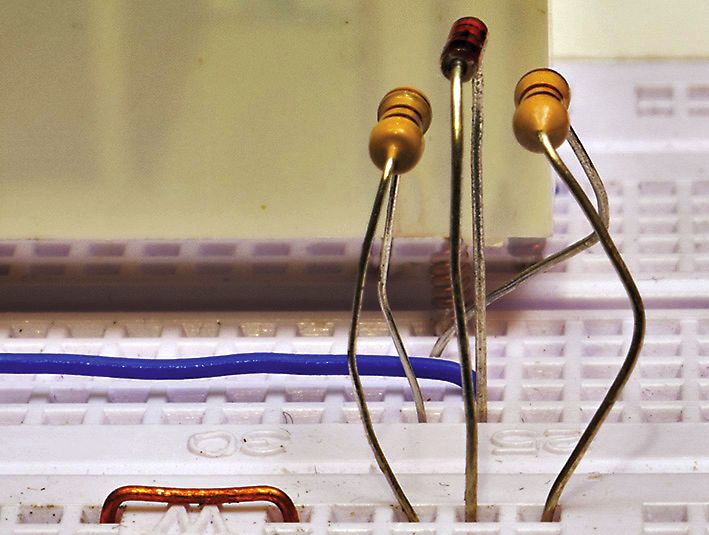
Fotografia C
Gdy zbudujesz taki układ, zielona kontrolka LED1 będzie regularnie zaświecać się na niecałą sekundę i gasnąć też na niecałą sekundę. Pokazuje ona rytm pracy regulatora. Natomiast świecenie czerwonej diody LED2 zależy od temperatury czujnika temperatury D1. Wraz z zaświecaniem diody LED2 zostaje też włączony przekaźnik REL, który steruje grzałką. Gdy czujnik D1 jest zimny, dioda LED2 świeci ciągle i grzałka jest włączona na stałe. Gdy temperatura rośnie, dioda LED2 i przekaźnik pracują w rytmie przerywanym. Czym wyższa temperatura, tym na krótszy czas jest włączana dioda LED2 i grzałka. Gdy temperatura jest zdecydowanie za wysoka, dioda LED2, przekaźnik i grzałka zostają całkowicie wyłączone. W „strefie pośredniej” grzałka włączana jest na czas mniejszy niż okres pracy generatora. Uzyskujemy przez to możliwość płynnej regulacji mocy średniej, choć grzałka sterowana jest dwustanowo.
Pożądaną temperaturę naszego stabilizatora będziemy ustawiać, zmieniając wartość rezystancji R8. Ściślej biorąc, nie będzie to jeden rezystor, tylko kilka połączonych równolegle. Zadanie nie jest trudne, ale trzeba trochę poeksperymentować. Na początek NIE MONTUJ grzałki, czyli rezystorów R20, R21.
Z rezystorem R8 o wartości 4,7 kΩ, a bez R8A, R8B, czerwona dioda LED2 będzie wygaszona. Równolegle do R8 trzeba dołączyć jak największą dodatkową rezystancję, żeby LED2 zaświeciła.
Najlepiej byłoby dobrać wypadkową rezystancję R8||R8A||R8B tak, żeby czerwona dioda LED2 świeciła prawie cały czas i gasła tylko na ułamek sekundy. W praktyce będzie to trudne. Dioda LED2 może świecić cały czas, ale podgrzanie palcami czujnika D1 powinno ją zgasić.
W moim modelu trzeba było dołączyć równolegle do R8 rezystory R8A=22 kΩ i R8B=47 kΩ. U Ciebie, z uwagi na rozrzut parametrów, zapewne też trzeba będzie dodać rezystor R8A=22 kΩ i jeszcze jeden lub dwa o większym nominale. W każdym razie trzeba sprawić, żeby lampka LED2 świeciła cały czas lub prawie cały czas.
Gdy po takim ustawieniu regulatora ogrzejesz palcami diodę D1, dioda LED2 będzie gasnąć na dłużej, przy silniejszym ogrzaniu czujnika D1 przestanie świecić, a przekaźnik w ogóle nie będzie włączany. Podczas prób rezystor R13 może mieć wartość 1 kΩ lub 2,2 kΩ, a potem możesz go zwiększyć do 4,7 kΩ.
Jeżeli po takiej regulacji dołączysz rezystory grzałki R20, R21 w pobliżu czujnika D1, to otrzymasz termostat – stabilizator temperatury. Ja swój model zasilałem napięciem 12 V z zasilacza stabilizowanego i grzałkę z powodzeniem zrealizowały dwa rezystory po 470 omów. Ty, jeśli chcesz wypróbować taki termostat, też powinieneś raczej zasilić układ ze źródła o wydajności prądowej większej, niż mały 9-woltowy bloczek. Może to być 6 baterii alkalicznych LR6 (AA), a jeszcze lepiej, gdy będzie to zasilacz stabilizowany 9 V…12 V. Przy zasilaniu napięciem 9 V w roli grzałki możesz wykorzystać dwa do czterech równolegle połączonych rezystorów 220-omowych (przy czterech prąd grzałki wyniesie ponad 160 mA i sumaryczna moc grzania około 1,5 W). Przy zasilaniu 12 V można wykorzystać dwa do czterech rezystorów 470 Ω i będzie to grzałka mocy 0,6…1,2 W. Oczywiście taka „grzałka” powinna być umieszczona w pobliżu czujnika temperatury D1.
Opis układu dla „zaawansowanych”
Wpływ wahań napięcia zasilającego usunięty jest przez to, że obwód pomiarowy z diodą D1 i rezystorami R6–R8 jest zasilany stabilnym napięciem ze źródła napięcia odniesienia. Z konieczności w modelu wykorzystaliśmy prymitywną, niedoskonałą wersję stabilizatora szeregowego, zwanego bandgap, która daje napięcie UREF=1,25 V. Zrealizowaliśmy ją na tranzystorach T1 – T3, T5 (natomiast w praktycznie użytecznym regulatorze zastosowalibyśmy scalony stabilizator bandgap, np. LM385 1,2 V).
Jak wiemy, napięcie przewodzenia diody krzemowej zmienia się pod wpływem temperatury, a współczynnik cieplny wynosi około –2 mV/°C. Zmiany napięcia diody D1 są wzmacniane przez układ U1A. Wzmocnienie jest bardzo duże, wyznaczone przez stosunek rezystancji R9 do wypadkowej rezystancji równoległego połączenie R7||R8, która wynosi około 2 kΩ, przez co wzmocnienie wynosi około 500, czyli na wyjściu wzmacniacza U1A napięcie zmienia się aż o około 1 V/°C. Tak duże wzmocnienie ustawiłem tylko dlatego, żeby łatwo było zaobserwować działanie tego regulatora/ stabilizatora.
W związku z dużym wzmocnieniem starannie trzeba też dobrać wartości rezystorów R8A, R8B. Gdybyśmy mieli potencjometr, zastosowalibyśmy wzmacniacz według idei z rysunku D i potencjometrem ustawilibyśmy potrzebną temperaturę stabilizacji.
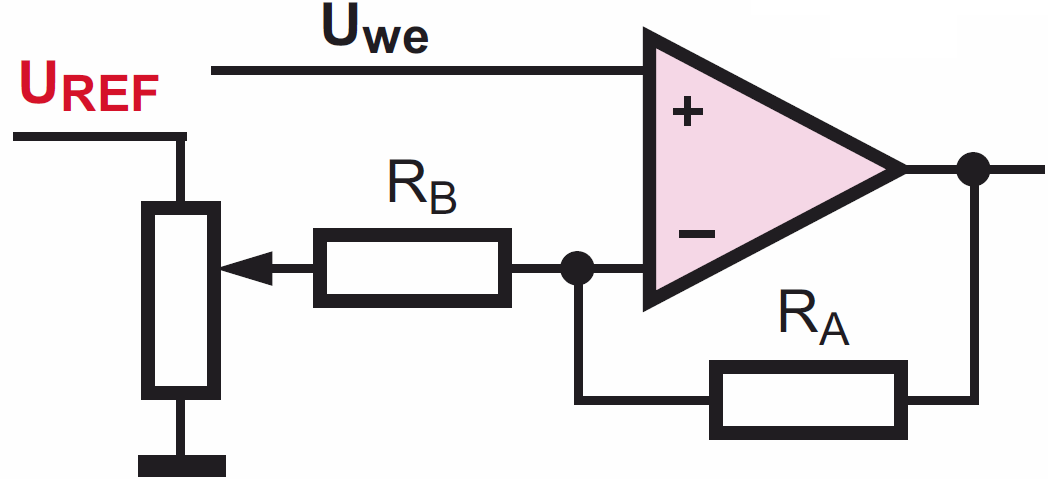
Rysunek D
W każdym razie w punkcie oznaczonym Y występuje napięcie stałe, które zmniejsza się wraz ze wzrostem temperatury. W najprostszym regulatorze dwustanowym napięcie z punktu Y wykorzystalibyśmy do sterowania tranzystora wykonawczego T4 i przekaźnika REL. W naszym dokładniejszym regulatorze porównujemy napięcie z punktu Y z przebiegiem trójkątnym z punktu X. Przebieg podobny do trójkąta wytwarzany jest przez generator z układem U1B. Komparatorem, czyli układem porównującym, jest zasadniczo tranzystor T6. Na jego bazę podawane jest napięcie trójkątne o wartości międzyszczytowej około 3,4 Vpp. O tym, czy i kiedy będzie on przewodził, decydują więc napięcia w punktach X, Y. Jeżeli temperatura zmniejsza się, napięcie w punkcie Y, czyli na emiterze T6, rośnie. Gdy jest bliskie dodatniej szyny zasilania, tranzystor T6 przewodzi cały czas. Wtedy ciągle przewodzi też T4, działa przekaźnik REL i świeci LED2.
Gdy z kolei temperatura jest za wysoka, napięcie w punkcie Y jest bliskie masy, tranzystor T6 jest stale zatkany, podobnie T4. Gdy napięcie w punkcie Y jest „w strefie pośredniej”, tranzystor T6 jest włączany na część cyklu. Następuje płynna regulacja współczynnika wypełnienia impulsów. Rysunek E pokazuje przebiegi w punkcie X i na bazie T4.
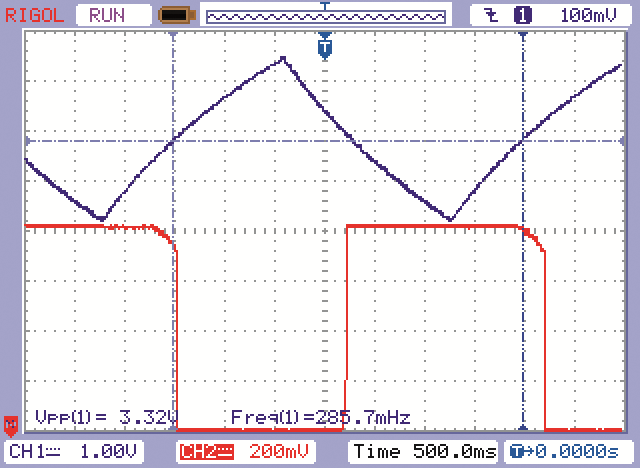
Rysunek E
W układzie komparatora dodany jest rezystor R18 o dużej wartości, przez co układ przypomina trochę strukturę tyrystorową. Rezystor R18 wprowadza słabiutkie dodatnie sprzężenie zwrotne, przez co otrzymujemy komparator z niewielką histerezą eliminującą wrażliwość na niewielkie zakłócenia. Szczegółowe omówienie kluczowych bloków jest przedstawione dalej w wykładzie.
W takim regulatorze zmiany temperatury czujnika płynnie zmieniają współczynnik wypełnienia (PWM – Pulse Width Modulation) impulsów sterujących grzałką, od zera do ciągłego włączenia. Podczas pracy termostatu ustali się takie wypełnienie impulsów, a tym samym średnia moc grzałki, by temperatura była równa pożądanej. Regulator z taką płynną regulacją mocy grzania może stabilizować temperaturę znacznie dokładniej niż badana wcześniej wersja dwustanowa z wykładu 8.
Poznajemy elementy i układy elektroniczne
W dwóch poprzednich odcinkach poznaliśmy i wykorzystywaliśmy wzmacniacze operacyjne, pracujące albo w konfiguracji odwracającej, nieodwracającej, albo jako wtórniki. Omówmy teraz dwa układy pracy tych wzmacniaczy, w pewnym sensie nietypowe. Przypomnijmy, że w zdecydowanej większości zastosowań podczas normalnej pracy napięcia na obu wejściach są praktycznie jednakowe (z dokładnością do napięcia niezrównoważenia), co jest efektem działania ujemnego sprzężenia zwrotnego. W niektórych przypadkach jest inaczej.
Komparator – układ porównujący. Wzmacniacz operacyjny reaguje na różnicę napięć między wejściami, więc gdy w układach z rysunku 1 na jedno wejście podajemy napięcie odniesienia (referencyjne), stan wyjścia zależy od tego czy napięcie wejściowe UA jest niższe, czy wyższe od napięcia odniesienia UREF.
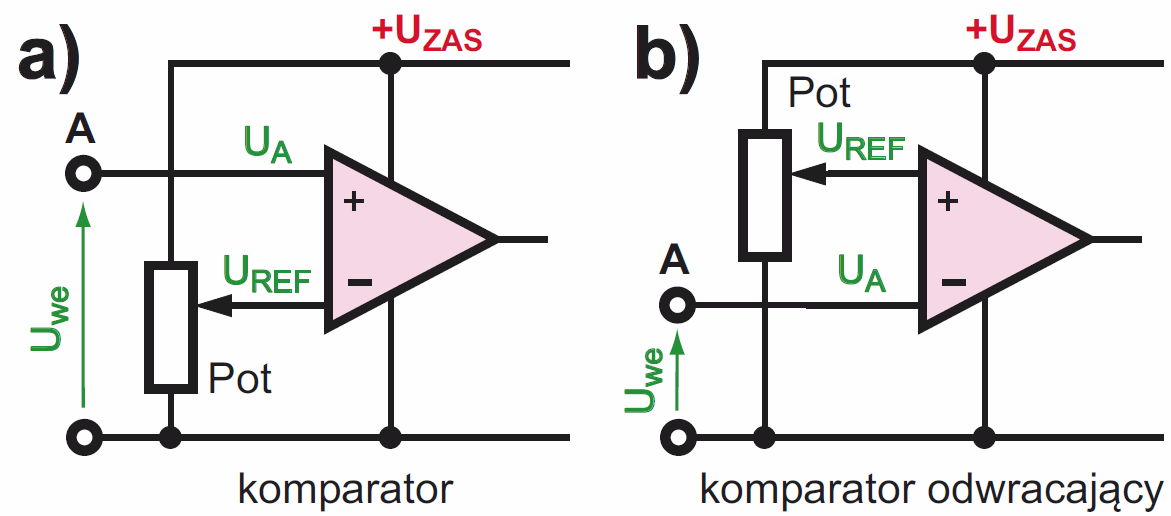
Rysunek 1
W związku z ogromnym wzmocnieniem, praktycznie nie ma „strefy przejściowej”, tylko na wyjściu otrzymujemy jeden z dwóch stanów: „wysoki” albo „niski”. Rezystancja wejściowa komparatora jest bardzo duża, wyznaczona przez wielkość prądów polaryzacji wejść.
Taki prosty układ porównujący bywa pożyteczny, jednak ogólnie biorąc, wzmacniacze operacyjne nie są optymalizowane do pracy w roli komparatora. Istnieją specjalizowane układy scalone, zwane komparatorami, podobne do wzmacniacza operacyjnego, ale przeznaczone właśnie do porównywania napięć. Natomiast chcąc wykorzystać wzmacniacz operacyjny w roli komparatora, trzeba upewnić się i zadbać, by napięcia wejściowe mieściły się w zakresie dopuszczalnym dla danego wzmacniacza. Podanie na wejścia napięć spoza dopuszczalnego zakresu może skutkować różnymi przykrymi niespodziankami, m.in. tzw. inwersją, czyli zamianą funkcji wejść. Ograniczeniem jest nie tylko dozwolony zakres wspólnych napięć wejściowych, ale też dopuszczalna wielkość napięcia różnicowego (między wejściami), dla niektórych wzmacniaczy wynosząca kilka woltów, a dla nielicznych tylko ±0,5 V. Otóż w niektórych popularnych wzmacniaczach, np. NE5532, NE5534, OP27, OP37, między wejściami włączone są dwie diody ochronne, na rysunku 2 wyróżnione różową podkładką, których obecność utrudnia pracę w roli komparatora.
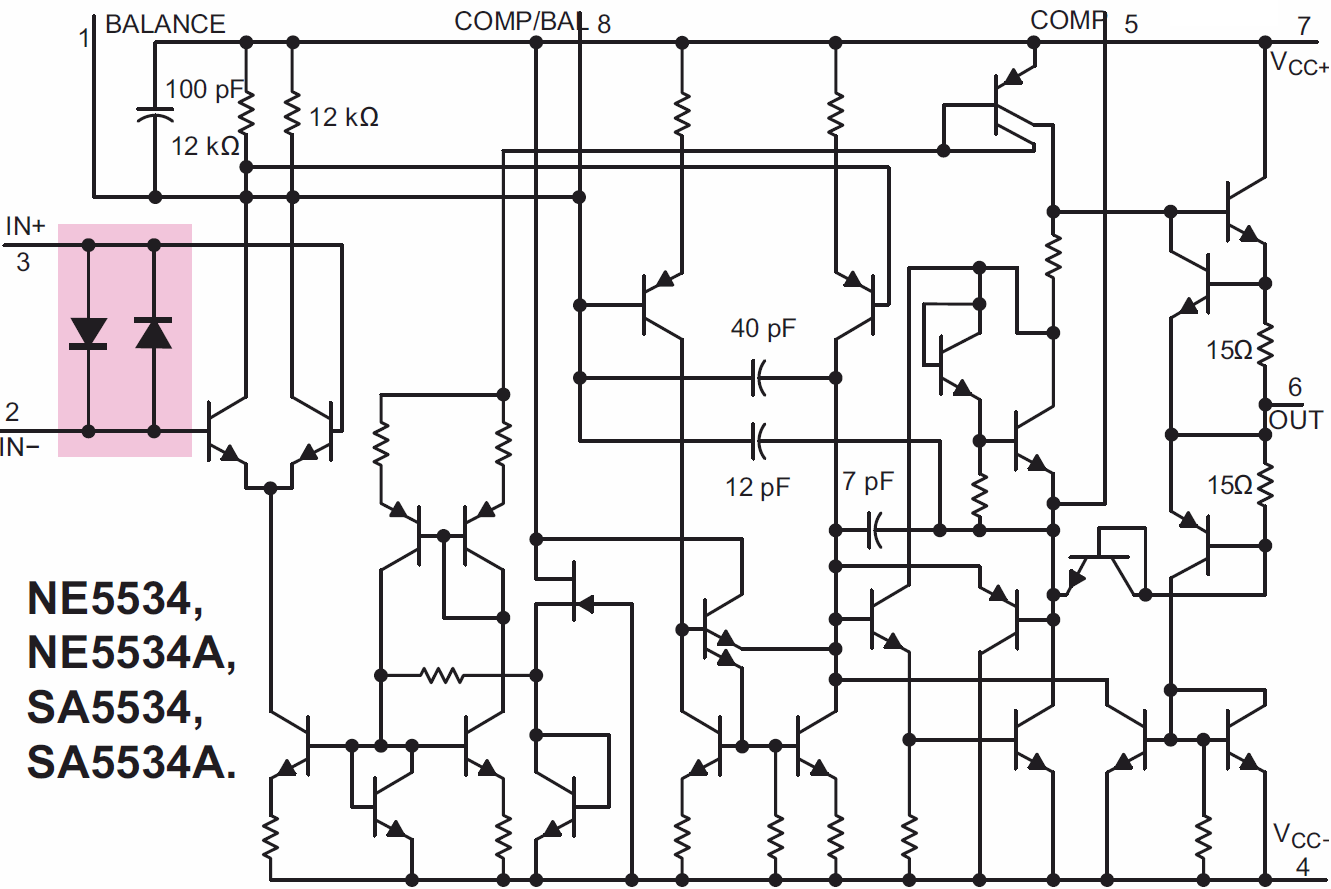
Rysunek 2
W naszym wzmacniaczu LM358 takich ograniczeń nie ma, a napięcie różnicowe między wejściami może sięgnąć nawet ±30 V, wejścia mogą prawidłowo pracować od poziomu ujemnego napięcia zasilania, ale nie mogą pracować „w pobliżu dodatniej szyny zasilania” (co najmniej 1,2…1,5 V poniżej dodatniej szyny zasilania).
Czasem potrzebny jest tzw. komparator okienkowy, który ma stwierdzić, czy napięcie wejściowe mieści się w wyznaczonych granicach. Przykład komparatora (dyskryminatora) okienkowego pokazany jest na rysunku 3. Czerwona dioda LED świeci, gdy napięcie wejściowe UA wykroczy poza „okienko” UL…UH, czyli gdy jest mniejsze od UL albo większe od UH.
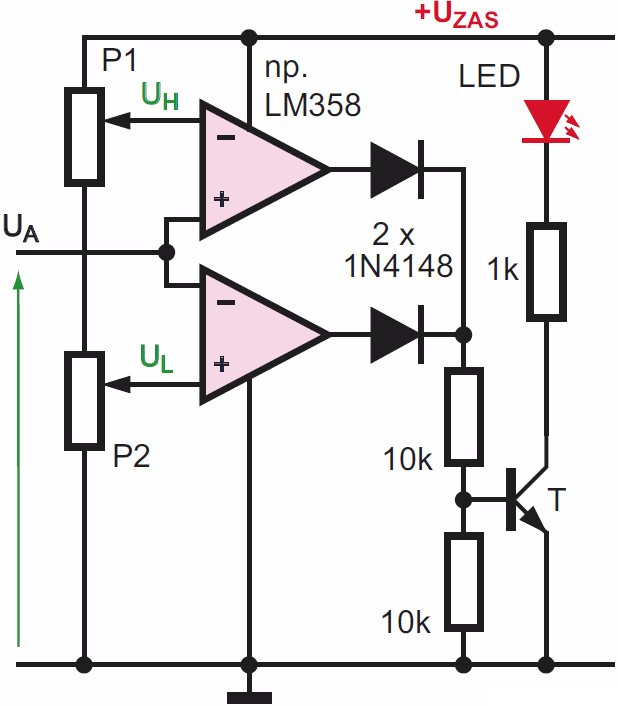
Rysunek 3
W praktycznych warunkach pracy, wskutek nieuchronnych zakłóceń zewnętrznych i szumów, „goły” komparator według rysunku 1 będzie niestabilnie pracować przy powolnych zmianach napięcia w pobliżu progu przełączania (UREF) – wtedy na wyjściu mogą się pojawiać drgania. Doświadczaliśmy już czegoś takiego w wykładzie ósmym przy testach regulatora temperatury. Aby uniezależnić się od omawianych wcześniej zewnętrznych zakłóceń, dodajemy do komparatora obwód dodatniego sprzężenia zwrotnego, zapewniający histerezę, czyli realizujemy…
Przerzutnik Schmitta. Sposób jest bardzo prosty – wystarczą dwa rezystory według rysunku 4a lub rysunku 4b. Wielkość histerezy – rysunek 4c – wyznaczona jest przez stosunek rezystorów R1/R2 i wielkość skoku napięcia wyjściowego (w uproszczeniu wartość całkowitego napięcia zasilania). W praktyce wartość R1 jest dużo większa od R2 i wtedy histereza jest niewielka, często rzędu miliwoltów. Zagadnienie to było już omawiane w wykładzie 8 przy okazji rysunków 12…15.
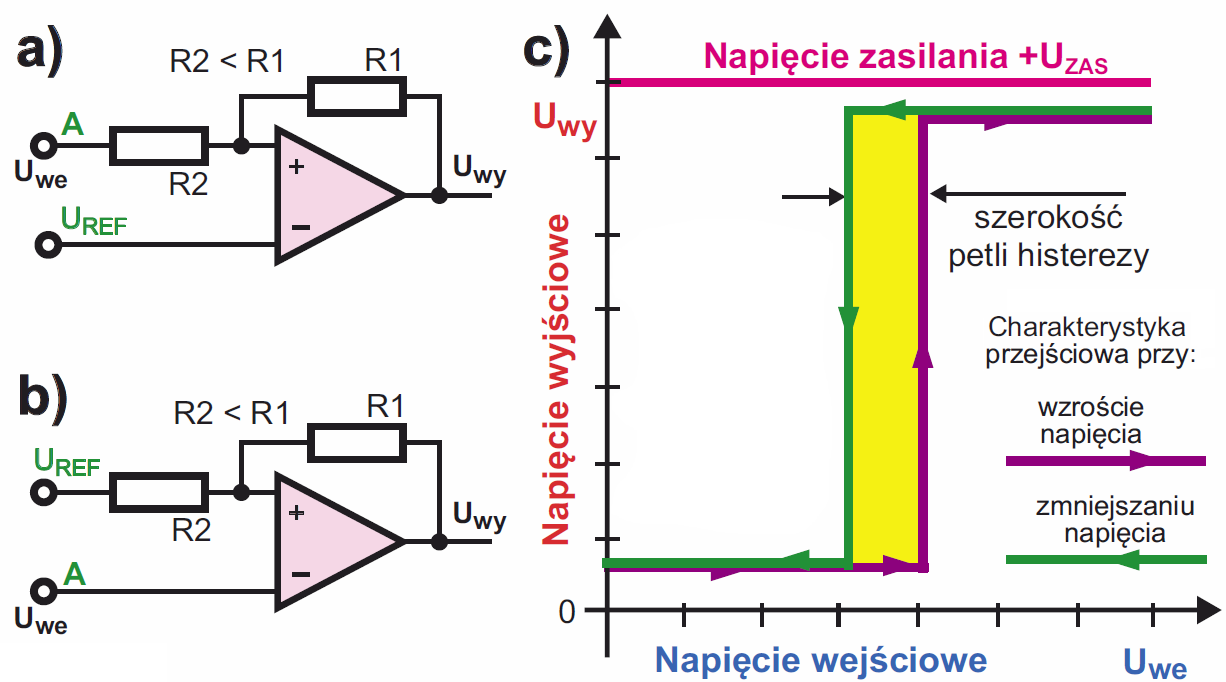
Rysunek 4
W projekcie tytułowym nie wykorzystaliśmy takiej wersji przerzutnika Schmitta.
Generator. Jeżeli do przerzutnika Schmitta z rysunku 4 dodamy obwód RC w obwodzie ujemnego sprzężenia zwrotnego według rysunku 5, to otrzymamy generator.
Rysunek 5
Jego częstotliwość określa zarówno stała czasowa RC, jak też wielkość histerezy (czym mniejsza histereza, tym większa jest częstotliwość pracy i przebieg bardziej przypomina trójkąt). Rysunek 6 i fotografia 7 pokazują generator płynnie przestrajany za pomocą fotorezystora, gdzie zmiany natężenia oświetlenia powodują zmiany częstotliwości.
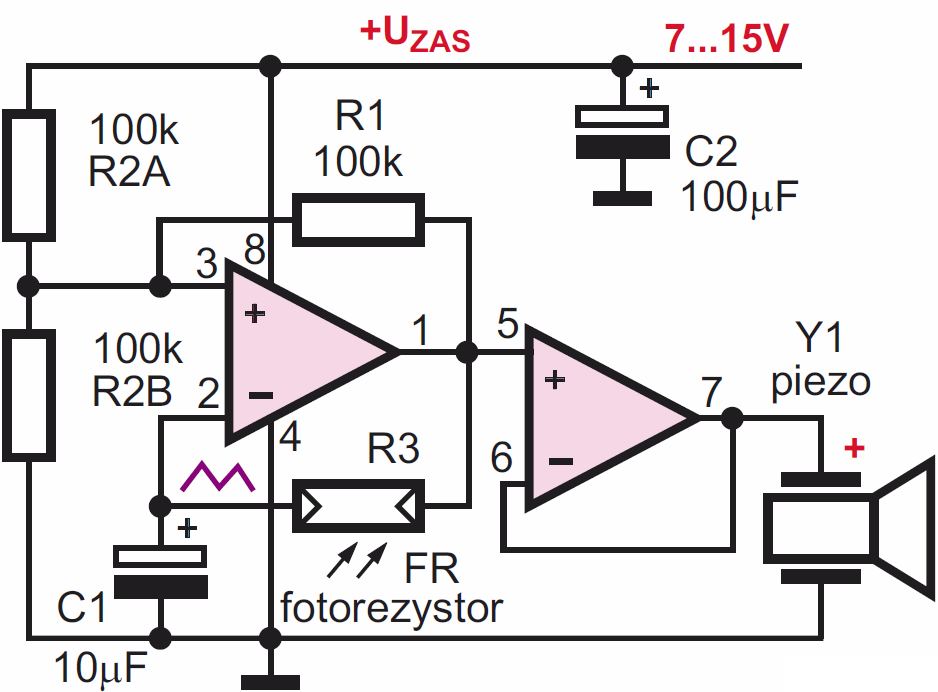
Rysunek 6
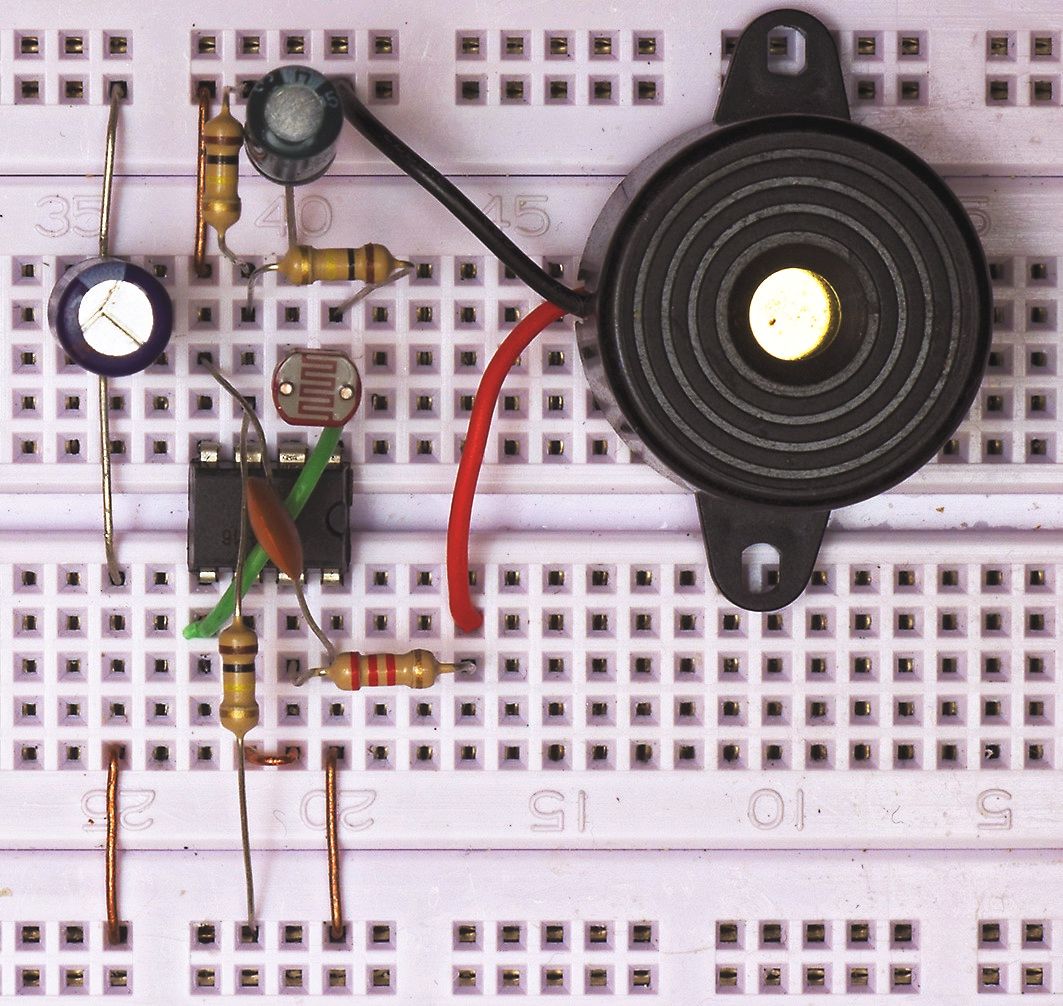
Fotografia 7
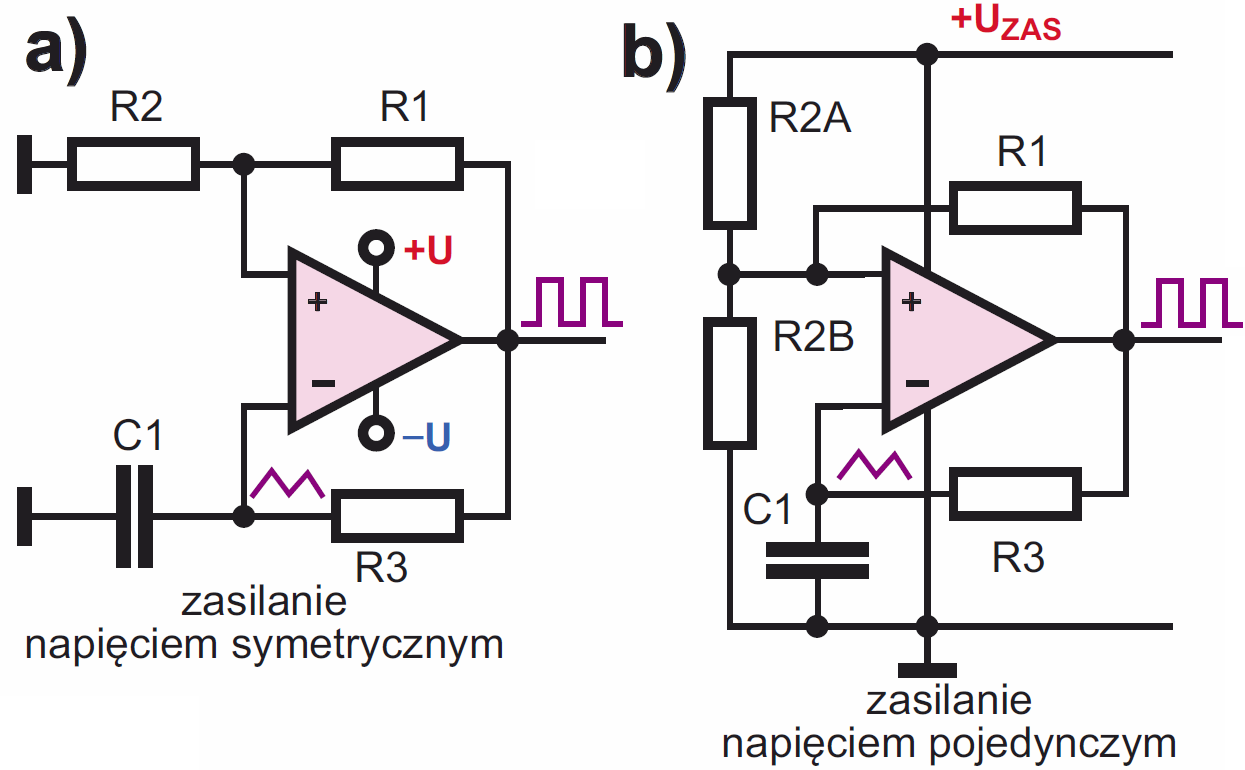
Rysunek 8 pokazuje dwa przykłady praktycznego generatora tego typu zasilanego napięciem symetrycznym.
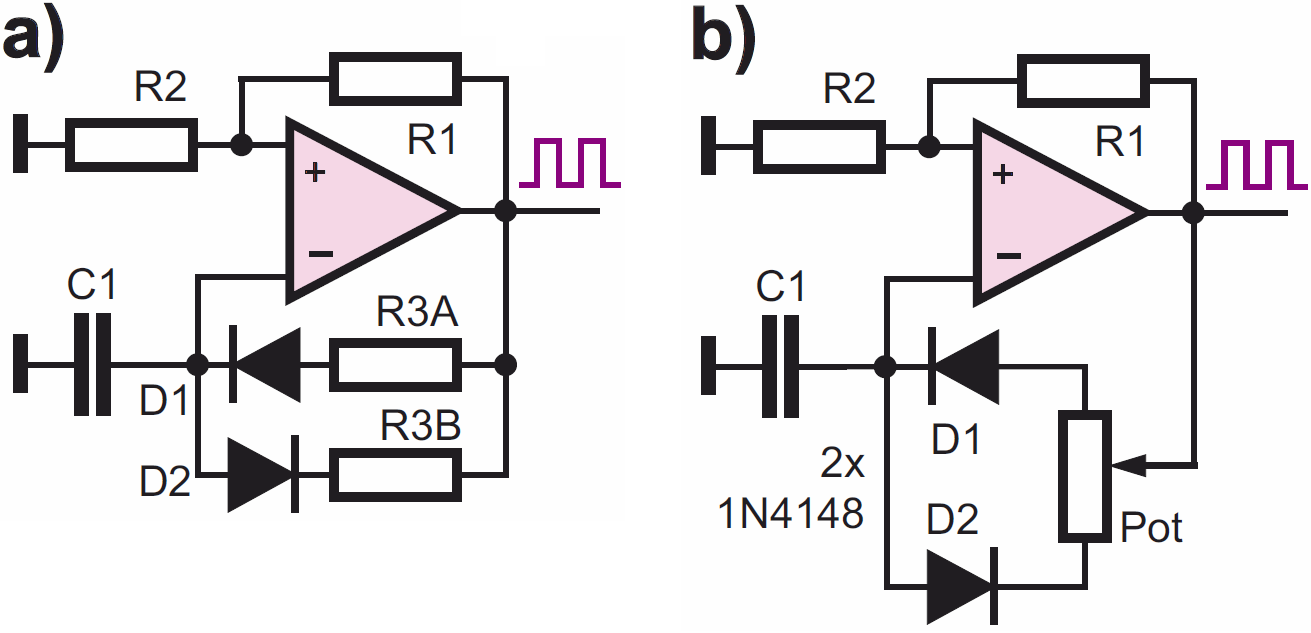
Rysunek 8
Rezystory R3A i R3B, a w drugiej wersji potencjometr P1 pozwala regulować czas trwania stanu wysokiego i niskiego. Maksymalna częstotliwość pracy takich generatorów jest ograniczona przez szybkość zmian na wyjściu wzmacniacza operacyjnego (parametr SR). Na powolnej kostce LM358 można realizować generatory o częstotliwości od 0,001 Hz do co najwyżej 10 kHz. W praktycznie użytecznym generatorze tego typu należałoby zastosować dużo szybszy wzmacniacz.
A oto kolejny temat praktyczny, wiążący się ze wzmacniaczami operacyjnymi. Otóż w układzie tytułowego regulatora temperatury dodaliśmy na pozór dziwny obwód z tranzystorami T1–T3, T5. Jest to bardzo prosty i niedoskonały układ źródła napięcia wzorcowego, znany jako tzw. bandgap reference.
Wiesz już, że napięcie baza-emiter (UBE) w tranzystorze (rysunek 9a) maleje ze wzrostem temperatury – współczynnik cieplny jest ujemny i wynosi około –2 mV/°C, zależnie od wartości prądu. Jednak generalnie w półprzewodnikach występuje też, co prawda w niezbyt widocznej postaci, zależność UT=kT/q, gdzie napięcie UT jest wprost proporcjonalne do temperatury bezwzględnej T (wyrażonej w kelwinach), czyli napięcie UT ma dodatni współczynnik cieplny. Zależność tę możemy wykorzystać, jeśli mamy dwa tranzystory, pracujące w jednakowej temperaturze, ale przy różnej gęstości prądu w złączach. W znanym nam lustrze prądowym z rysunku 9b, przy różnicy prądu obu tranzystorów (I1 >> IC), na rezystorze RE występuje małe napięcie URE (do kilkudziesięciu miliwoltów) o dodatnim współczynniku cieplnym. Jeżeli ze wzrostem temperatury napięcie na RE wzrasta, to wzrasta też prąd IE. A to oznacza, że zarówno przez RE, jak też przez RC, płynie prąd, który ma dodatni współczynnik cieplny (często oznaczany PTAT – Proportional To Absolute Temperature). Prąd ten płynie przez rezystor RC, a więc napięcie URC ma dodatni współczynnik cieplny. Dobierając odpowiednio prądy oraz RC/RE, możemy uzyskać napięcie URC o dodatnim współczynniku cieplnym około +2 mV/°C, co skompensuje ujemne zmiany cieplne napięcia UBE. Dodając napięcia na URC i UBE o przeciwnych współczynnikach cieplnych, otrzymujemy niezależne od temperatury napięcie o wartości około 1,2…1,25 V. W najprostszym przypadku układ mógłby wyglądać jak na rysunku 9c.
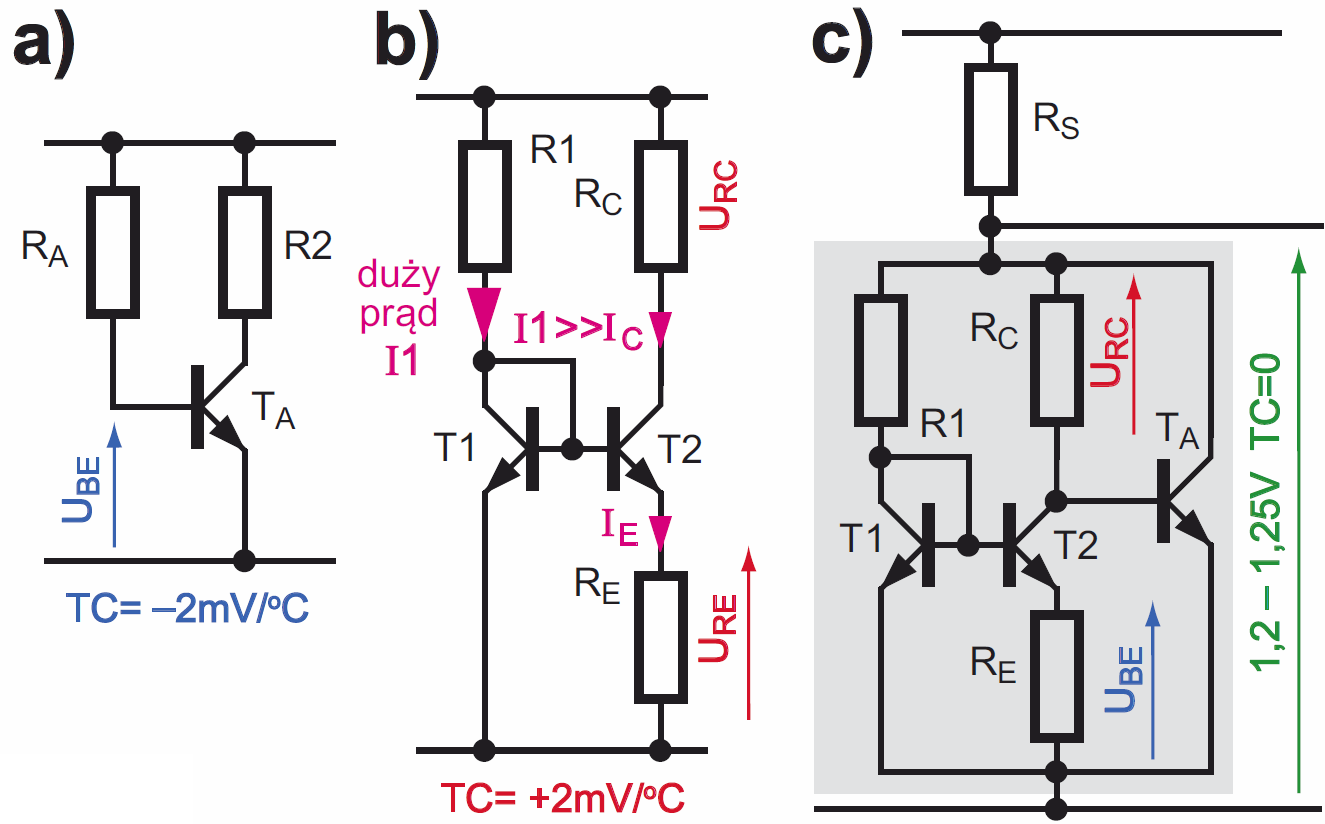
Rysunek 9
W rzeczywistości tego rodzaju stabilne źródła napięcia odniesienia są budowane jako układy scalone, by wszystkie tranzystory miały jednakową temperaturę, a dla dalszej poprawy parametrów ich schematy wewnętrzne są znacznie bardziej rozbudowane. Rysunek 10 przedstawia (nieco uproszczony) schemat wewnętrzny pierwszego scalonego stabilizatora bandgap, czyli układu LM113, a rysunek 11 pokazuje schematy aplikacyjne wspomnianych już w wykładzie 4, na ilustracji 11, popularnych układów tego typu LM385 oraz regulowanego TL431.
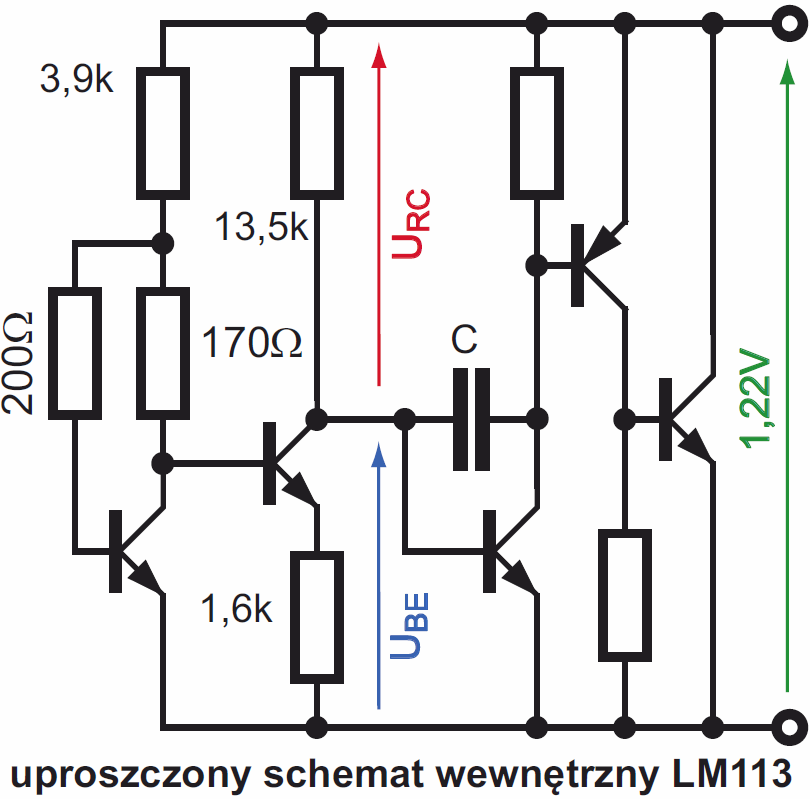
Rysunek 10
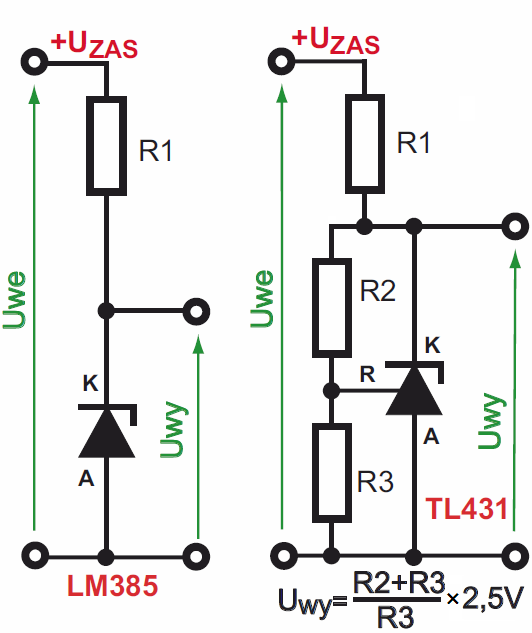
Rysunek 11
W praktycznej realizacji tytułowego regulatora temperatury koniecznie należałoby zastosować tego rodzaju scalone źródło napięcia odniesienia, bowiem układ zrealizowany z pojedynczych elementów na pewno nie będzie miał wymaganej stabilności.
A oto dwa kolejne ważne zagadnienie. Otóż często trzeba mierzyć małe napięcia, występujące na małych rezystancjach na tle dużych napięć, które nas nie interesują.
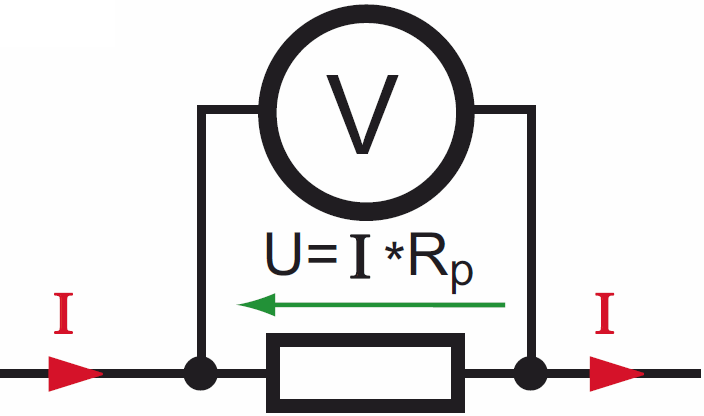
Układ Kelvina. Aby zmierzyć prąd, z reguły mierzymy spadek napięcia na rezystancji według rysunku 12 (inną metodą pomiaru prądu jest pomiar za pomocą tzw. czujnika Halla – hallotronu, pola magnetycznego wytwarzanego przez ten prąd wokół przewodu, ale to odrębny, szeroki temat).
Rysunek 12
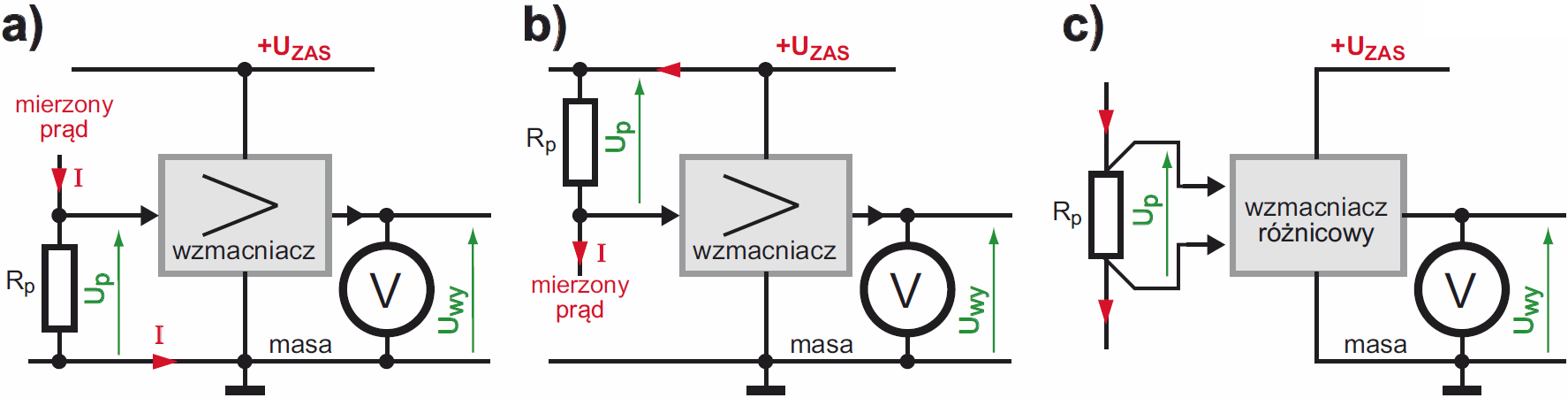
W powszechnie wykorzystywanym sposobie według rysunku 12 najlepiej byłoby, gdyby rezystancja pomiarowa RP była jak najmniejsza i by spadek napięcia na niej też był jak najmniejszy, by obecność rezystora pomiarowego jak najmniej wpływała na pracę monitorowanego układu. Mając do dyspozycji wzmacniacze, możemy zastosować rezystor RP o bardzo malej rezystancji i wzmocnić występujące na nim napięcie. Sposób z rysunku 13a wydaje się prosty i oczywisty. Jednak często trzeba mierzyć mały spadek napięcia „od strony plusa” (ang. high side), według rysunku 13b, a wynik pomiaru ma być dostępny względem masy (miernik dołączony do masy). Ponadto z uwagi na niezerowe rezystancje ścieżek i przewodów, należałoby mierzyć napięcie bezpośrednio na rezystorze pomiarowym RP, co ilustruje rysunek 13c. I to jest koncepcja pomiaru czteropunktowego, zwanego połączeniem Kelvina. Do takich pomiarów nie wystarczy zwykły wzmacniacz – potrzebny jest wzmacniacz różnicowy.
Rysunek 13
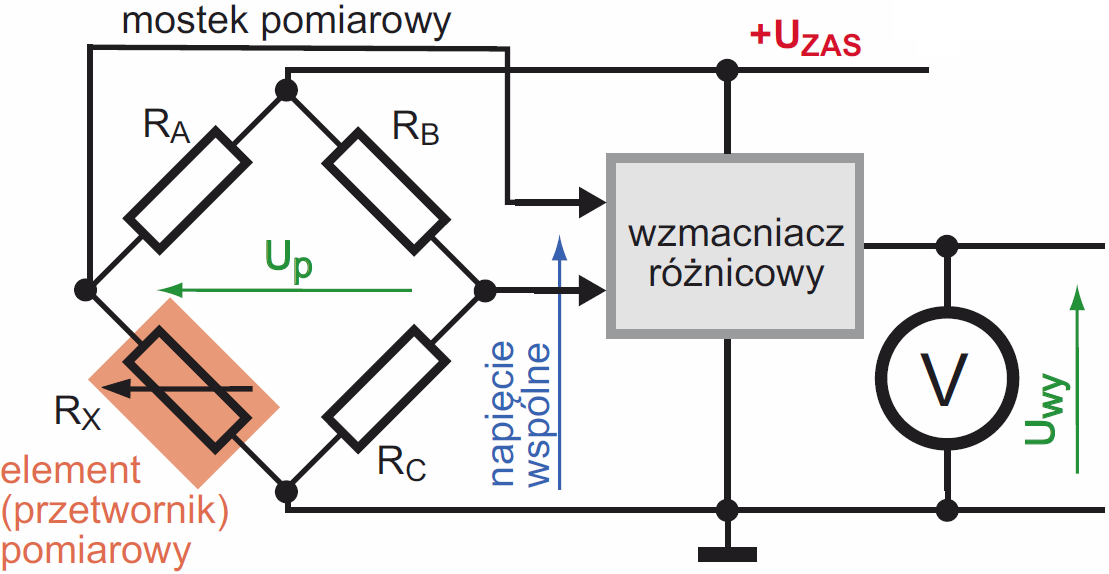
Podobnie zwykły wzmacniacz nie wystarczy do współpracy z różnymi przetwornikami i elementami pomiarowymi, gdzie wzmocnione muszą być małe napięcia stałe i zmienne, występujące na tle dużych napięć stałych. Często takie przetworniki pracują w układzie mostka i współpracują ze wzmacniaczami różnicowymi według rysunku 14.
Rysunek 14
W układzie mostkowym pracują na przykład tensometry, służące do pomiaru naprężeń. Tensometry (fotografia 15) to w istocie rezystory, których rezystancja zmienia się w zależności od naprężenia (działającej na nie siły i wielkości rozciągnięcia). W takich przypadkach niezbędny jest wzmacniacz różnicowy, który może będzie mierzył wyłącznie małą różnicę napięć między dwoma punktami, a nie będzie reagował na wartość napięcia wspólnego.
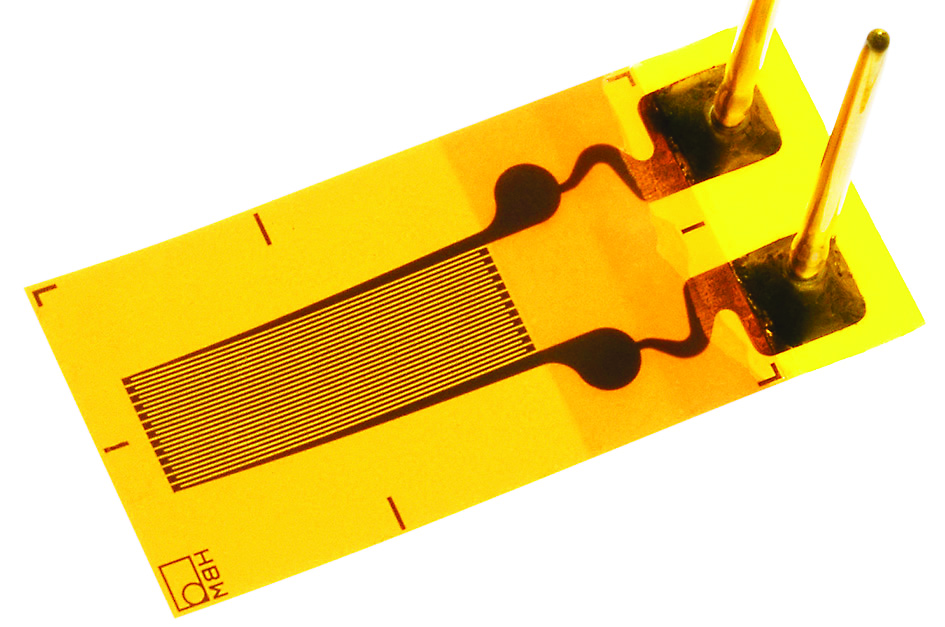
Fotografia 15
Wzmacniacz różnicowy. Sam wzmacniacz operacyjny ze swej natury jest wzmacniaczem różnicowym, czyli reaguje tylko na różnicę napięć, a nie na napięcie wspólne. Jednak wzmocnienie „gołego wzmacniacza operacyjnego” jest ogromne – zdecydowanie zbyt duże do praktycznych zastosowań. Jeżeli chcemy wzmocnić małą różnicę napięć, występującą na tle dużego i zmieniającego się napięcia wspólnego, wtedy można wykorzystać prosty wzmacniacz różnicowy według rysunku 16a z dwoma parami identycznych rezystorów (par o identycznym stosunku rezystancji). W rzeczywistości, z uwagi na rozrzuty tolerancji elementów, dla zrównoważenia układu potrzebny jest niewielki potencjometr, np. według rysunku 16b, który wyrównując stosunki rezystancji zapewni znakomite tłumienie zmian napięcia wspólnego.
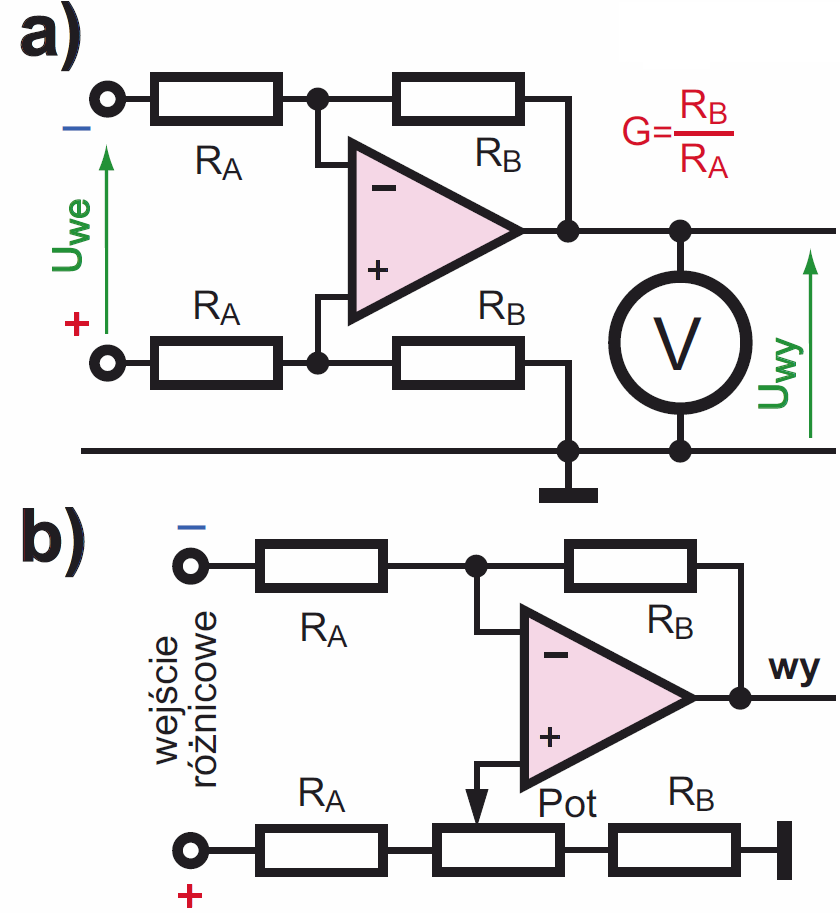
Rysunek 16
Taka prosta wersja ma jednak wady i w praktyce często stosuje się „kanoniczną” wersję wzmacniacza różnicowego (pomiarowego) według rysunku 17a. Dwie inne konfiguracje pokazane są na rysunku 17b i rysunku 17c. Ta ostatnia wersja pozwala mierzyć małe różnice napięć, występujące na tle napięć wspólnych przekraczających zakres napięcia zasilania układu, o ile rezystancje RA są odpowiednio większe od RB.
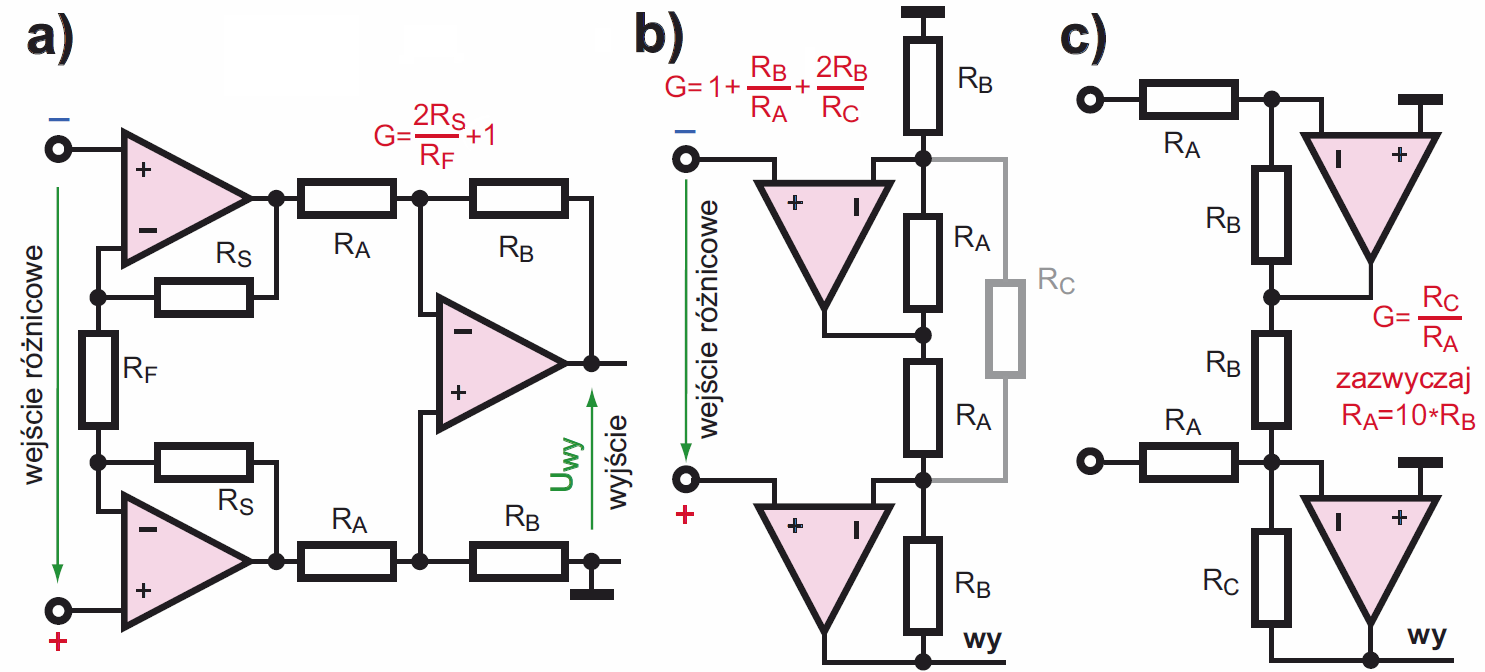
Rysunek 17
W takich wzmacniaczach pomiarowych, a także we wszelkich innych wzmacniaczach, gdzie wymagana jest dokładność i precyzja, trzeba pamiętać nie tylko o precyzji użytych rezystorów, ale też o takich źródłach błędów, jak napięcie niezrównoważenia i jego dryft cieplny, omawiane w wykładzie 12, a także o pokrewnym problemie wynikającym z niedoskonałości obwodów wejściowych wzmacniaczy operacyjnych.
Otóż w idealnym przypadku prąd wejść wzmacniaczy operacyjnych powinien być równy zeru. Jak już było to sygnalizowane w wykładzie 11 na rysunku 11b, prąd wejściowy ma pewną wartość, zwłaszcza we wzmacniaczach z tranzystorami bipolarnymi na wejściach. Prądy wejściowe wywołują znaczące spadki napięć na współpracujących rezystancjach i te spadki napięcia są wzmacniane. Ilustruje to przykład z rysunku 18a, dotyczący wzmacniacza operacyjnego o zerowym napięciu niezrównoważenia, ale z prądami wejściowymi o wartości 1 uA. Właśnie dlatego we wzmacniaczu odwracającym zaleca się dodanie rezystora korekcyjnego RK w obwodzie wejścia „dodatniego” według rysunku 18b. Jego wartość powinna być równa wypadkowej rezystancji równoległego połączenia RA i RB.
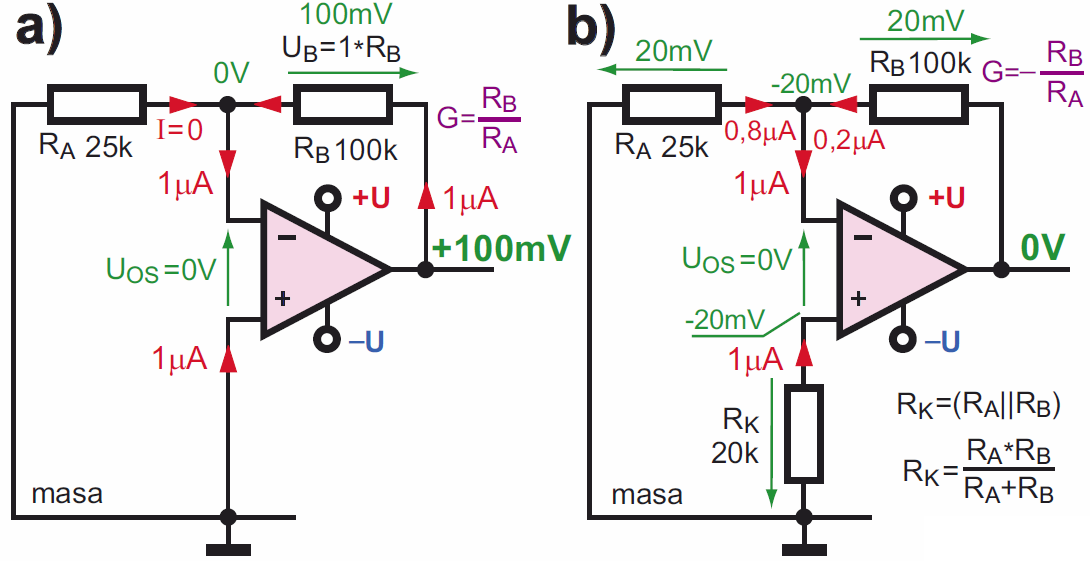
Rysunek 18
W bardziej skomplikowanych wzmacniaczach taka korekcja jest trudniejsza, ale problem można ominąć, stosując wzmacniacze o bardzo małym prądzie wejściowym, rzędu pikoamperów.
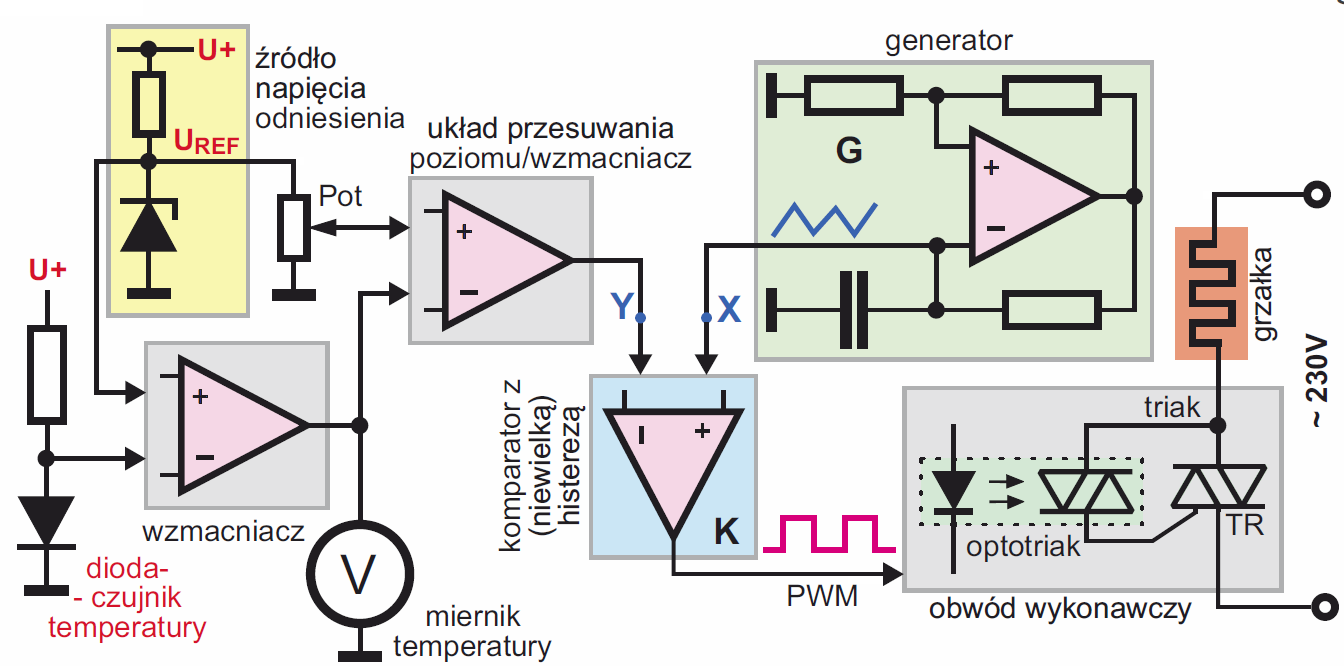
Na koniec wróćmy jeszcze do tytułowego regulatora. Gdybyśmy mieli w zestawie więcej wzmacniaczy operacyjnych, jego schemat blokowy mógłby wyglądać jak na rysunku 19.
Rysunek 19
Napięcie z diody – czujnika jest wstępnie wzmacniane i przesunięte tak, by wzrost temperatury powodował wzrost napięcia, dzięki czemu możemy też za pomocą miernika – woltomierza na bieżąco monitorować temperaturę. Napięcie wprost proprcjonalne do temperatury jest podawane na układ przesuwania poziomu, gdzie potencjometrem ustawiamy pożądaną temperaturę stabilizacji. Komparator K porównuje wzmocnione i przesunięte napięcie odpowiadające temperaturze z przebiegiem trójkątnym z generatora. Na wyjściu komparatora otrzymujemy sygnał prostokątny o wypełnieniu zależnym od temperatury. Takie regulatory z płynną regulacją wypełnienia impulsów (PWM) zapewniają zdecydowanie lepszą stabilizację temperatury niż proste regulatory dwustanowe z wykładu 8, ale tylko pod warunkiem, że czas cyklu generatora G będzie znacznie krótszy niż czas nagrzewania i stygnięcia regulowanego obiektu. I tu dochodzimy do istotnego problemu praktycznego: w takim regulatorze płynną regulację uzyskujemy przez częste włączanie i wyłączanie grzałki. Przełączanie następuje tu dużo częściej niż w najprostszym regulatorze dwustanowym, dlatego w takich regulatorach stosuje się trwalsze elementy wykonawcze, najczęściej wspomniane w wykładzie 3 tyrystory i triaki (w układzie z rysunku 19 triak TR sterowany jest za pośrednictwem optotriaka, co zapewnia galwaniczną izolację od sieci energetycznej). Natomiast styki przekaźnika mają ograniczoną trwałość i nie wytrzymałyby dłuższej pracy przy pełnym obciążeniu.
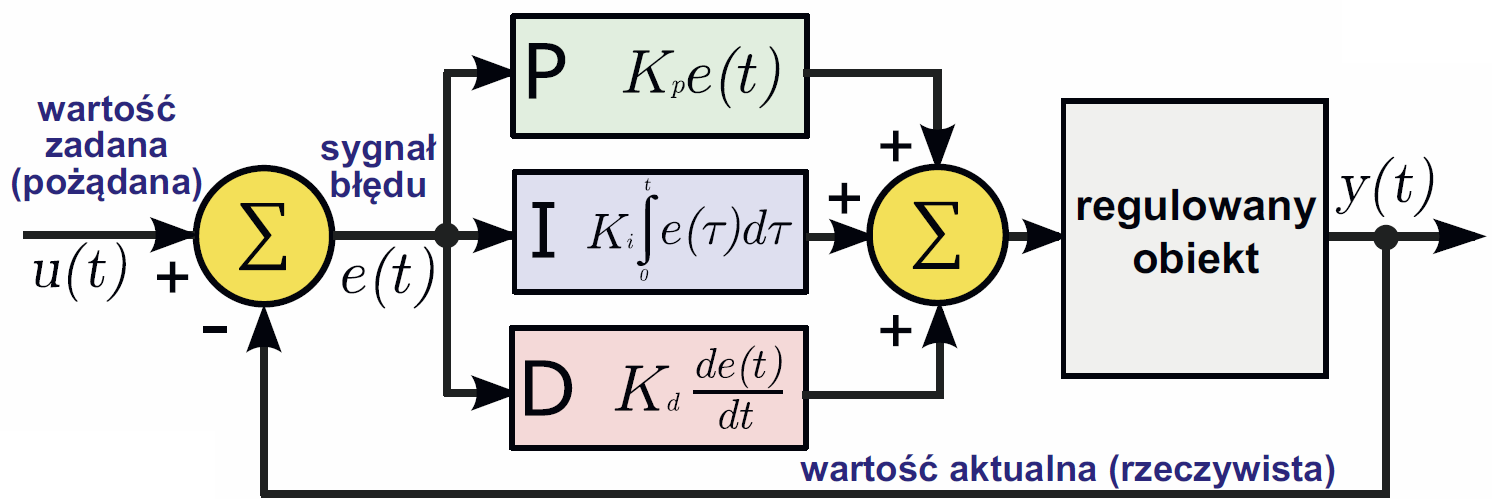
W praktyce wykorzystywane są regulatory określane PID, które w torze pomiarowym, oprócz wzmacniacza (P), zawierają też odpowiednio dobrane człony: całkujący (I) oraz różniczkujący (D). Temat regulatorów to bardzo obszerna, odrębna dziedzina – ogólna idea systemu z regulatorem PID pokazana jest na rysunku 20.
Rysunek 20
Obecność dodatkowego uśredniającego członu całkującego (I) i przyspieszającego członu różniczkującego (D) pozwala poprawić parametry dynamiczne, czyli zmniejszyć błędy regulacji przy zmianach temperatur i szkodliwym wpływie na system innych czynników. O obwodach całkujących i różniczkujących dowiesz się nieco więcej w następnym wykładzie.
Piotr Górecki


