Silniki krokowe – wstęp do budowy zabawek
Silnik krokowy to bardzo ciekawa odmiana silnika elektrycznego. Ma on tę właściwość, że potrafi w sposób stabilny obrócić swój wirnik o kąt mierzony pojedynczymi stopniami (lub mniej). Ta cecha zaowocowała zastosowaniem go do budowy różnych mikromaszyn.
Silniki krokowe to elementy mające szerokie zastosowanie w automatyce, robotyce, itp. Podanie na uzwojenie silnika impulsu prądu elektrycznego powoduje, że jego wirnik nie obraca się ruchem ciągłym, lecz wykonuje ruch obrotowy o ściśle ustalony kąt. Dzięki temu kąt obrotu wirnika jest ściśle zależny od liczby dostarczonych impulsów (no i rzecz jasna od jego cech konstrukcyjnych), a prędkość kątowa wirnika jest proporcjonalna do częstotliwości tych impulsów. Kąt obrotu wirnika pod wpływem działania jednego impulsu może mieć różną wartość, zależnie od budowy silnika – jest to zwykle wartość od kilku do kilkudziesięciu stopni.
Zwykłe silniki prądu stałego mają dwa wyprowadzenia, które po przyłączeniu do źródła napięcia powodują, że silnik wykonuje ruch obrotowy. Silniki krokowe natomiast mają kilka wyprowadzeń. Z punktu widzenia budowy (w sensie rozwiązań elektrycznych), można je podzielić na unipolarne i bipolarne.
Wariant bipolarny, mający dwa uzwojenia (stąd taki silnik ma wyprowadzone cztery przewody), wymaga cyklicznej zmiany polaryzacji napięcia przyłączonego do uzwojenia, co zmusza do zastosowania rozwiązania typu mostek H (dokładniej dwóch mostków typu H). W drugim wariancie (unipolarnym), występują cztery uzwojenia, które zasilane w odpowiedniej kolejności powodują ruch obrotowy wirnika. Sterowanie tego typu sinikiem jest łatwiejsze, wystarczą proste układy komutujące prąd płynący w uzwojeniach (przepływ prądu jest w jednym kierunku).
Budowa i działanie silnika unipolarnego
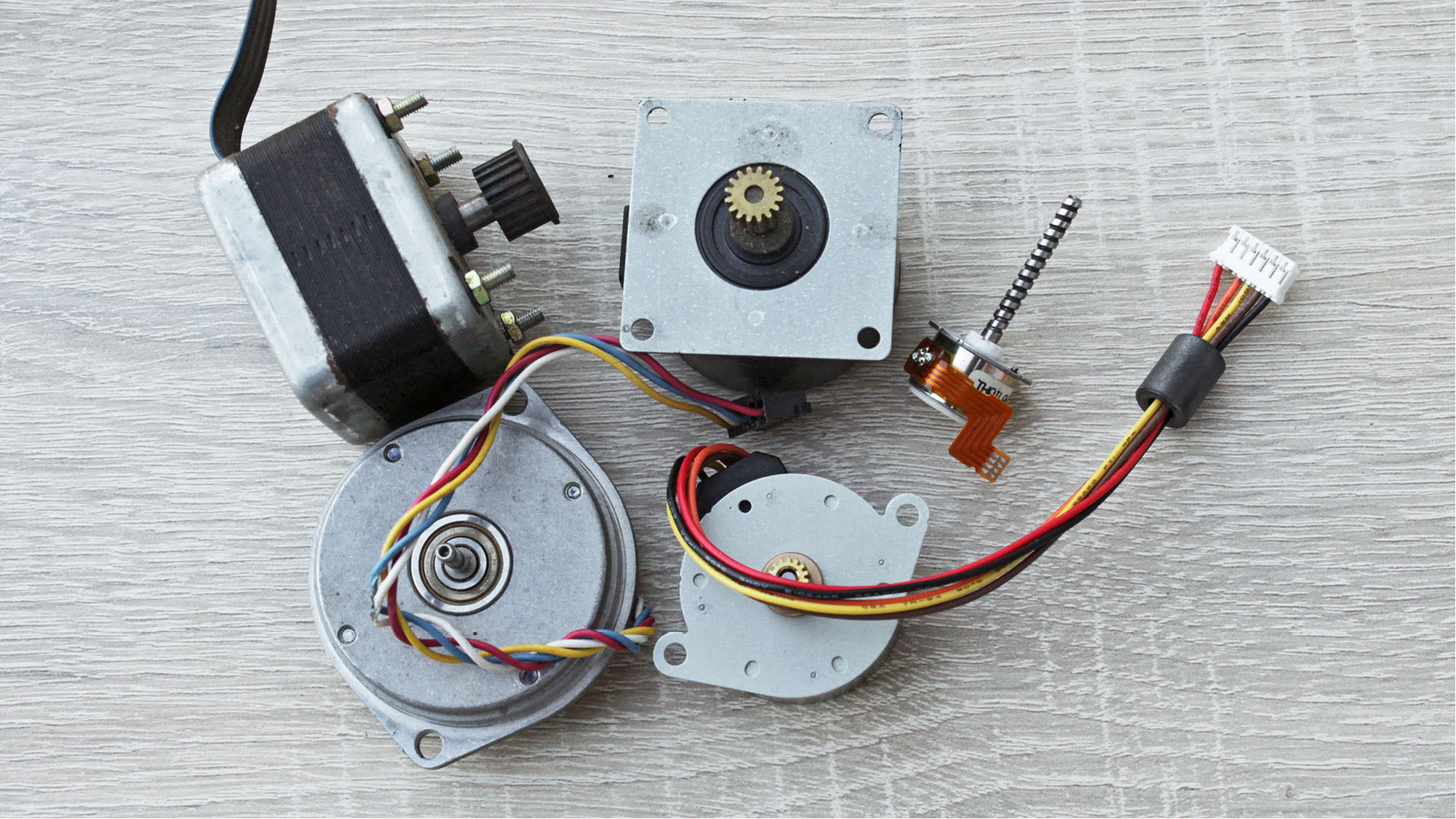
Typowym rozwiązaniem jest grupa czterech uzwojeń z jednym wspólnym końcem wyprowadzonym na zewnątrz (to implikuje 5 przewodów wychodzących z silnika). Każde uzwojenie jest podzielone na dwie sekcje połączone szeregowo. Pewien pogląd na budowę daje fotografia 1 (autor: Nicolas Kruse, licencja Creative Commons). Uzwojenia są rozłożone na stojanie, natomiast wirnik jest bardzo silnym magnesem. Niektóre silniki są „rozbieralne” (jak choćby ten z fotografii 1), chcę jednak przestrzec potencjalnych ciekawskich, że nie jest to dobry pomysł, gdyż bez specjalistycznego wyposażenia ponowne złożenie jest niemożliwe. Zastosowane magnesy są tak silne, że nie da się uzyskać jednakowej szczeliny na całym obwodzie między stojanem a wirnikiem. Tę szczególną wiedzę uzyskałem w wyniku własnych doświadczeń a części silnika zostały poddane recyklingowi (samowiedza utrwala się najsilniej).
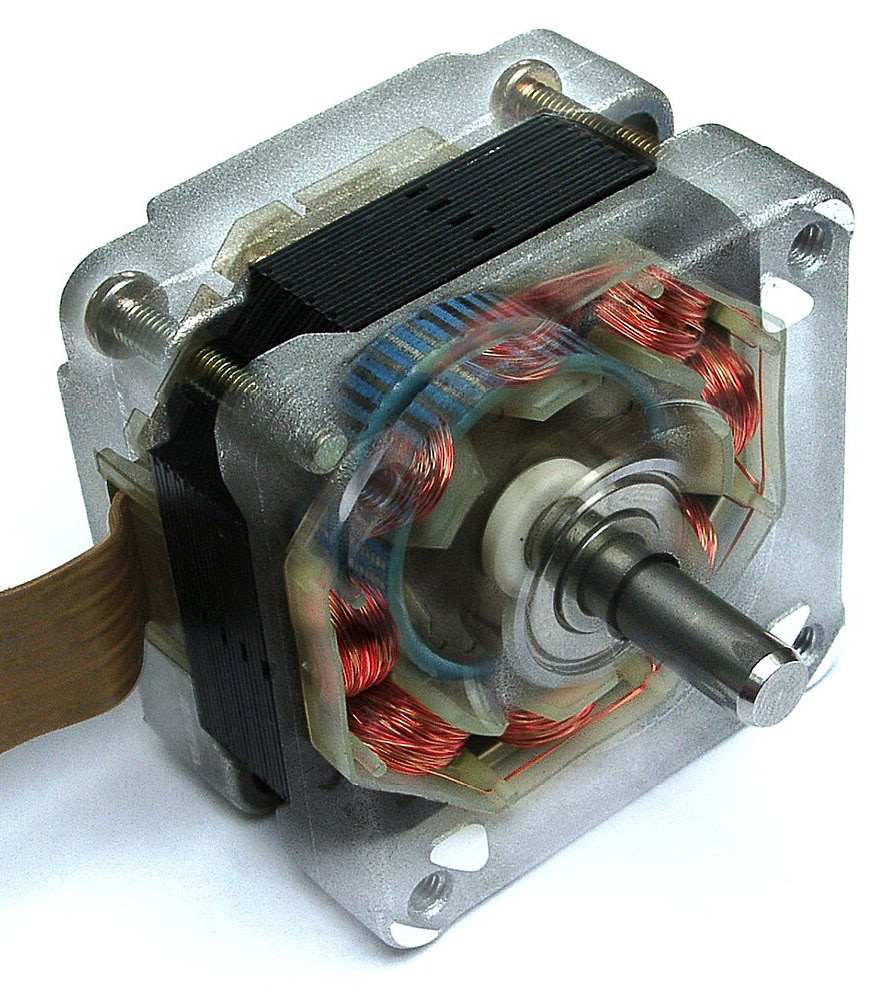
Fotografia 1
Uzwojenia w silniku są połączone w sposób przedstawiony w dużym uproszczeniu na rysunku 2.

Rysunek 2
Jedne końce uzwojeń są połączone razem i jako jeden przewód wyprowadzone na zewnątrz silnika, a pozostałe, drugie końce wszystkich uzwojeń są wyprowadzone niezależnie na zewnątrz (co daje finalnie 5 przewodów). Przyłączenie wspólnego przewodu do plusa zasilania oraz tylko jednego (z indywidualnych przewodów od każdego uzwojenia) do minusa, spowoduje, że płynący prąd wytworzy pole magnetyczne, który oddziałując na wirnik sprawi, że ustawi się on w określonym kierunku, jak pokazuje rysunek 3a, i tak pozostaje. Przełączenie minusa na inne uzwojenie doprowadzi do obrotu wirnika o niewielki kąt, doprowadzając do sytuacji pokazanej na rysunku 3b. Kolejna komutacja prądu w uzwojeniach (rysunek 3c) wymusza kolejny niewielki obrót wirnika. Następne przełączenie (rysunek 3d) wymusza obrót wirnika o kolejny krok. Po czterech impulsach prądu (w odpowiedniej kolejności dla każdego uzwojenia) wirnik został obrócony o 45º (na rysunku, w rzeczywistych rozwiązaniach może być inaczej). Powrót do wariantu z rysunku 3a rozpoczyna nowy cykl obrotowy. Wynikający z tego wniosek jest taki, że silnik krokowy unipolarny wymaga przyłączenia wspólnego przewodu do plusa zasilania oraz łączenia kolejno do minusa zasilania poszczególnych przewodów w odpowiedniej kolejności.
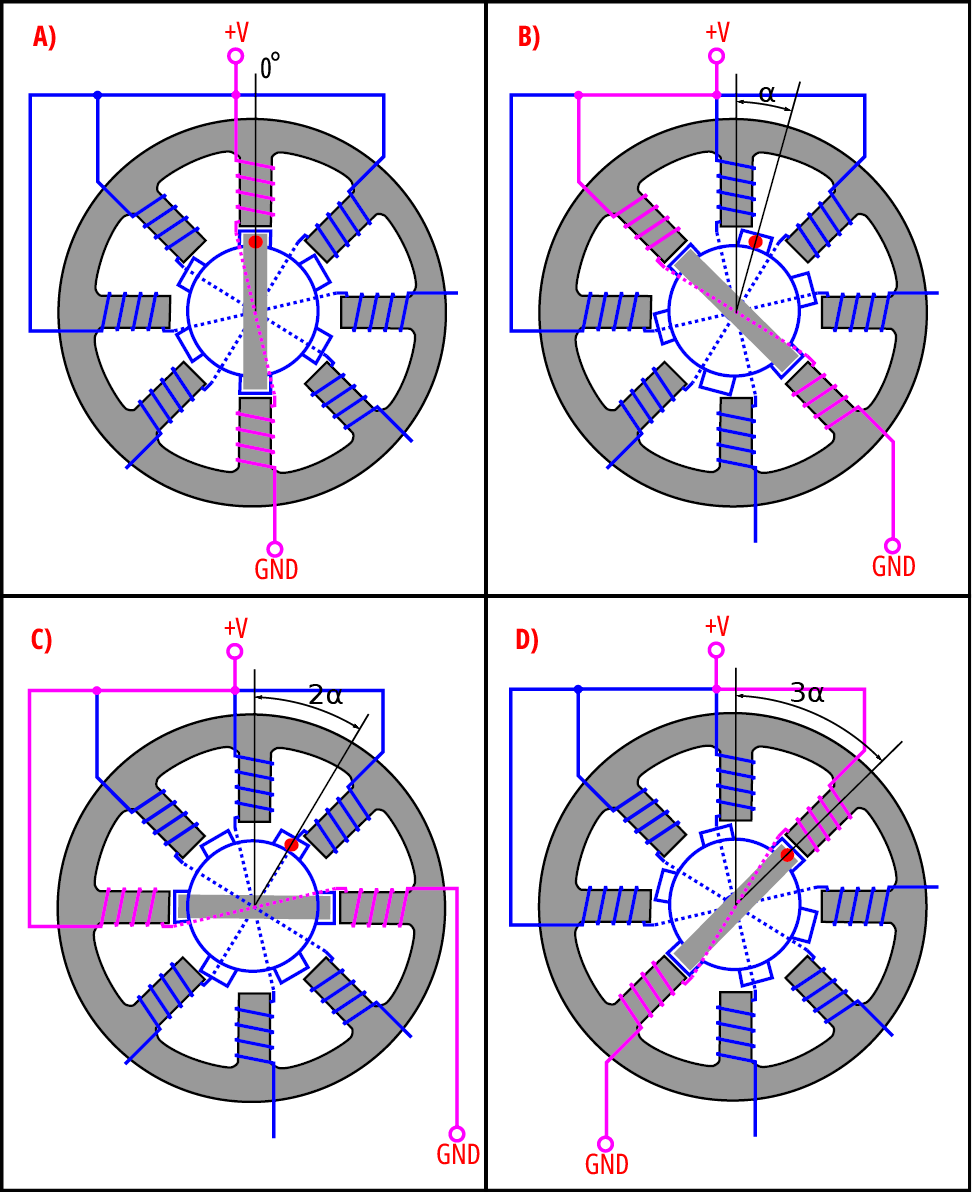
Rysunek 3
Przedstawione rozważania są dużym (ale wystarczającym) przybliżeniem, gdyż rzeczywistość jest trochę bardziej złożona. Sam wirnik jest magnesem stałym o biegunach rozłożonych naprzemiennie wzdłuż obwodu, jak pokazuje rysunek 4 (można to dostrzec na przekrojowej fotografii 1). Odpowiednio dobrane są też początki i końce uzwojeń, co wpływa na kierunki pola magnetycznego w każdym uzwojeniu.
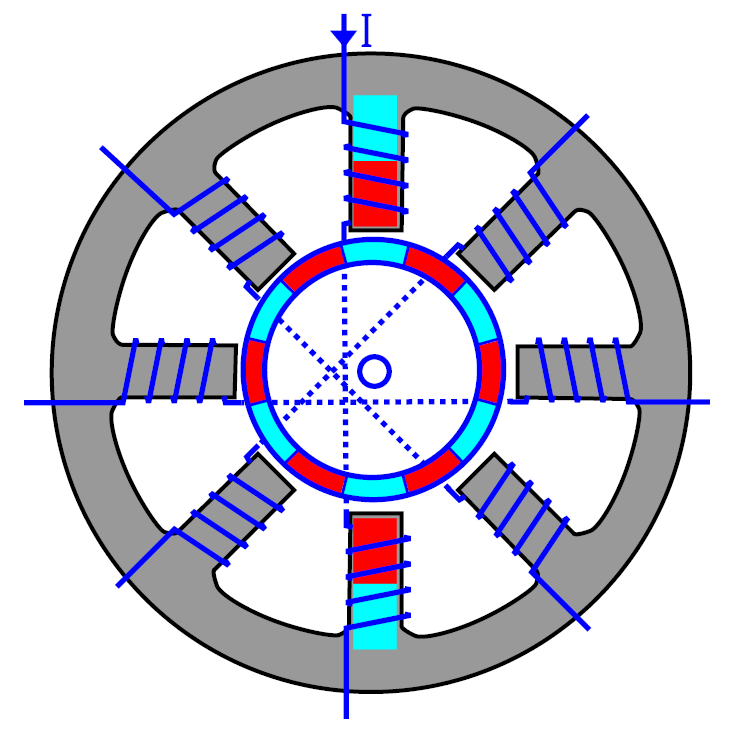
Rysunek 4
(…)
——– ciach! ——–
To jest tylko fragment artykułu, którego pełna wersja ukazała się w styczniowym numerze czasopisma Zrozumieć Elektronikę (ZE 1/2026). Pełną wersję czasopisma znajdziesz pod tym linkiem. Natomiast niepełna, okrojona wersja, pozwalająca zapoznać się z zawartością numeru ZE 1/2026 znajduje się tutaj.
Andrzej Pawluczuk
apawluczuk@vp.pl
Uwaga! Wskazówki, jak nabyć pełne wersje dowolnych numerów ZE znajdują się na stronie:
https://piotr-gorecki.pl/n11.