

PKE – Praktyczny Kurs Elektroniki (20) Cyfrowy dręczyciel, suchomonitor, akumonitor
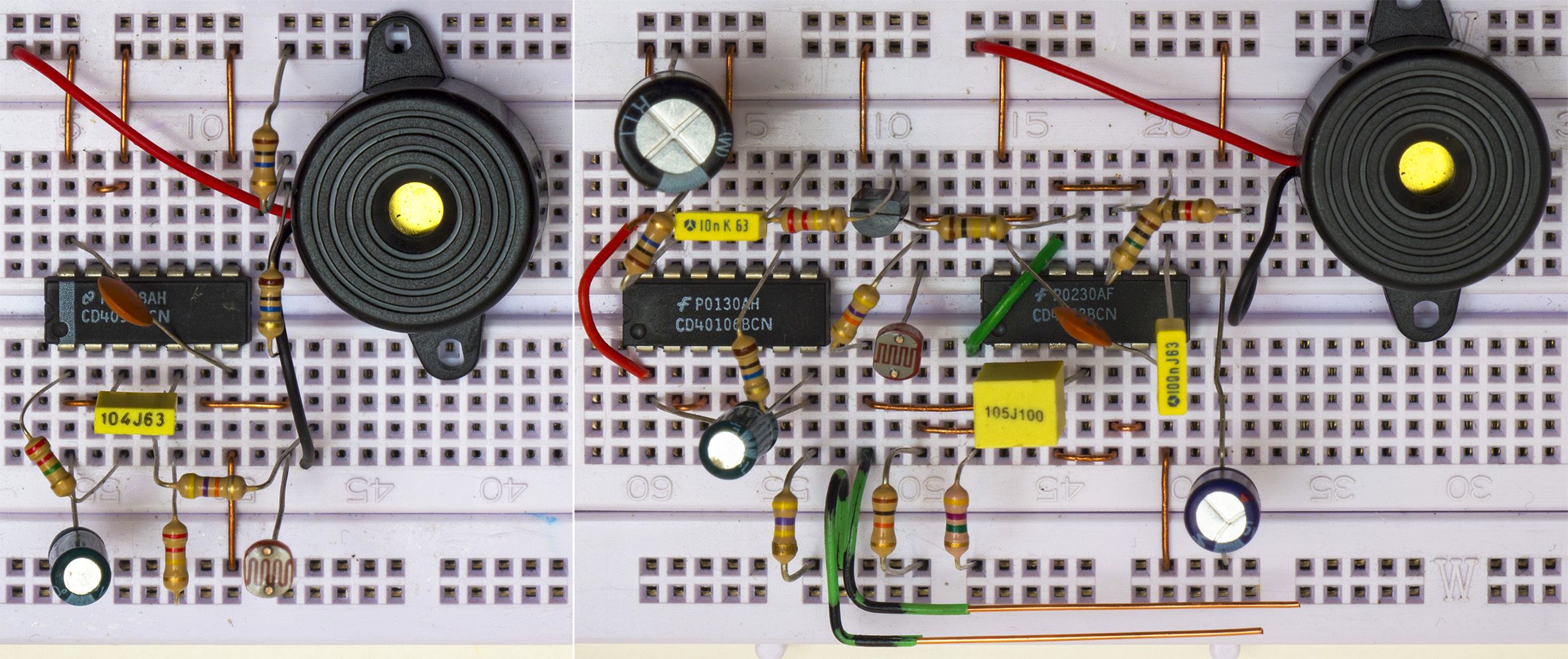
Fotografia tytułowa pokazuje dwa modele, a trzeci pokazany jest na fotografii A. Dwa ostatnie działają na podobnej zasadzie: zawierają ultraoszczędny generator pracujący z bardzo małą częstotliwością.
Co pewien czas generator na chwilę „budzi do życia” pozostałą część układu, która szybko wykonuje swoje zadania, a następnie układ znów wraca do stanu uśpienia. Dzięki takiej przerywanej pracy średni pobór prądu jest znikomy i baterie wystarczą na bardzo długo. Układy te mają podobne schematy, pokazane na rysunkach B, C, D. Na rysunku C ten ultraoszczędny generator wyróżniony jest kolorową podkładką.
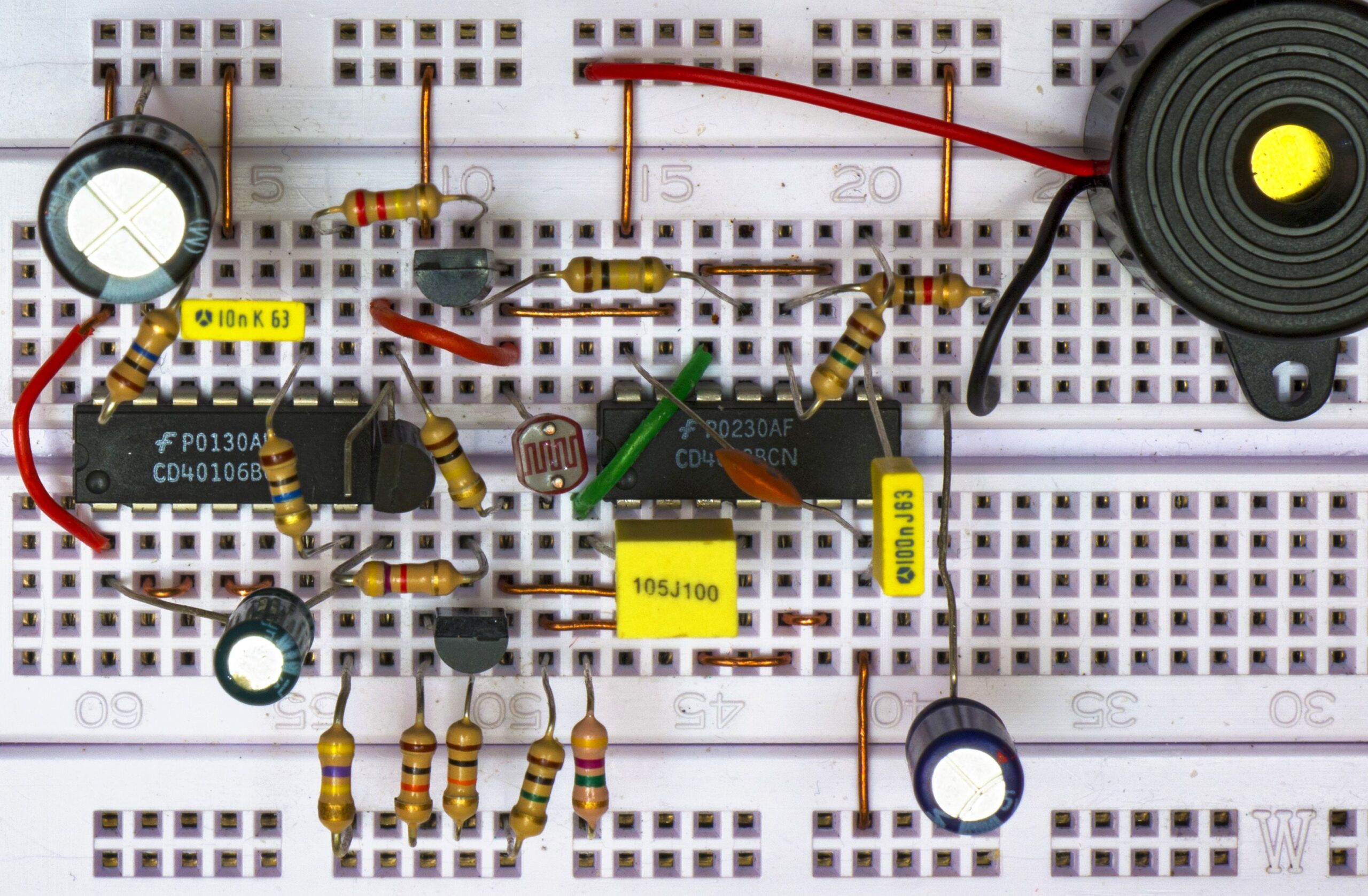
Fotografia A
Cyfrowy dręczyciel to wersja Nocnego dręczyciela z wykładu 4. Aby zrobić komuś dowcip, należy podrzucić urządzonko do jego sypialni w miejsce niewidoczne i trudno dostępne, na przykład na szafę (regał). Układ rozpoczyna działanie gdy ofiara dowcipu zgasi światło. Wtedy co kilkadziesiąt sekund wytwarza krótki, niezbyt głośny, ale irytujący pisk. Gdy zaniepokojona tym ofiara zaświeci światło, żeby poszukać dokuczliwego „owada”, fotorezystor wyłączy dźwięk. Układ będzie milczał do czasu, gdy nieszczęśnik znów zgasi światło…
UWAGA! Na takie żarty można sobie pozwolić wyłącznie względem zaprzyjaźnionych osób, mających duże poczucie humoru. W przeciwnym wypadku układ może zostać zniszczony, a autor dowcipu naraża się na poważną awanturę, a być może sam stanie się ofiarą rękoczynów.
Drugi układ, Suchomonitor co około trzy godziny sprawdza, czy między elektrodami jest sucho czy wilgotno – gdy stwierdzi nieprawidłowy stan, włączy brzęczyk ostrzegawczy. W wersji podstawowej może służyć jako monitor suchego kwiatka – elektrody A, B w postaci metalowych drutów należy wbić w ziemię w doniczce. Gdy ziemia wyschnie, co trzy godziny brzęczyk odezwie się na około sekundę, przypominając o podlaniu.
Akumonitor to monitor akumulatora 12 V, który podobnie okresowo sprawdza napięcie na nieużywanym akumulatorze. Gdy napięcie zanadto się obniży – włącza alarm dźwiękowy, by nie dopuścić do całkowitego rozładowania i uszkodzenia akumulatora.
Opis układu dla „zaawansowanych”
W układzie cyfrowego dręczyciela z rysunku B bramka U1A to generator taktujący. Odstęp pomiędzy kolejnymi sygnałami można zmieniać za pomocą R1 (1 MΩ…10 MΩ). Stała czasowa R2C2 wyznacza czas trwania sygnału, a R2 może mieć wartość 100 kΩ…470 kΩ. Rezystancja R3 wyznacza poziom oświetlenia, przy którym sygnał zostanie wyłączony. Czy większa wartość R3, tym w większym mroku sygnał zostanie włączony. Rezystor R4 ogranicza głośność brzęczyka Y1. Sygnały nie powinny być ani za długie, ani za głośne, żeby nie można było odnaleźć urządzenia w ciemności.
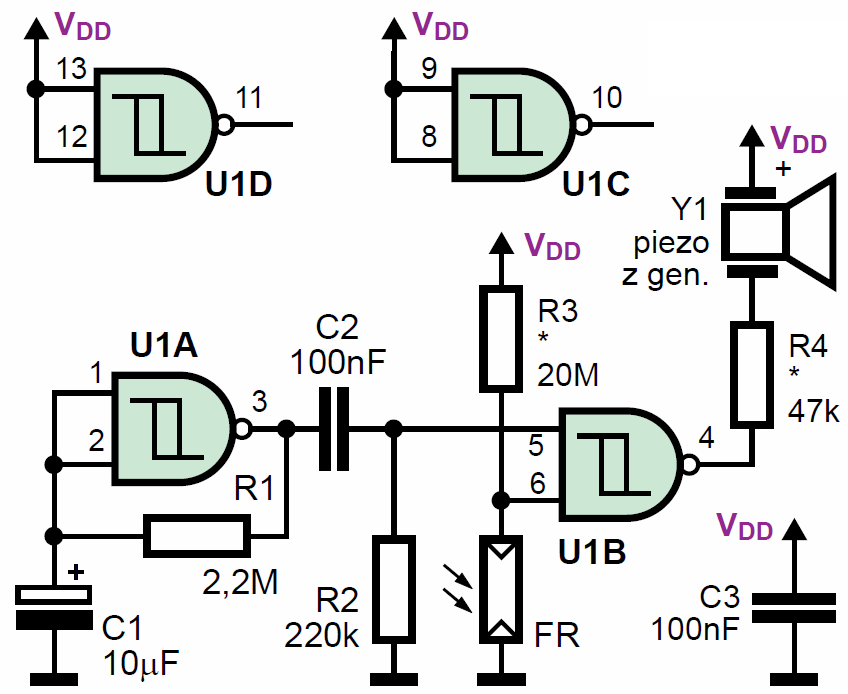
Rysunek B
W układzie Suchomonitora, czyli monitorze suchego kwiatka z rysunku C mamy energooszczędny generator taktujący U1F o okresie około 10000 sekund czyli prawie 3 godziny (1000 uF×10 MΩ) oraz układ różniczkujący R2C2. Nóżka 7 kostki U1 nie jest dołączona do masy, tylko do punktu połączenia R3, C3, R2. Dzięki rezystorowi R3 średni pobór prądu w stanie czuwania wynosi tylko około 15 mikroamperów, więc 9-woltowa bateria alkaliczna starczyłaby na ponad 3 lata pracy takiego monitora. W punkcie A występują ujemne impulsy o czasie trwania około 0,1 ms, powtarzane co około 3 godziny. Taki ujemny impuls otwiera tranzystor T1 i umożliwia pracę czujnika wilgoci (W1, R5) i czujnika światła (FR, R6). Czujnik W1 to dwie elektrody (igły) wbite w ziemię doniczki. Gdy ziemia wyschnie, rezystancja między elektrodami wzrośnie. R5 trzeba dobrać według potrzeb. Gdy ziemia w doniczce jest sucha i gdy jest jasno, na obu wejściach bramki U2A pojawi się stan wysoki. Stan wysoki pojawia się też w punkcie C i D, co uruchomi generator U2C i brzęczyk Y1. Stan niski w punkcie D gwarantuje przewodzenie T1 przez czas, wyznaczony przez R7C4, czyli dłużej, niż impuls w punkcie A. Fotorezystor FR wyłącza sygnalizator w nocy, gdy domownicy śpią. Rezystor R6 powinien mieć dobraną, na tyle niedużą wartość, żeby nie budził domowników nad ranem, tylko dopiero po odsłonięciu zasłon w pokoju.
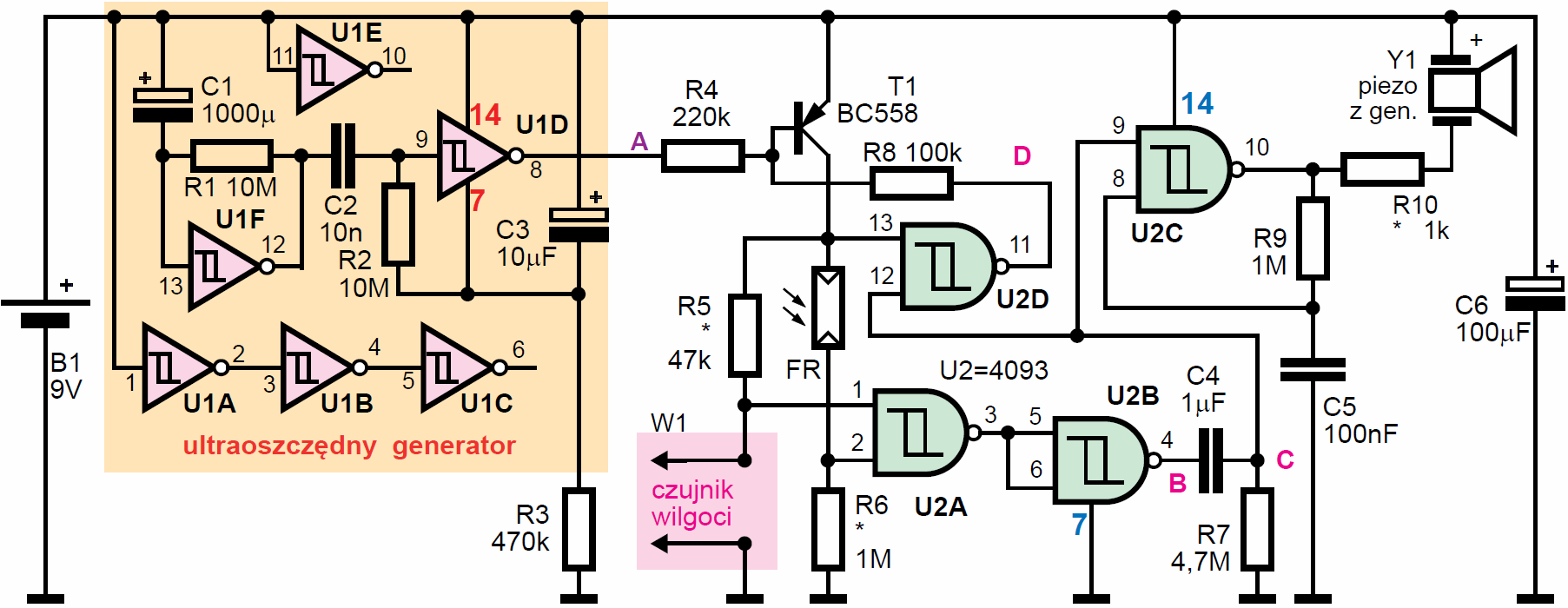
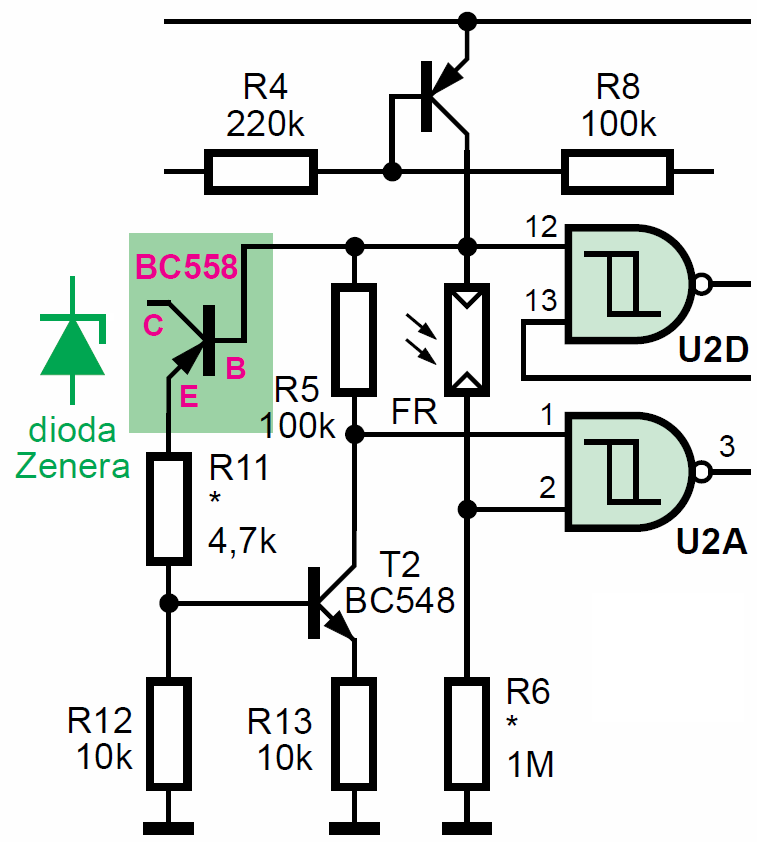
Rysunek C
Podczas budowy i testów warto wstępnie zastosować C1 = 100 nF, co ułatwi korektę podanych na schemacie wartości R5 i R6 (nie należy włączać T1 na stałe, bo uniemożliwi to pracę obwodu z R7C4).
Uwaga! Aby uzyskać dużą stałą czasową, w tym i następnym układzie kondensator elektrolityczny C1 o pojemności 1000 uF współpracuje z rezystorem R1 = 10 MΩ. Aby zmniejszyć prąd upływu tego dużego kondensatora elektrolitycznego i umożliwić tym pracę generatora, przed uruchomieniem układu należy C1 dołączyć na kilka godzin do napięcia 7…12V.
Akumonitor przeznaczony do kwasowych (także żelowych) akumulatorów 12 V działa bardzo podobnie. Zmieniony jest tylko obwód czujników w kolektorze tranzystora T1, współpracujący z bramką U2A według rysunku D. Obwód z tranzystorem T2 i trzecim tranzystorem BC558 pracującym w roli diody Zenera sprawdza, czy napięcie akumulatora zanadto nie spadło. W moim modelu z R11 = 4,7 kΩ próg zadziałania wyniósł 10,9 V. W praktyce należy zastosować prawdziwą diodę Zenera (5,1 V…7,5 V) i tak dobrać wartość R11, żeby próg zadziałania sygnalizatora nie był niższy niż 10,8 V, lepiej 11…11,5 V. Na czas testów warto zastosować C1 = 100 nF.
Rysunek D
Poznajemy elementy i układy elektroniczne
W wykładzie 20 zajmiemy się głównie poborem prądu. Niedoświadczeni hobbyści cieszą się podręcznikową informacją, że układy CMOS nie pobierają prądu. Przekonamy się, iż w rzeczywistości aż tak dobrze nie jest. Pobór prądu wynika z kilku zjawisk, które powinieneś dobrze zrozumieć.
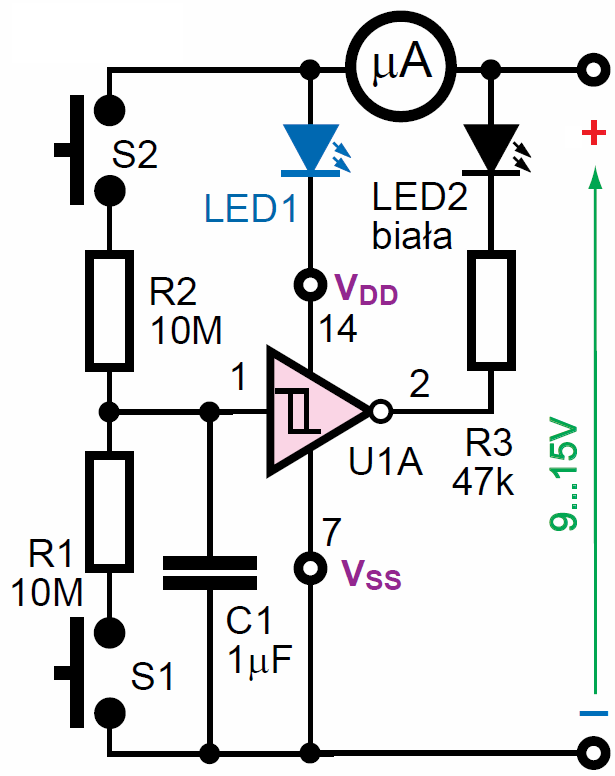
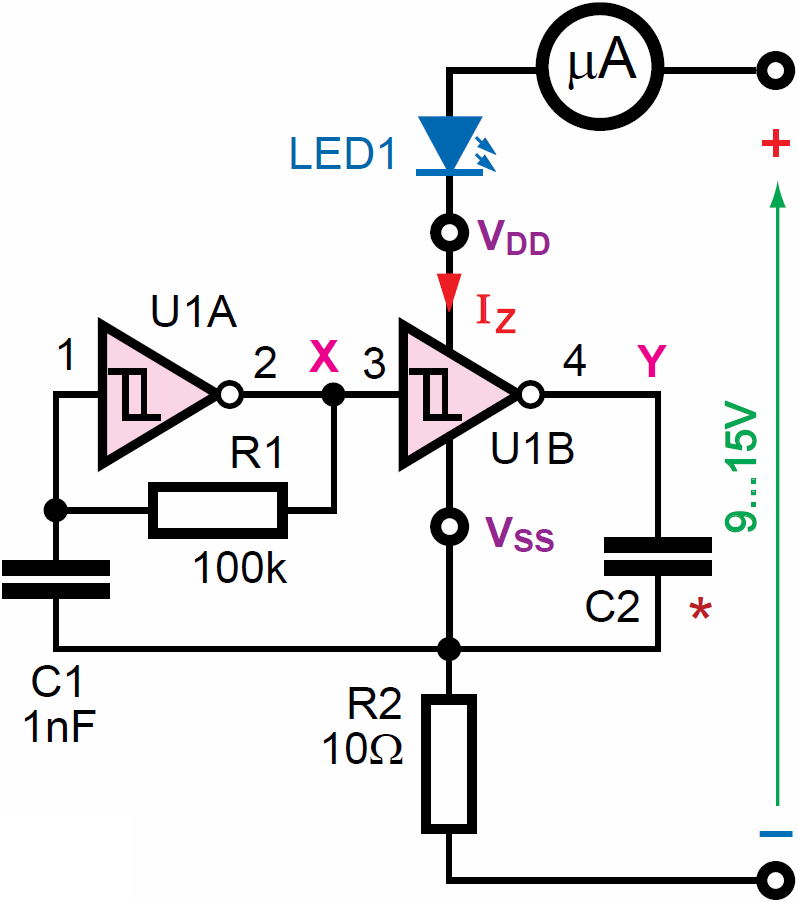
W tym celu na początek zbuduj układ z „pomiarową diodą LED” w układzie z rysunku 1.
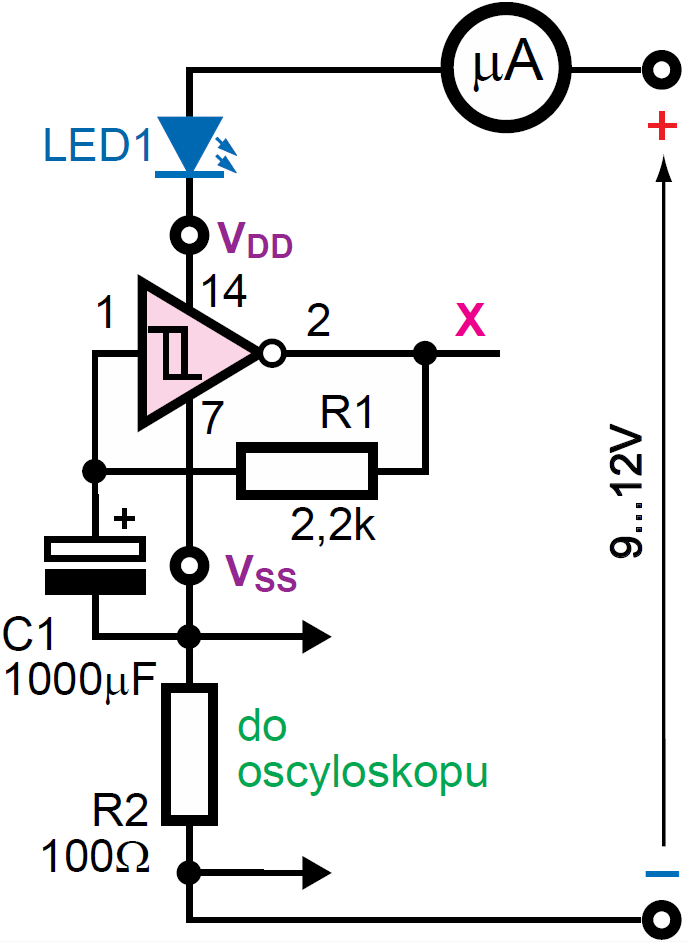
Rysunek 1
Mikroamperomierz (multimetr) nie jest niezbędny. Napięcie zasilania powinno być możliwe duże, co najmniej 9 V, lepiej 12…18 V. Na bramce U1A zrealizowaliśmy generator. Nie zapomnij o dołączeniu wszystkich niewykorzystanych wejść albo do nóżki 14, albo 7 – nie mogą one „wisieć w powietrzu”. Niebieska dioda LED włączona w obwodzie zasilania pokaże wizualnie, jaki jest pobór prądu. Dzięki włączonemu „od dołu” rezystorowi R2 możemy też zmierzyć pobór prądu oscyloskopem. Przy podanych wartościach elementów (R1 = 2,2 kΩ, C1 = 1000 uF, stała czasowa 2,2 s) niebieska dioda LED powoli pulsuje – pobór prądu znacznie się zmienia. Dioda świeci dość jasno, co wskazuje, że pobór prądu jest znaczny. Fotografia 2a pokazuje mój model, gdzie przy R1 = 2,2 kΩ, C1 = 10 uF i zasilaniu 12 V multimetr pokazuje średni pobór prądu 1108 uA (1,108 mA). Pobór prądu można znacząco zmniejszyć, zwiększając rezystancję R1. Fotografia 2b pokazuje pobór prądu (228 uA) z elementami R1 = 20 MΩ, C1 = 1 nF.
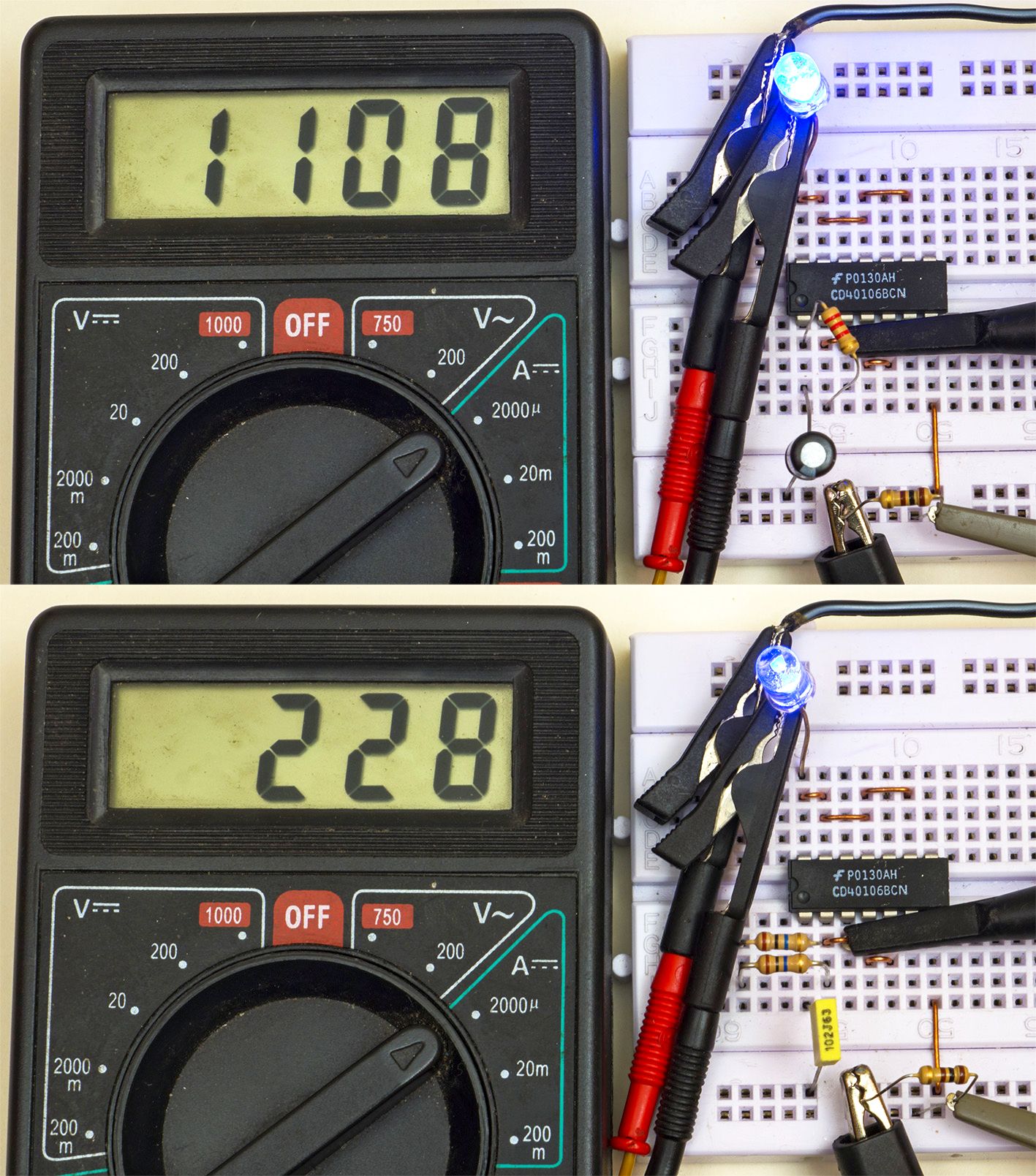
Fotografia 2
Rysunek 3, zrzut z ekranu oscyloskopu pokazuje przebiegi napięcia w punkcie X (kolor czerwony) oraz przebieg prądu (spadek napięcia na rezystorze R2 = 100 Ω – kolor niebieski) przy takich wartościach elementów. Jest oczywiste, że układ pobiera prąd ze źródła zasilania podczas ładowania kondensatora C1 przez rezystor R1, gdy w punkcie X jest stan wysoki. Przy napięciu zasilania 9 V przez rezystor R1=2,2 kΩ może popłynąć maksymalnie 4,1 mA (9 V/2,2 kΩ). Jednak przy R1=20 MΩ popłynie nie więcej niż 0,45 uA (9 V/20 MΩ). A prąd według rysunku 3b sięga w szczytach 400 uA! Dlaczego?
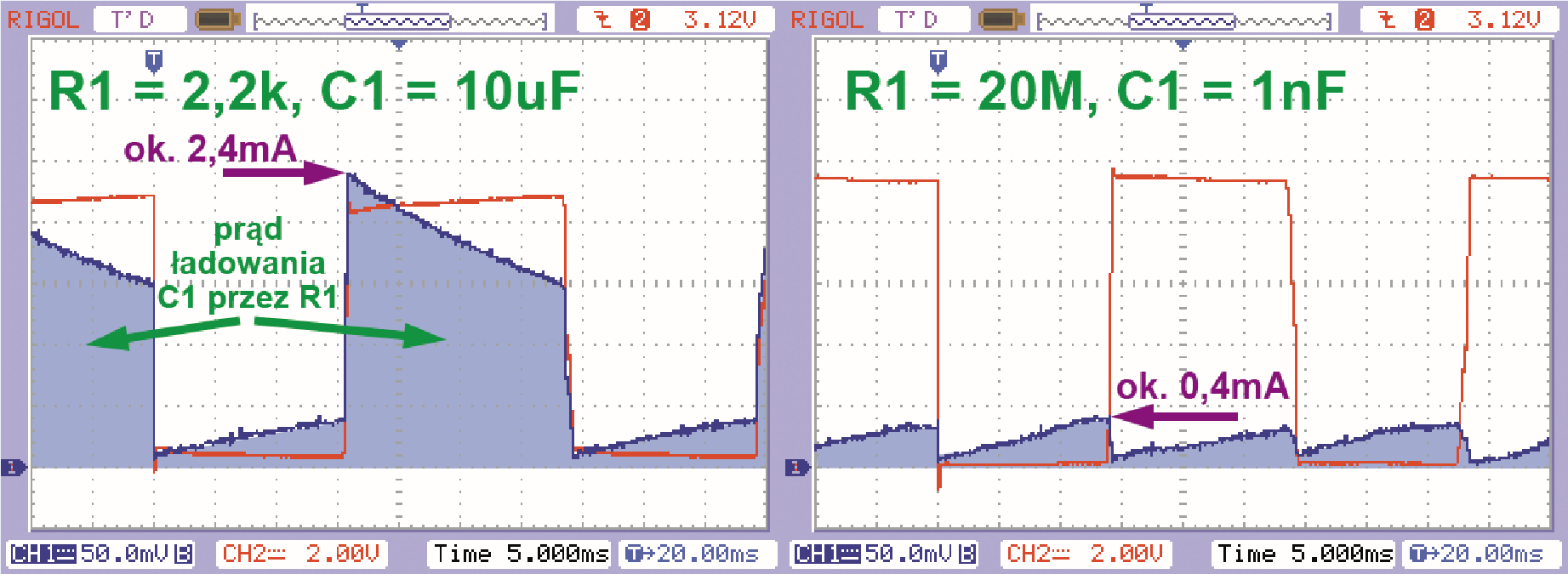
Rysunek 3
Zbadajmy układ według rysunku 4. Monitor w postaci LED2 pokaże stan wyjścia, nie zwiększając prądu płynącego przez końcówkę 14. Znów wejścia wszystkich niewykorzystanych inwerterów trzeba połączyć albo do nóżki 14, albo do nóżki 7.
Rysunek 4
Dwa przyciski i rezystory o dużej wartości pozwalają powoli ładować i rozładowywać kondensator C1. Naciśnij o przytrzymaj S1 przez kilka sekund – rozładujesz kondensator do zera. Obie diody zgasną. Następnie przyciśnij S2 by naładować C1 przez R2: po chwili niebieska dioda LED1 płynnie się rozjaśni, nagle zaświeci biała dioda LED2, a potem LED1 płynnie zgaśnie. Następnie naciśnij na kilka sekund oba przyciski – na kondensatorze ustali się napięcie około połowy napięcia zasilania i dioda LED1 będzie zapewne świecić. Naciskając krótko na przemian S1, S2 spróbuj uzyskać najjaśniejsze świecenie LED1 (zamiast przycisków S1, S2 możesz też wykorzystać czujniki dotykowe – rezystancję palca). Fotografia 5 pokazuje, że mój egzemplarz kostki 40106 w układzie z rysunku 4 pobierał około 750 uA prądu. Przy zabawie z krótkim naciskaniem przycisków S1, S2 zauważysz, że zmiana stanu wyjścia powoduje też mignięcie LED1, co wynika z faktu, że nasz inwerter z kostki 40106 ma na wejściu obwody zapewniające histerezę. Gdybyś zastosował „zwykłe” inwertery z kostki 4069 lub „zwykle bramki”, zmiany jasności diody LED1 byłyby płynne, bez takiego mignięcia.
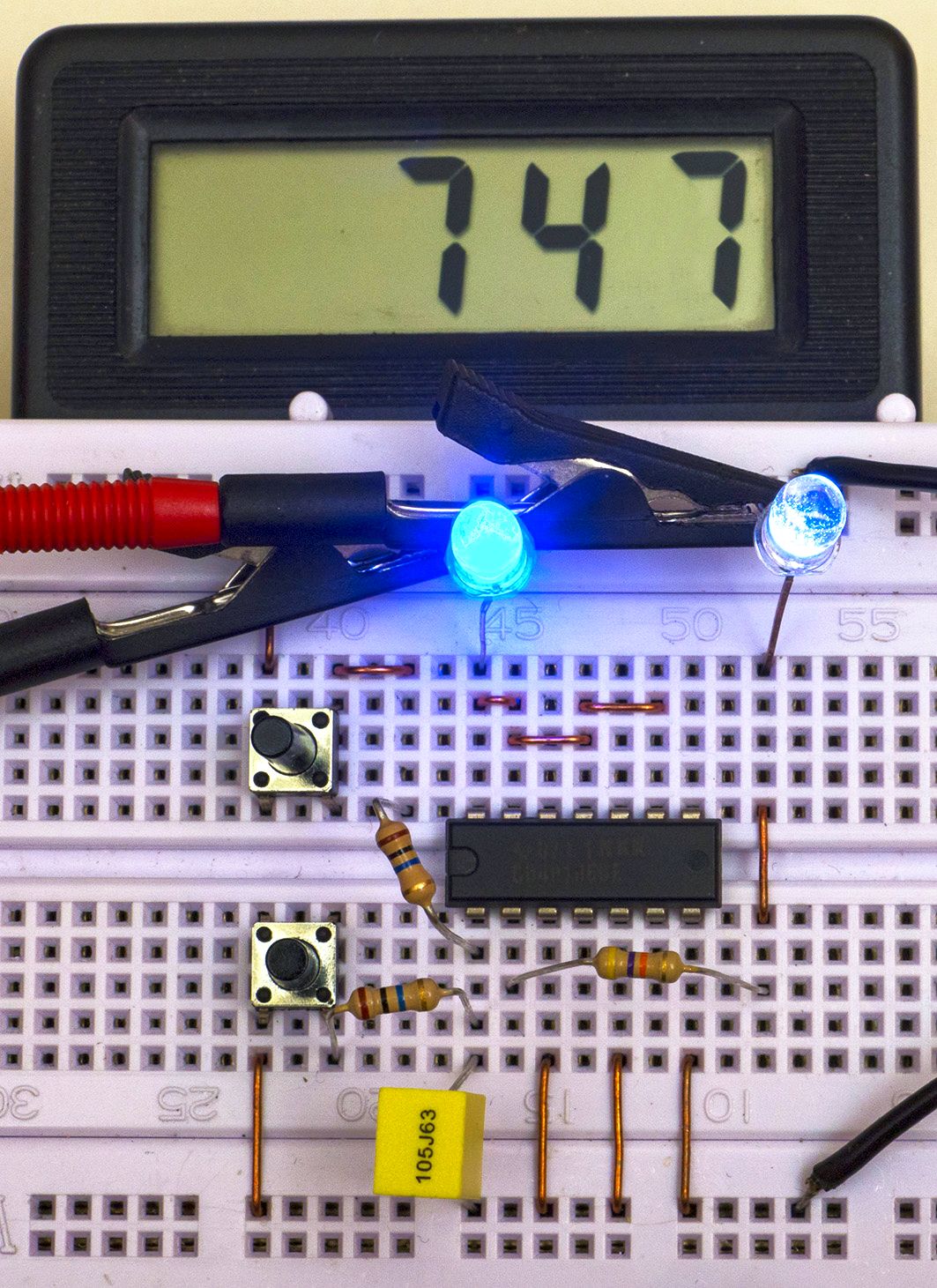
Fotografia 5
Przy okazji warto nadmienić, że kondensator C1, a nawet maleńka pojemność wejściowa jest elementem pamiętającym. Można usunąć kondensator C1 i naciskając przyciski S1, S2 „zapamiętywać” na pojemności wejściowej stan niski i wysoki (to zjawisko wykorzystuje się w tzw. pamięciach nieulotnych EEPROM i FLASH, do czego wrócimy w wykładzie 24).
Mamy też odpowiedź na pytanie, dlaczego nie należy pozostawiać wejść układów CMOS „wiszących w powietrzu”. Otóż może wystąpić niekontrolowane ładowanie czy rozładowanie pojemności wejściowej przez maleńkie prądy stałe, płynące albo przez niedoskonałe struktury wewnętrzne, albo co bardziej prawdopodobne, płynące na zewnątrz układu przez zanieczyszczenia, wilgoć i kurz. Zmianę napięć mogą też powodować przychodzące z zewnątrz zakłócenia zmienne. W każdym razie niekontrolowane zmiany napięć wejściowych w najlepszym przypadku zwiększą pobór prądu, a w najgorszym mogą spowodować błędne działanie urządzenia.
Wszystkie niewykorzystane wejścia układów CMOS należy podłączyć, najlepiej do którejś z szyn zasilania.
I oto naocznie przekonaliśmy się, że układy CMOS nawet w spoczynku pobierają prąd, gdy napięcie wejściowe nie jest „czystym” stanem logicznym.
Aby wyjaśnić, dlaczego układ CMOS pobiera prąd gdy napięcie wejściowe ma wartość w okolicach progu przełączania, musimy wrócić do podstawowej „cegiełki” układów CMOS – komplementarnych tranzystorów MOSFET – rysunek 6.
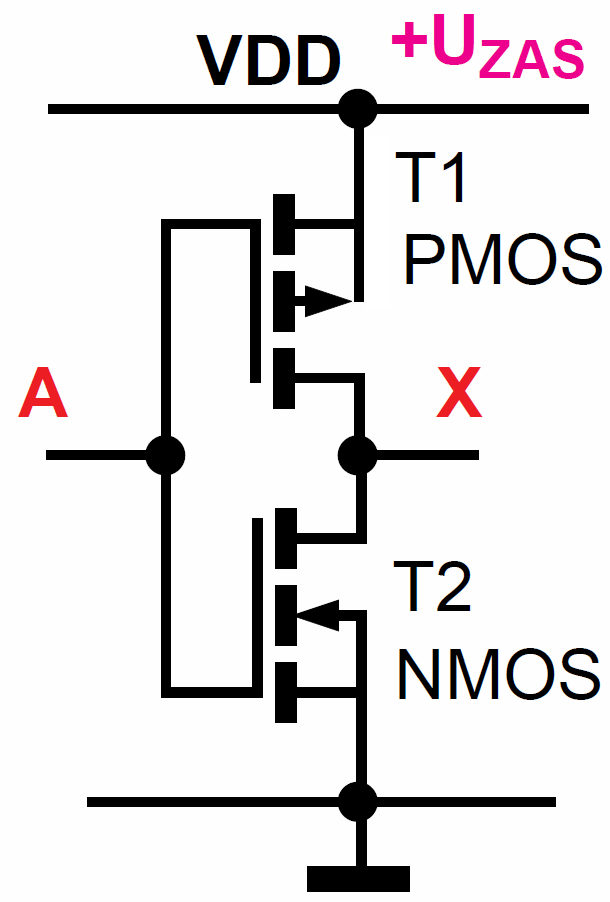
Rysunek 6
W wykładzie 18 słusznie stwierdziliśmy, że gdy na wejściu A występuje „czysty” stan wysoki lub niski, wtedy jeden z tranzystorów jest otwarty, ale drugi jest całkowicie zatkany, więc pobór prądu jest równy zeru. Inaczej jest, gdy na wejście A podamy napięcie około połowy napięcia zasilania – wtedy częściowo otwarte będą oba tranzystory i popłynie przez nie prąd! Czerwone linie na rysunku 7 pokazują zależność tego prądu dla napięcia zasilania 10 V i 15 V.
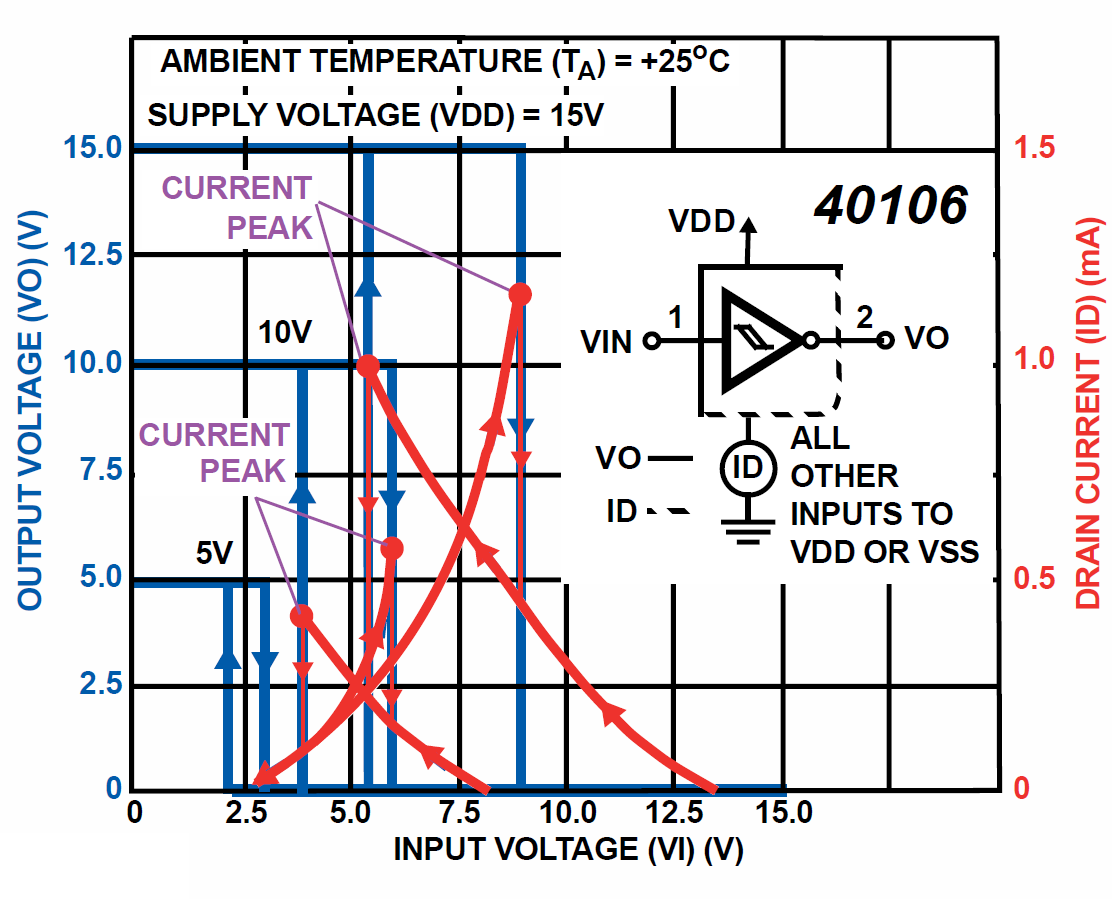
Rysunek 7
Zapamiętaj, że układy CMOS pobierają pewien (nieduży) prąd, gdy napięcia na wejściach nie są czystymi stanami logicznymi, tylko są zbliżone do połowy napięcia zasilania. Czym wyższe napięcie zasilania, tym większy jest ten prąd.
A teraz kolejny aspekt sprawy: w generatorach napięcia wejściowe zmieniają się w okolicach progów przełączania, więc pobór prądu nie dziwi. Ale przecież w większości układów cyfrowych podczas pracy występują „czyste stany logiczne”, a mimo wszystko układy te pobierają prąd.
Wynika to z dwóch powiązanych ze sobą powodów. Po pierwsze prąd jest potrzebny do przeładowania pojemności. Aby to zbadać, do wyjścia Y generatora z rysunku 8 i fotografii 9 dołączaj kondensator C2.
Rysunek 8
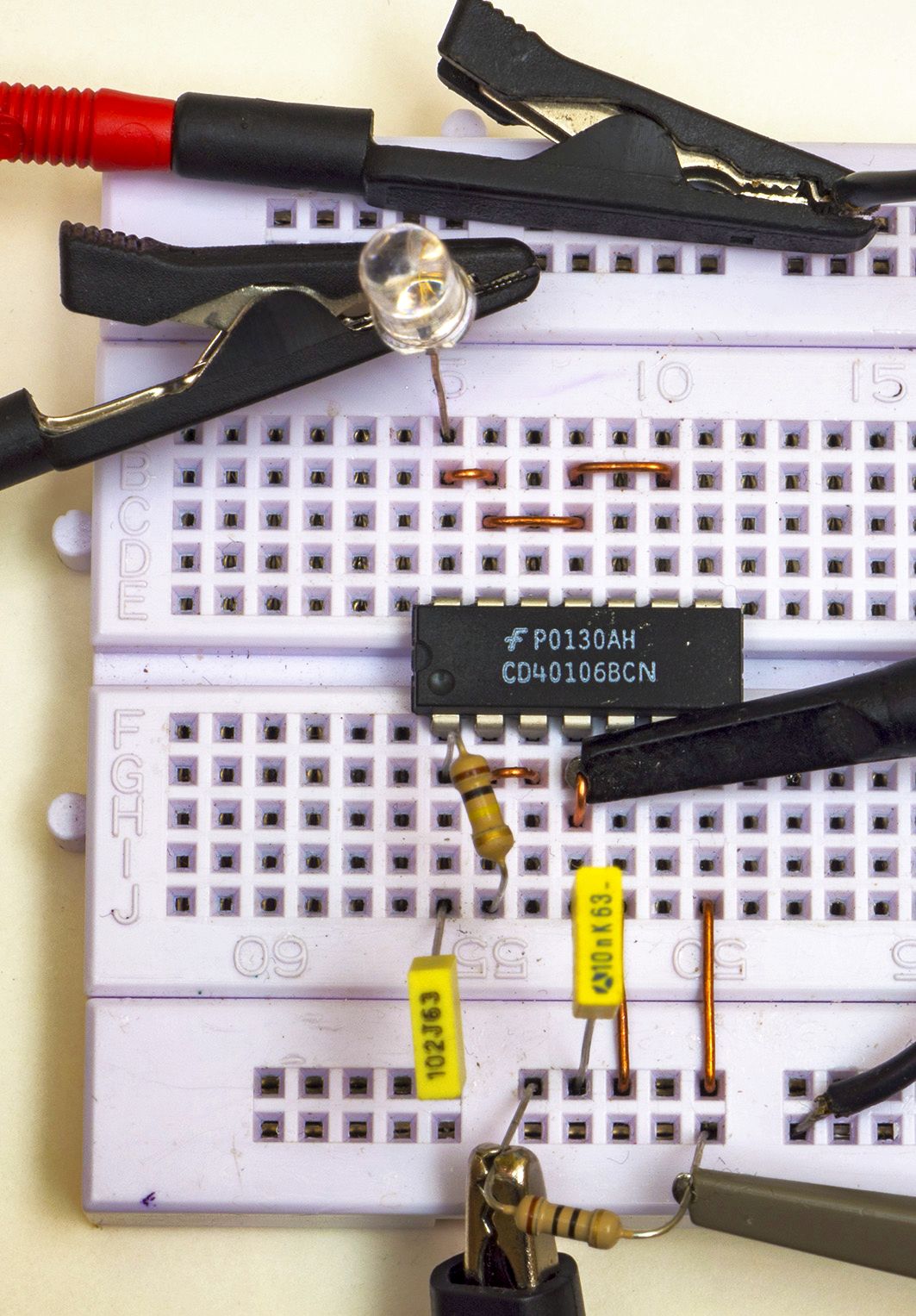
Fotografia 9
Czym większa pojemność C2 jest przeładowywana, tym jaśniej świeci niebieska dioda, czyli układ pobiera więcej prądu. U mnie pobór prądu był następujący:
przy C2=0, IZ = 0,25 mA
przy C2=1 nF, IZ = 0,32 mA
przy C2=10 nF, IZ = 0,89 mA
przy C2=100 nF, IZ = 4,8 mA
przy C2=1 uF, IZ = 5,78 mA
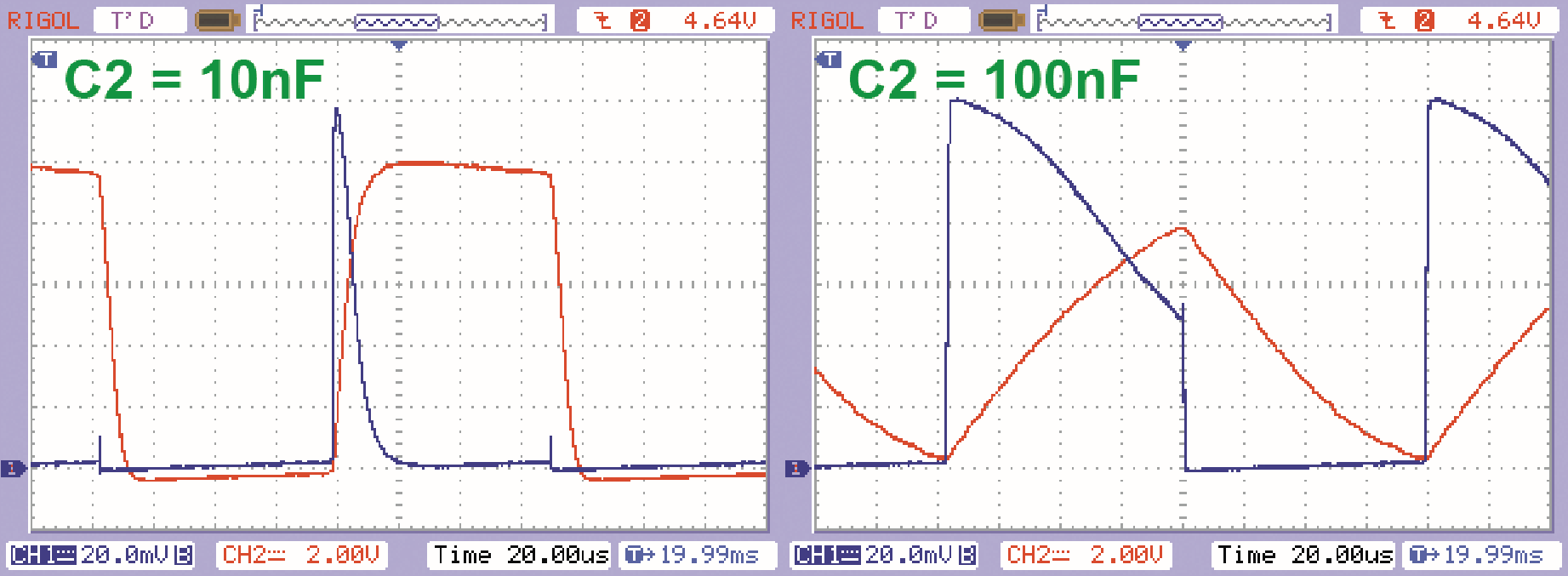
Rysunek 10 pokazuje przebiegi prądu zasilającego układ scalony – kolor niebieski oraz mocno zniekształcone (powinny być prostokątne) przebiegi napięcia wyjściowego w punkcie Y – kolor czerwony przy C2 = 10 nF oraz 100 nF. Gdy w punkcie X pojawia się stan wysoki, ze źródła zasilania zostaje pobrana porcja energii, potrzebna do naładowania pojemności C2. Gdy potem w punkcie X pojawi się stan niski, pojemność C2 zostaje rozładowana przez rezystancję wewnętrzną wyjścia bramki. Prąd nie jest wtedy pobierany ze źródła zasilania, tylko porcja energii zgromadzona w kondensatorze zostaje stracona w postaci ciepła.
Rysunek 10
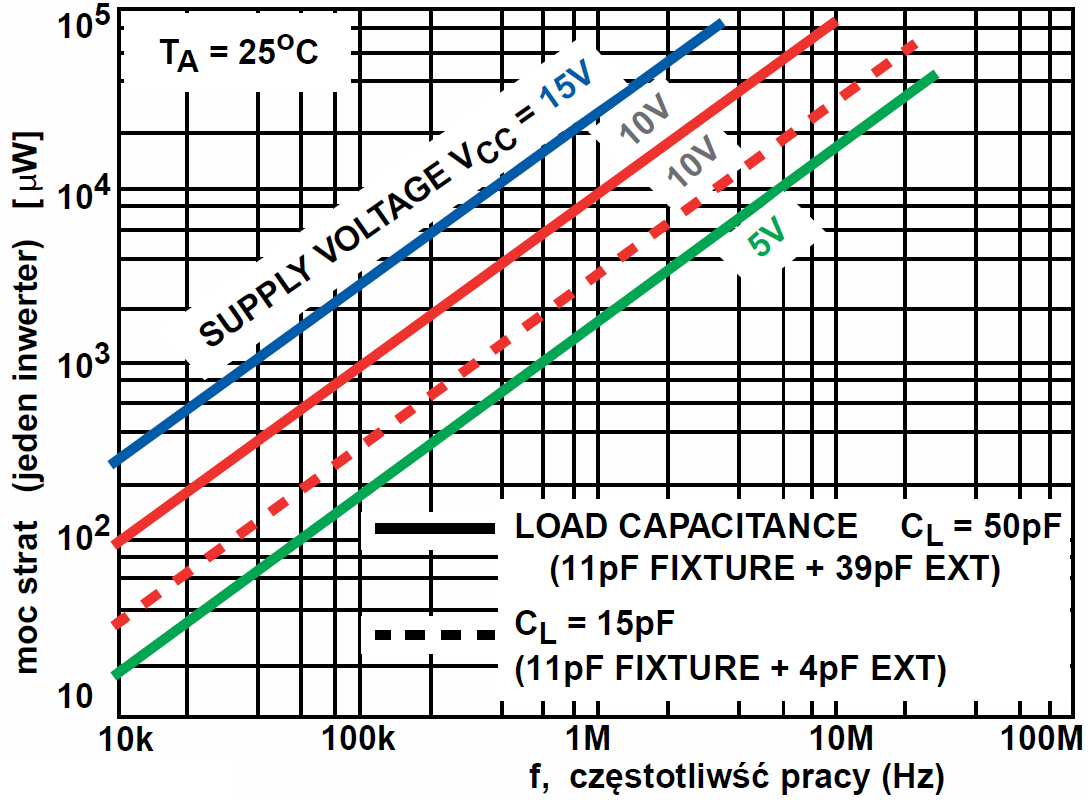
Jak już wiesz, obwody wejściowe tranzystorów MOSFET to poniekąd maleńkie kondensatorki o pojemności kilku pikofaradów. Do tego dochodzą rozproszone pojemności montażowe między ścieżkami i przewodami. I właśnie konieczność przeładowywania tych pojemności jest jednym z powodów zwiększania poboru prądu wraz ze wzrostem częstotliwości przełączania. Rysunek 11 pokazuje zależność poboru prądu (mocy strat) w układach CMOS: czym większa częstotliwość i wyższe napięcie zasilania, tym większy pobór prądu.
Rysunek 11
Drugim powodem poboru prądu jest to, że w rzeczywistych układach stany logiczne nie mogą zmienić się nieskończenie szybko. Wyjścia mają ograniczoną wydajność prądową (tym mniejszą, im niższe jest napięcie zasilania), a tymczasem trzeba przeładować współpracujące pojemności.
Rysunek 12
Fotografia 13
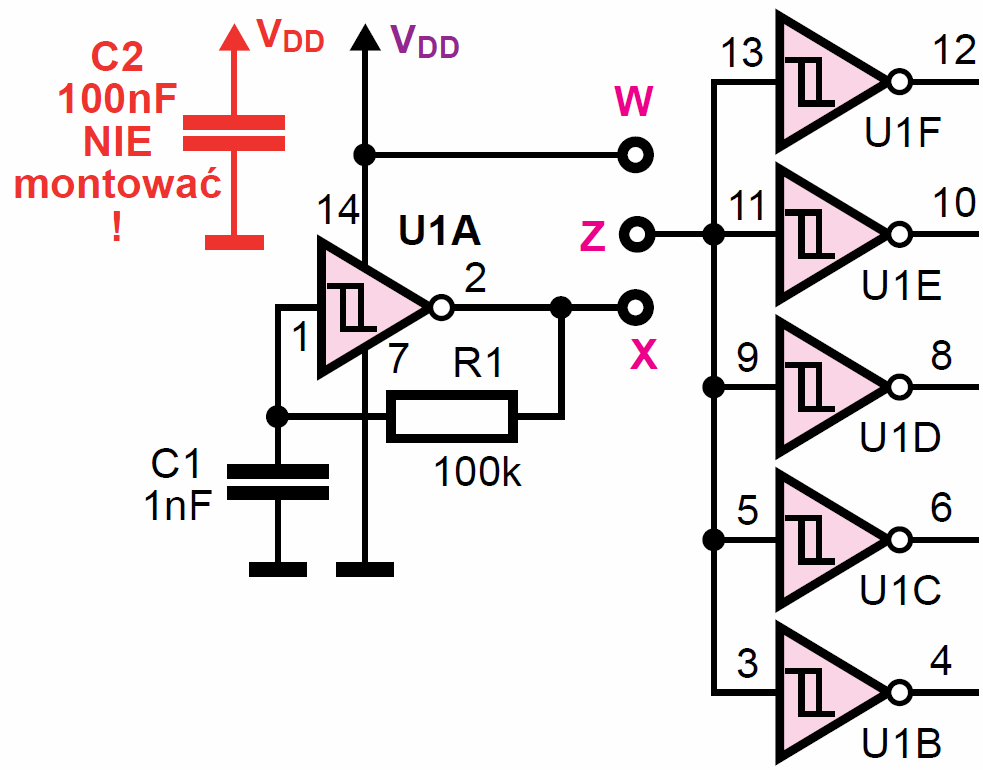
Zmierzyłem oscyloskopem stromość rosnącego zbocza w punkcie X układu z rysunku 12 i fotografii 13 przy zasilaniu napięciem 12 V, gdy punkt Z dołączony był do plusa zasilania (VDD) – rysunek 14a oraz gdy wyjście X zostało obciążone pojemnością pięciu wejść – wtedy stromość zbocza się wyraźnie pogorszyła – rysunek 14b.
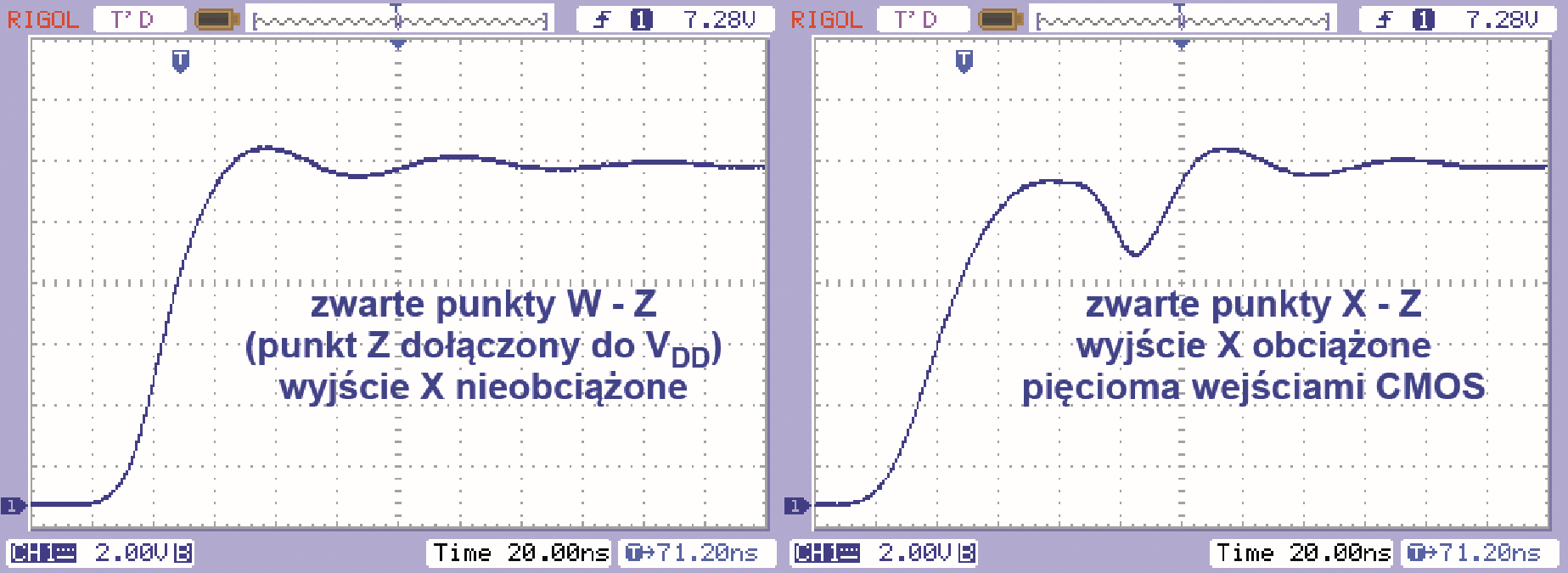
Rysunek 14
W każdym razie w realnych układach zbocza nie są idealnie strome. I tu wracamy do rysunków 6 i 7 – sam układ cyfrowy CMOS pobiera pewien prąd właśnie podczas przełączania, z uwagi na częściowe otwarcie przez chwilę „dolnych” i „górnych” tranzystorów. Z uwagi na pobór prądu najlepiej byłoby, gdyby zbocza były jak najostrzejsze, najkrótsze. Wtedy przy danej częstotliwości przełączania impulsy prądu zasilania będą krótsze i średni pobór prądu będzie mniejszy. Ilustruje to rysunek 15.
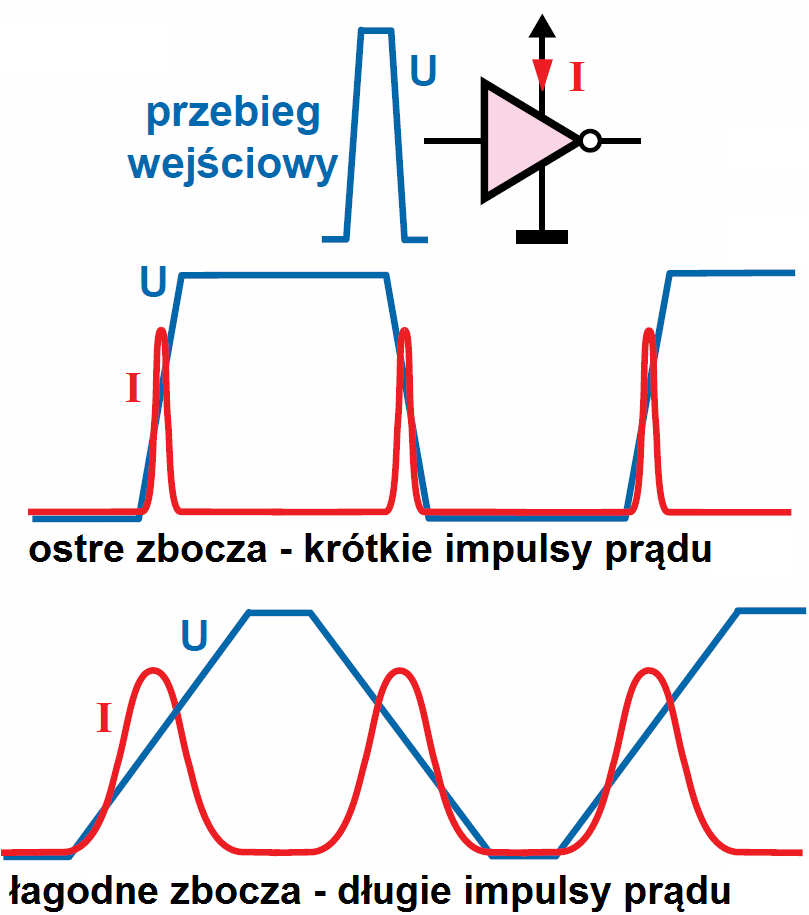
Rysunek 15
Wynika stąd ważny wniosek: w układach cyfrowych CMOS średni prąd zasilania może być niewielki, ale ma postać stromych i silnych impulsów, które wywołują znaczące spadki napięcia na rezystancjach ścieżek i przewodów, a także powodują powstawanie na ich indukcyjnościach przepięć wynikających z samoindukcji oraz drgań rezonasowych.
Rysunek 16a pokazuje przebiegi w układzie z rysunku 12 i fotografii 13 bez kondensatora C2 (X-Z zwarte). Linie czerwone to przebieg napięcia zasilającego na nóżce 14, a niebieskie to przebiegi w punkcie X. Właśnie z uwagi na pasożytnicze indukcyjności i pojemności, impuls prądu zasilania w chwili przełączania powoduje powstanie szkodliwych oscylacji napięcia zasilania. Dodanie w obwodzie zasilania VDD szeregowej indukcyjności 10 mikrohenrów w postaci małego dławika (fotografia 17a) zwiększa takie oscylacje – rysunek 16b. Problem rozwiązuje (rysunek 16c) dodanie w obwodzie zasilania równoległego kondensatora filtrującego C2 = 100 nF, jak na fotografii 17b. Tu masz uzasadnienie, dlaczego zawsze obwody zasilania powinny być filtrowane kondensatorem umieszczonym blisko układu scalonego.

Rysunek 16
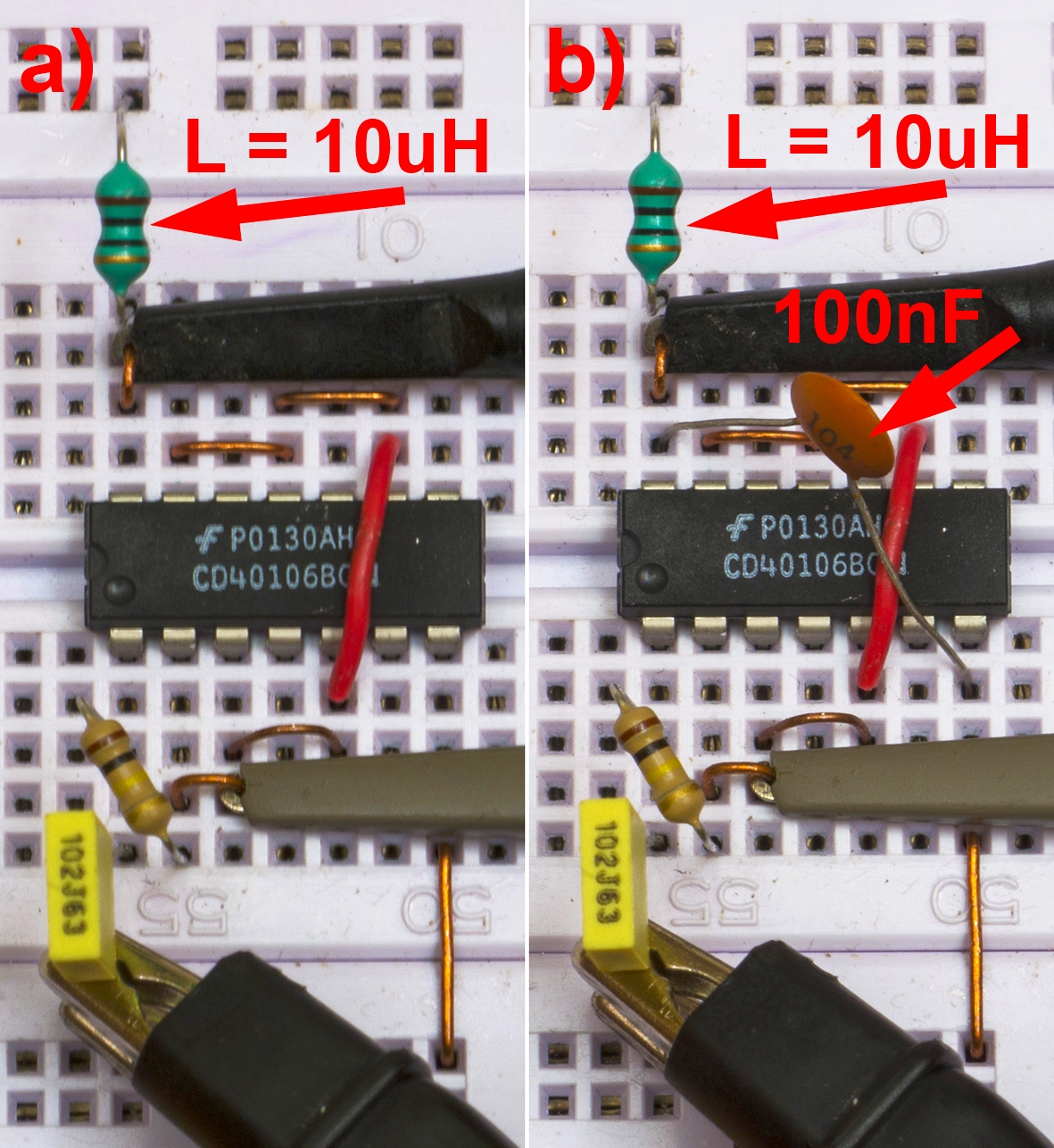
Fotografia 17
Sprawa „śmieci” w układach cyfrowych ma też inny aspekt: otóż już jednostopniowy inwerter CMOS według rysunku 6 przy napięciach wejściowych w okolicach progu przełączania okazuje się być szybkim wzmacniaczem odwracającym o znacznym wzmocnieniu. Każdy „zwykły” inwerter i „zwykła” bramka odwracająca (NAND, NOR) może pełnić rolę wzmacniacza, co sygnalizowałem już w wykładzie 18 na rysunku 19. Zapamiętaj: układy cyfrowe przeznaczone są do pracy „dwustanowej”, ale w rzeczywistości są to wzmacniacze o dużym wzmocnieniu i o dużej szybkości. Gdy na wejściach występują „kanoniczne”, „czyste” stany logiczne, wzmacniacze te są w stanie nasycenia i problemów nie ma. Natomiast gdy na wejściach napięcia są zbliżone do połowy napięcia zasilania, wtedy układy te jak najbardziej są wzmacniaczami o dużym wzmocnieniu i dużej szybkości. W literaturze można znaleźć informacje o wzmocnieniu i paśmie jak na rysunku 18. A to oznacza ryzyko, że po pierwsze może w nich wystąpić samowzbudzenie, a po drugie, że będą wzmacniać jakieś przychodzące z zewnątrz zakłócenia.
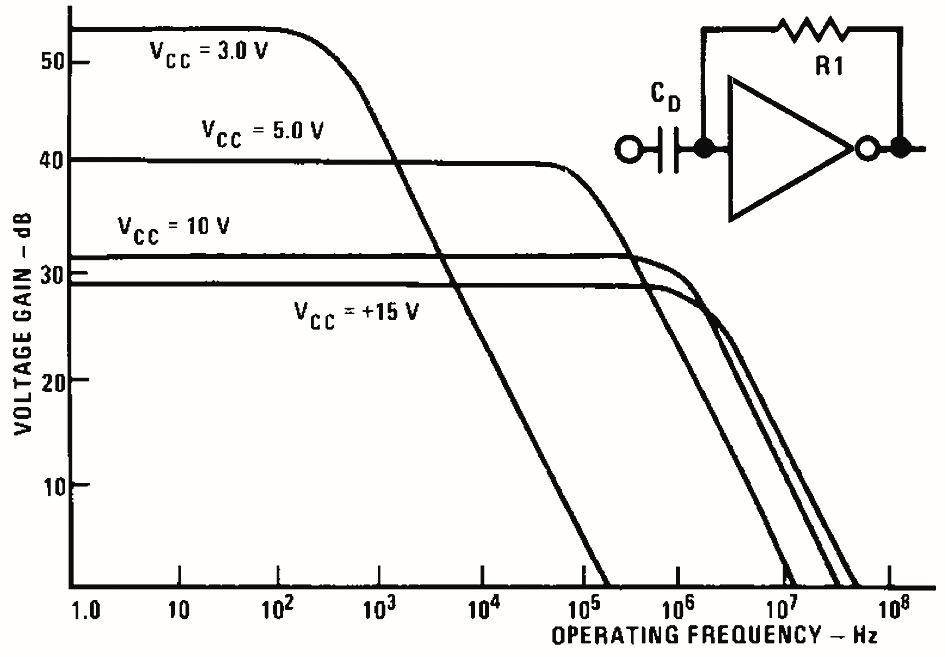
Rysunek 18
I tu dochodzimy do bardzo ważnych wniosków praktycznych: otóż przy powolnych zmianach napięcia wejściowego układy cyfrowe przez pewien czas są najprawdziwszymi wzmacniaczami liniowymi i mogą się wzbudzić. Ilustruje to rysunek 19.
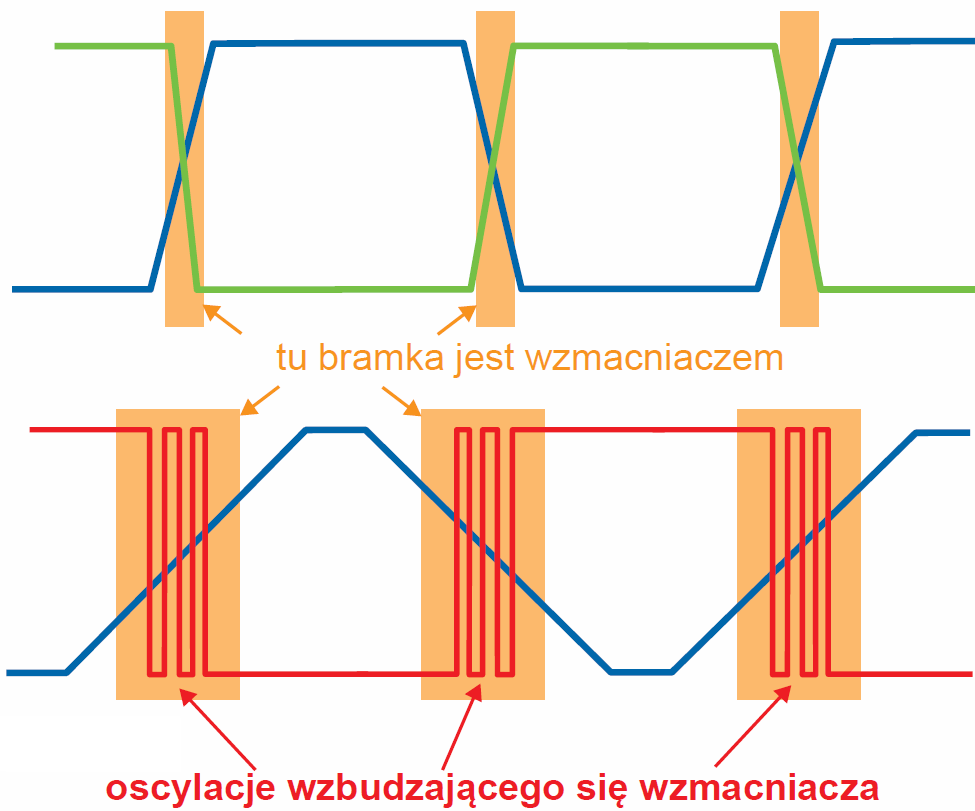
Rysunek 19
Aby zminimalizować, a właściwie usunąć problem, wszystkie zbocza sygnałów cyfrowych powinny być maksymalnie ostre. Czas trwania zboczy powinien być jak najkrótszy, rzędu nanosekund. Przy normalnej współpracy wyjść i wejść układów cyfrowych nie ma z tym problemu, ale przecież w poprzednim wykładzie omawialiśmy współpracę w obwodami RC (także o dużej stałej czasowej, czyli o bardzo łagodnych zboczach) i wtedy jak najbardziej mogłyby się pojawić problemy z niepożądanymi drganiami. Bardzo skutecznym lekarstwem jest zastosowanie układów z wejściami Schmitta, czyli z histerezą. Dzięki występowaniu histerezy na wejściu, układy takie nie boją się nawet bardzo powolnych zmian napięć wejściowych i nie ma drgań przy przełączaniu. I właśnie głównie dlatego, by podczas elementarnego kursu PKE uniknąć takich problemów zdecydowałem, że w zestawie zamiast „zwykłych” inwerterów 4069 i „zwykłych” bramek NAND 4011, wykorzystujemy wersje „ze szmitem”, czyli 40106 i 4093.
Pozostańmy przy problemach „śmieci”, samowzbudzenia i zakłóceń. We wzmacniaczach analogowych o dużym wzmocnieniu przykładaliśmy dużą wagę do filtrowania (odsprzęgania) obwodów zasilania. Podobnie powinno być w układach cyfrowych, ponieważ są one szybkimi wzmacniaczami o dużym wzmocnieniu, pobierają prąd w sposób impulsowy, a silne impulsy prądowe o stromych zboczach powodują powstawanie znaczących spadków napięć i przepięć na rezystancjach i na indukcyjnościach ścieżek i przewodów. Ogólnie biorąc, właśnie ze względu na szybkość i impulsową pracę układów cyfrowych, obwody zasilania i obwody masy w układach cyfrowych są zdecydowanie bardziej „zaśmiecone”, niż w układach analogowych, a powstające zakłócenia mogą być przyczyną błędnej pracy układów cyfrowych. Czym szybsze układy, tym bardziej trzeba na to zwracać uwagę.
Dawniej dobrym zwyczajem elektroników-konstruktorów było stosowanie kondensatora ceramicznego 100 nF blisko końcówek zasilania KAŻDEGO układu cyfrowego oraz kondensatora elektrolitycznego 10 uF…100 uF na każde 10 cyfrowych układów scalonych. Dziś wielu młodych elektroników nie rozumie zagrożeń i lekceważy omawiany problem. Zwykle okazuje się, że brak kondensatora odsprzęgającego (filtrującego) zasilanie nie powoduje problemów, ale gdy już spowoduje i gdy pojawią się zadziwiające błędy w działaniu, wtedy nieświadomy problemu elektronik jest jak dziecko we mgle i gotów jest dopatrywać się w elektronice działania sił nieczystych i magii. Tymczasem przyczyną bardzo dziwnych do wytłumaczenia zachowań układów cyfrowych często są elementarne błędy dotyczące obwodów zasilania: brak kondensatorów filtrujących i zbyt duża rezystancja zbyt wąskich i zbyt długich ścieżek zasilania i masy.
Podsumujmy: zapamiętaj raz na zawsze, że układy CMOS nie pobierają prądu jedynie w spoczynku, przy obecności na wejściach czystych stanów logicznych, natomiast podczas pracy pobór prądu jest tym większy, im większa jest częstotliwość przełączania i czym łagodniejsze (dłuższe) są zbocza impulsów.
Utrwal sobie też drugi bardzo ważny wniosek: układy cyfrowe CMOS są szybkie i pobierają prąd w postaci krótkich impulsów w chwilach przełączania. Silne impulsy prądu zasilania mogą wywołać znaczące spadki napięcia i oscylacje na rezystancjach i indukcyjnościach montażowych. Aby zmniejszyć poziom takich zakłóceń, należy odpowiednio filtrować obwody zasilania układów cyfrowych. Zazwyczaj wystarcza zastosowanie w układzie cyfrowym jednego kondensatora ceramicznego 100 nF i jednego elektrolitycznego 10…220 uF według rysunku 20. Dobrym zwyczajem jest stosowanie kondensatora ceramicznego 10…100 nF jak najbliżej końcówek zasilania każdego układu scalonego.
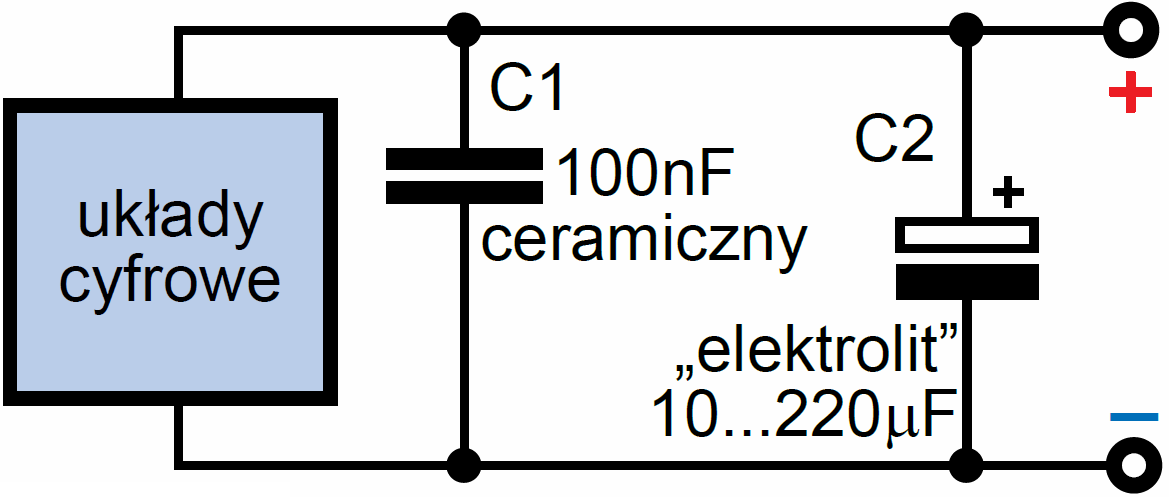
Rysunek 20
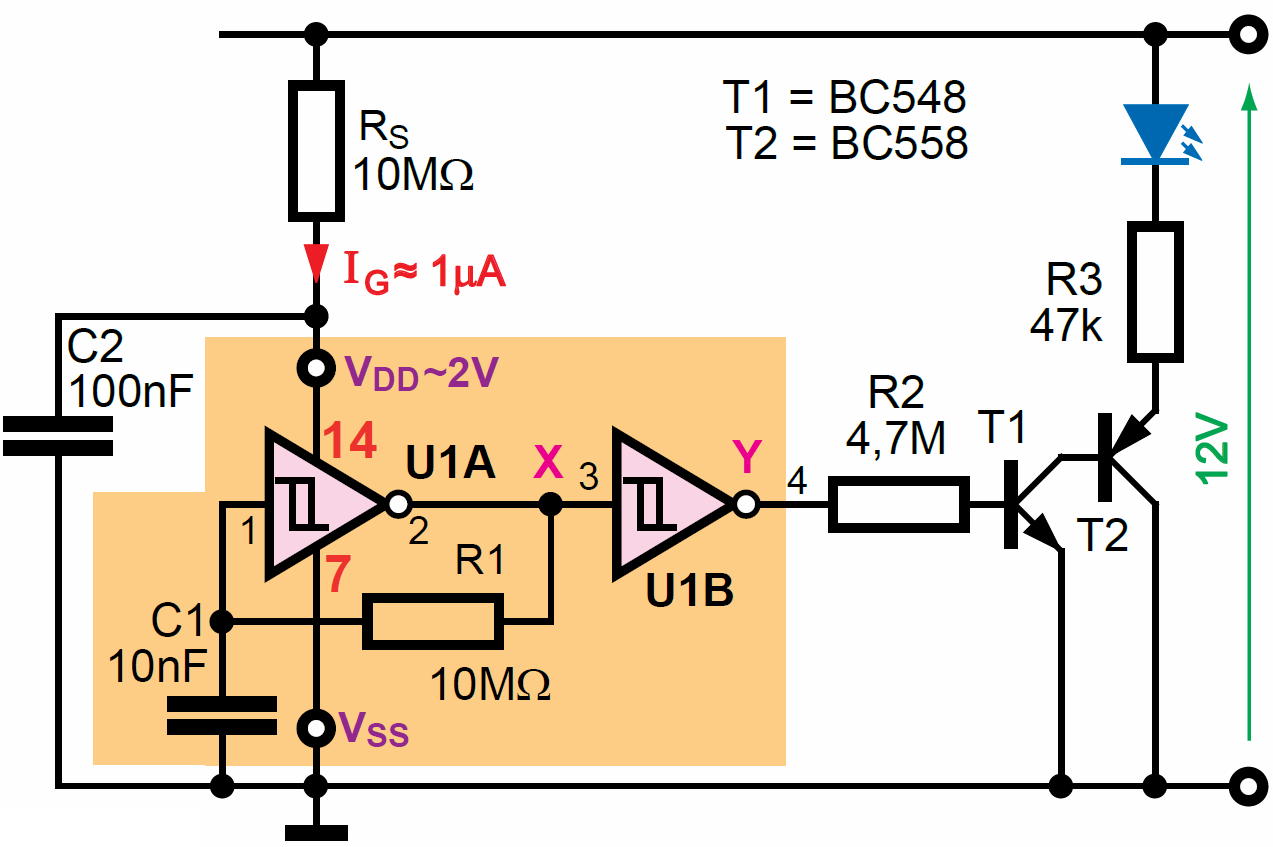
A teraz zbudujmy kilka pożytecznych układów: W niektórych generatorach RC bardzo zależy nam na jak najmniejszym poborze prądu, co osiągamy stosując jak największą wartość rezystancji R i obniżając napięcie zasilające nawet poniżej katalogowej dla CMOS4000 granicy 3 V. Często w obwodzie zasilania stosujemy szeregowy rezystor ograniczający prąd (plus kondensator filtrujący zasilanie) i pozwalamy, żeby napięcie zasilania „samo się dobrało”. Tego typu rozwiązanie wykorzystaliśmy w dwóch układach tytułowych. W układzie z rysunku 21 i fotografii 22 taki szeregowy rezystor ma aż 10 megaomów, dzięki czemu przy zasilaniu 12 V sam generator (IG) pobiera około 1 uA. Tak! tylko 1 mikroamper prądu!
Rysunek 21
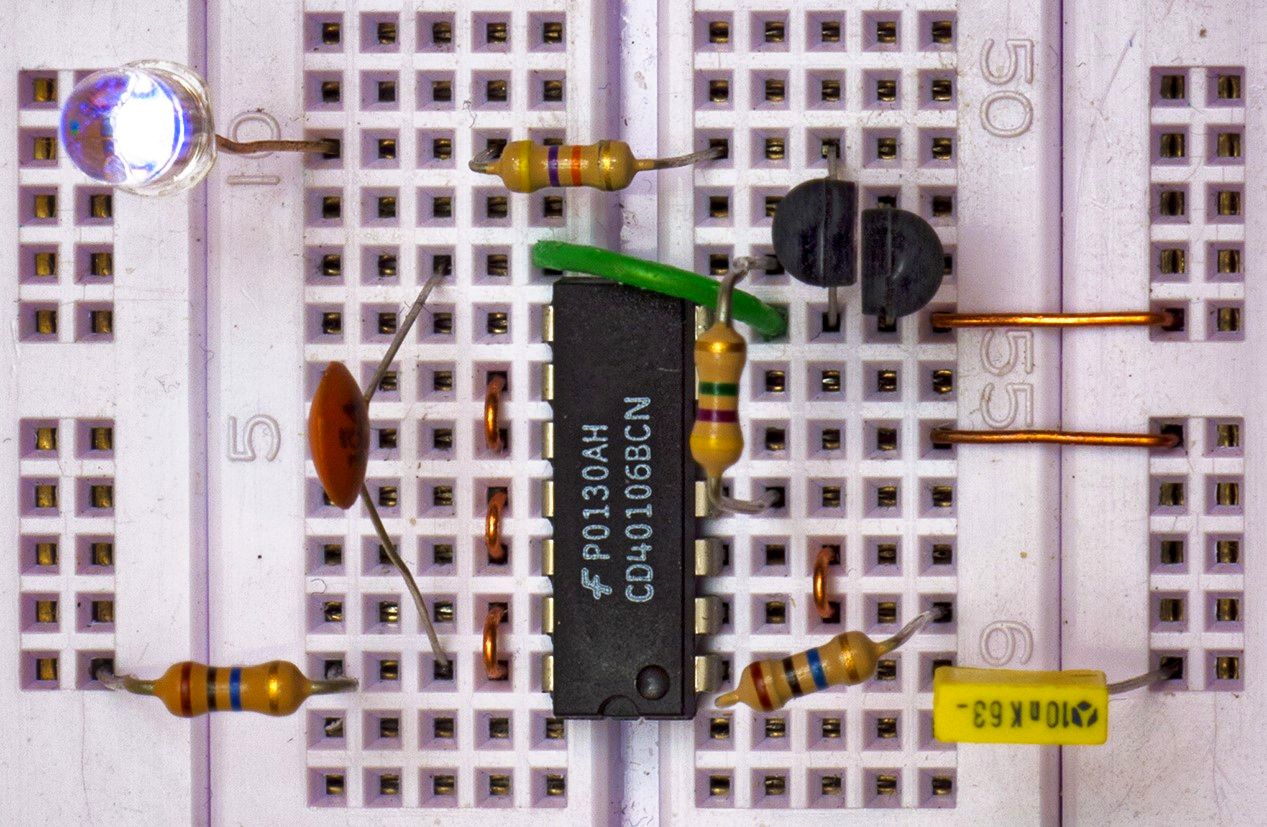
Fotografia 22
W moim modelu napięcie zasilające UG wynosiło około 2 V. Przy tak niskim napięciu zasilania wydajność prądowa wyjść jest bardzo mała i trzeba zastosować „tranzystory pośredniczące” T1, T2.
Przeprowadziłem też próby tego układu ze zwartym rezystorem RS. Ten egzemplarz kostki 40106 pracował już od napięcia 1,48 V. Rysunek 23 pokazuje przebiegi w punktach X (niebieski) i Y (czerwony) przy dołączeniu między nóżkę 4 a masę rezystora 22 kΩ – jak widać, wydajność prądowa wyjścia jest wtedy bardzo mała, rzędu 25 mikroamperów.
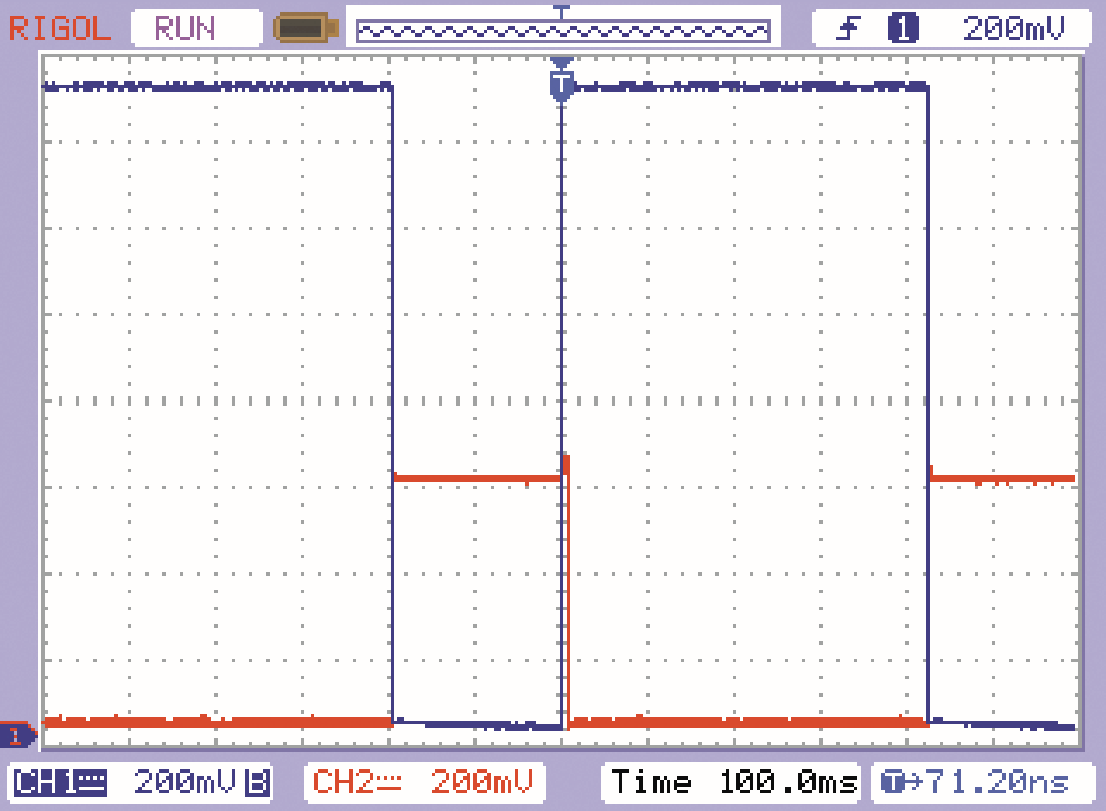
Rysunek 23
Zmierzyłem też pobór prądu przy kilku wartościach napięcia zasilania:
przy VDD = 3 V IG ~ 4 uA
przy VDD = 4 V IG ~ 16 uA
przy VDD = 5 V IG ~ 36 uA
przy VDD = 7 V IG ~ 0,1 mA
przy VDD = 9 V IG ~ 0,2 mA
przy VDD = 12 V IG ~ 0,4 mA
przy VDD = 15 V IG ~ 0,6 mA
Inne egzemplarze dadzą inne wyniki, ale w każdym razie przy niskich napięciach zasilania pobór prądu jest zaskakująco mały.
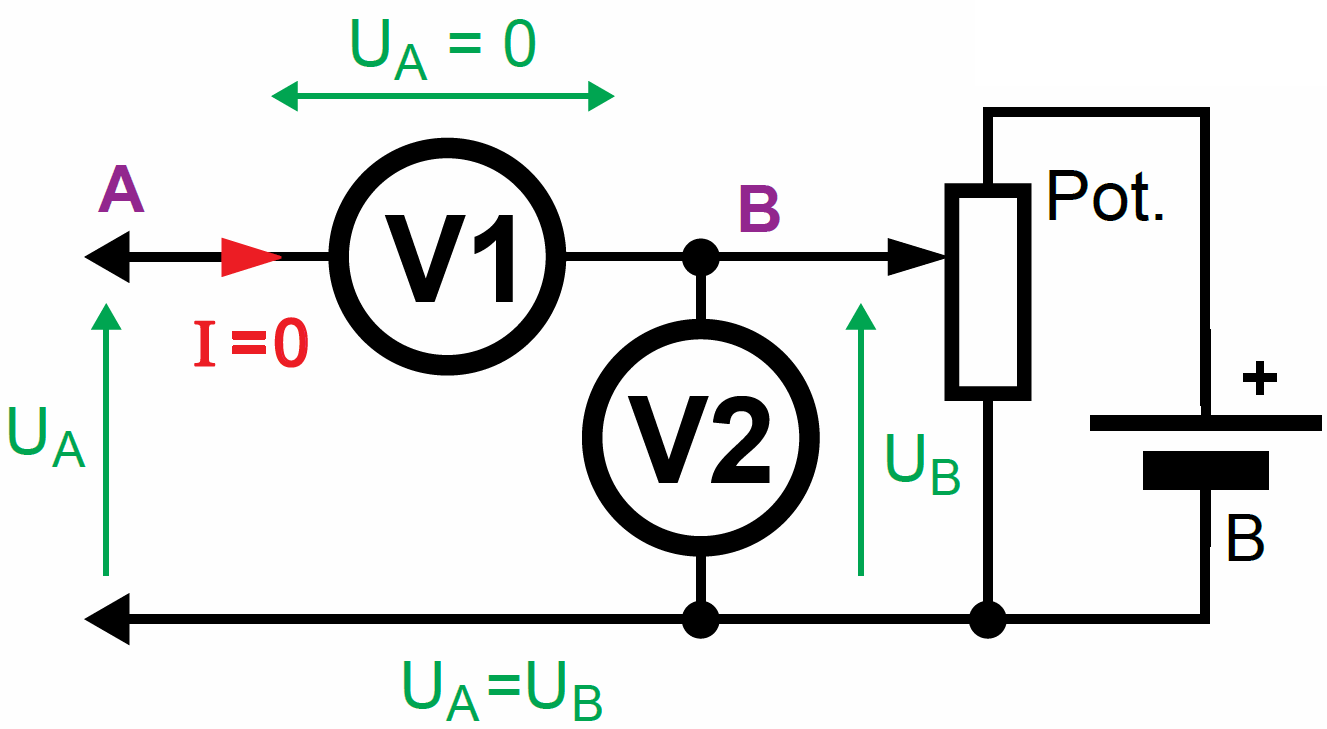
Przy bardzo małych prądach trudno jest zmierzyć napięcie, bo woltomierz w tanich multimetrach ma rezystancję wejściową 1 MΩ i dołączenie jej powoduje duże błędy. Napięcie stałe można zmierzyć zupełnie nie obciążając układu metodą kompensacyjną, na przykład według rysunku 24. Potencjometr należy tak ustawić, żeby woltomierz V1 pokazywał zero – wtedy napięcie UA jest równe napięciu UB , czyli wskazaniom woltomierza V2.
Rysunek 24
Jest też kłopot z pomiarem bardzo małych prądów. Zwykle najniższy zakres (mikro)amperomierza to 2000 uA, ale dużo mniejsze prądy można mierzyć za pomocą… woltomierza. Możesz na przykład zmierzyć prąd upływu kondensatora elektrolitycznego według rysunku 25. Wskazania woltomierza należy podzielić przez jego wewnętrzną, wbudowaną rezystancję (wynoszącą 1 MΩ lub 10 MΩ – trzeba zajrzeć do instrukcji). Tanie multimetry o rezystancji 1 MΩ na najniższym zakresie 200,0 mV pozwalają mierzyć prądy do 0 … 200 nA z rozdzielczością 0,1 nA!
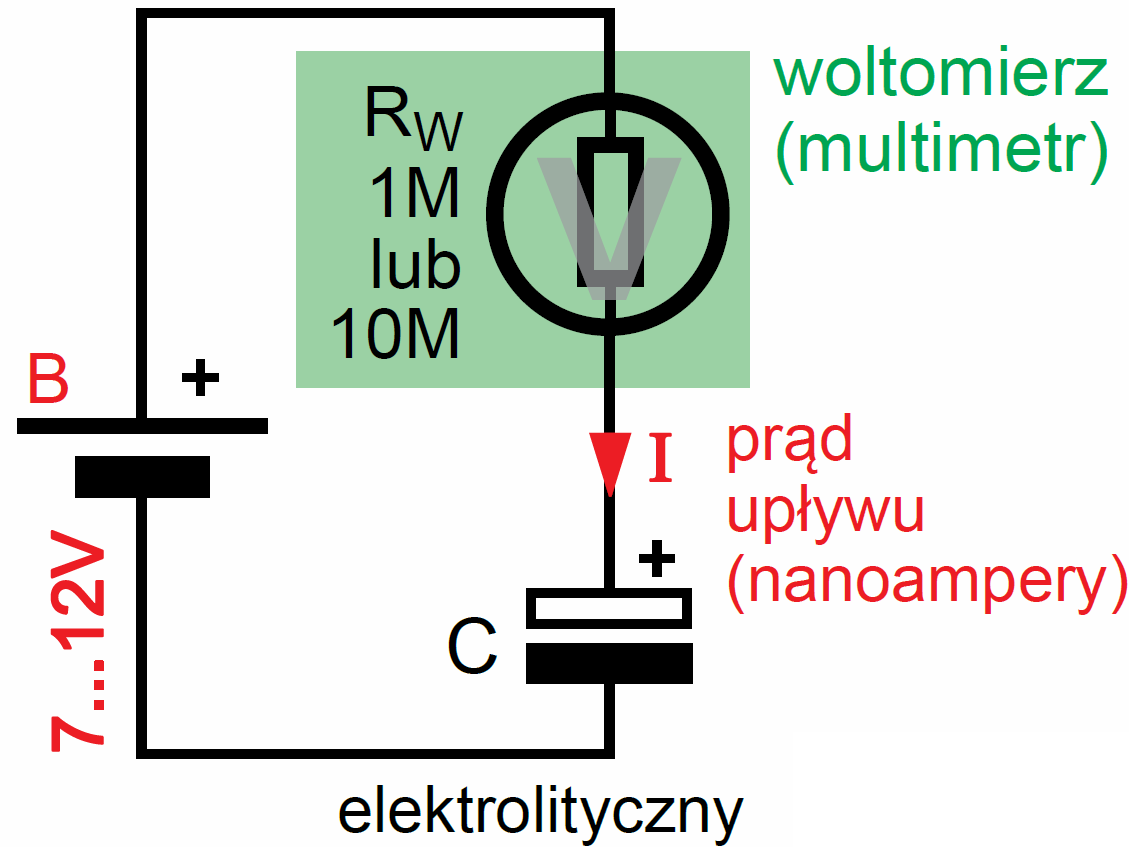
Rysunek 25
A jeśli jesteśmy przy bardzo małych prądach, możesz zmierzyć prąd wsteczny diody, a ściślej fotodiody. Zestaw układ według rysunku 26a. Niebieska dioda LED2 jest tylko po to, żeby obniżyć napięcie na diodzie Odczytaną wartość napięcia podziel przez rezystancję wewnętrzną woltomierza (1 MΩ lub 10 MΩ). Sprawdź, jak zmienia się prąd pod wpływem oświetlenia. U mnie prąd ciemny struktur, niezależny od oświetlenia nie przekraczał 5 nanoamperów, a po oświetleniu diody zwiększał się do ponad 20 nA.
Następnie zbuduj układ czujnika światła według rysunku 26b. Spróbuj tak dobrać rezystor R1 (który likwiduje wpływ prądu zerowego, niezależnego od oświetlenia), żeby przy świetle brzęczyk pracował, a w ciemności (np. w szufladzie) milczał.
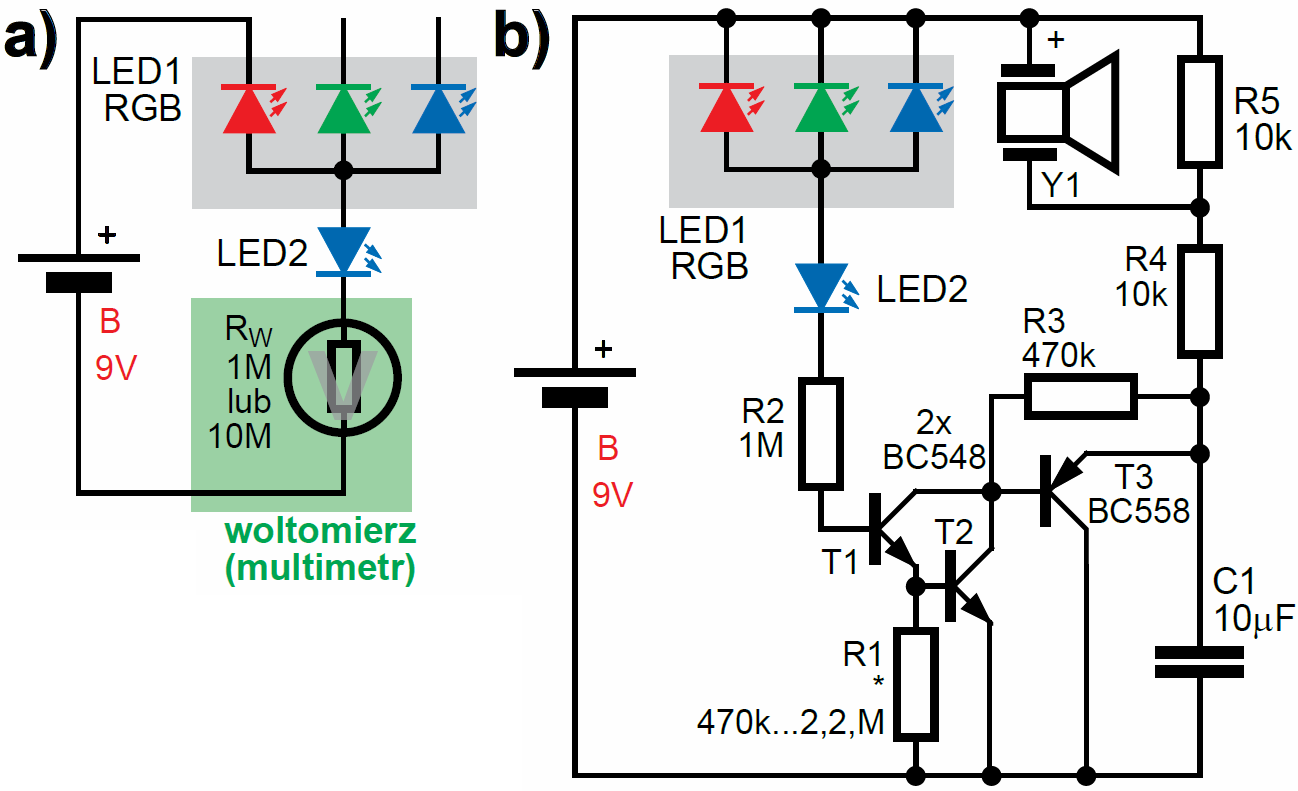
Rysunek 26
Jeżeli to się uda (co zależy od właściwości użytych tranzystorów i diody LED RGB), wtedy rozbuduj układ według rysunku 27 i fotografii 28 tworząc Inteligentny efekt RGB, który będzie się automatycznie włączał po zapadnięciu zmroku. Dioda LED RGB, oprócz swojej podstawowej funkcji, pełni też rolę fotodiody – czujnika światła.
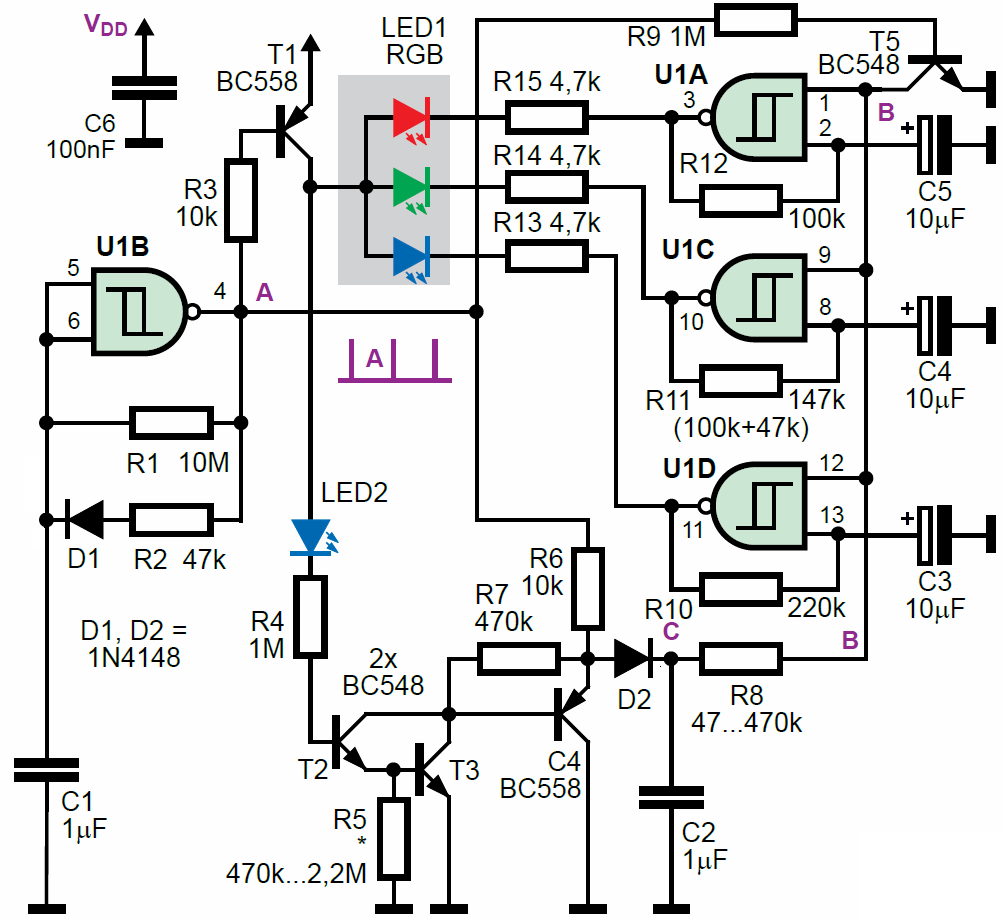
Rysunek 27
Generator na bramce U1B wytwarza w punkcie A wąskie dodatnie szpilki. Przez większość czasu tranzystor T1 jest otwarty i umożliwia pracę trzech generatorów U1A, U1C, U1D, dających różnokolorowy efekt świetlny. Gdy w punkcie A pojawi się stan wysoki, T1 zostaje zatkany. Tranzystor T5 wymusza w punkcie B stan niski, czyli na wyjściach generatorów stan wysoki, przez co dioda LED RGB może pracować jak na rysunku 26b. W tym krótkim czasie kilkudziesięciu milisekund układ sprawdza jasność otoczenia. Jeżeli jest widno, tranzystory T2…T4 przewodzą, kondensator C2 pozostaje rozładowany, w punkcie C i D jest stan niski, więc generatory U1A, U1C, U1D nie pracują. Efekt świetlny pozostaje wyłączony. Gdy jednak zrobi się ciemno, tranzystory T2…T4 pozostaną zatkane, a kondensator C2 naładuje się przez R6 i diodę D2, w czym nie przeszkodzi R8 o znacznie większej rezystancji. W punktach C, B na dłuższy czas pojawi się stan wysoki. Gdy znów w punkcie A pojawi się stan niski, T5 zostanie zatkany i zaczną pracować generatory U1A, U1C, U1D. Dla lepszego efektu, światło diody LED RGB dobrze byłoby rozproszyć, choćby za pomocą matowej torebki foliowej.
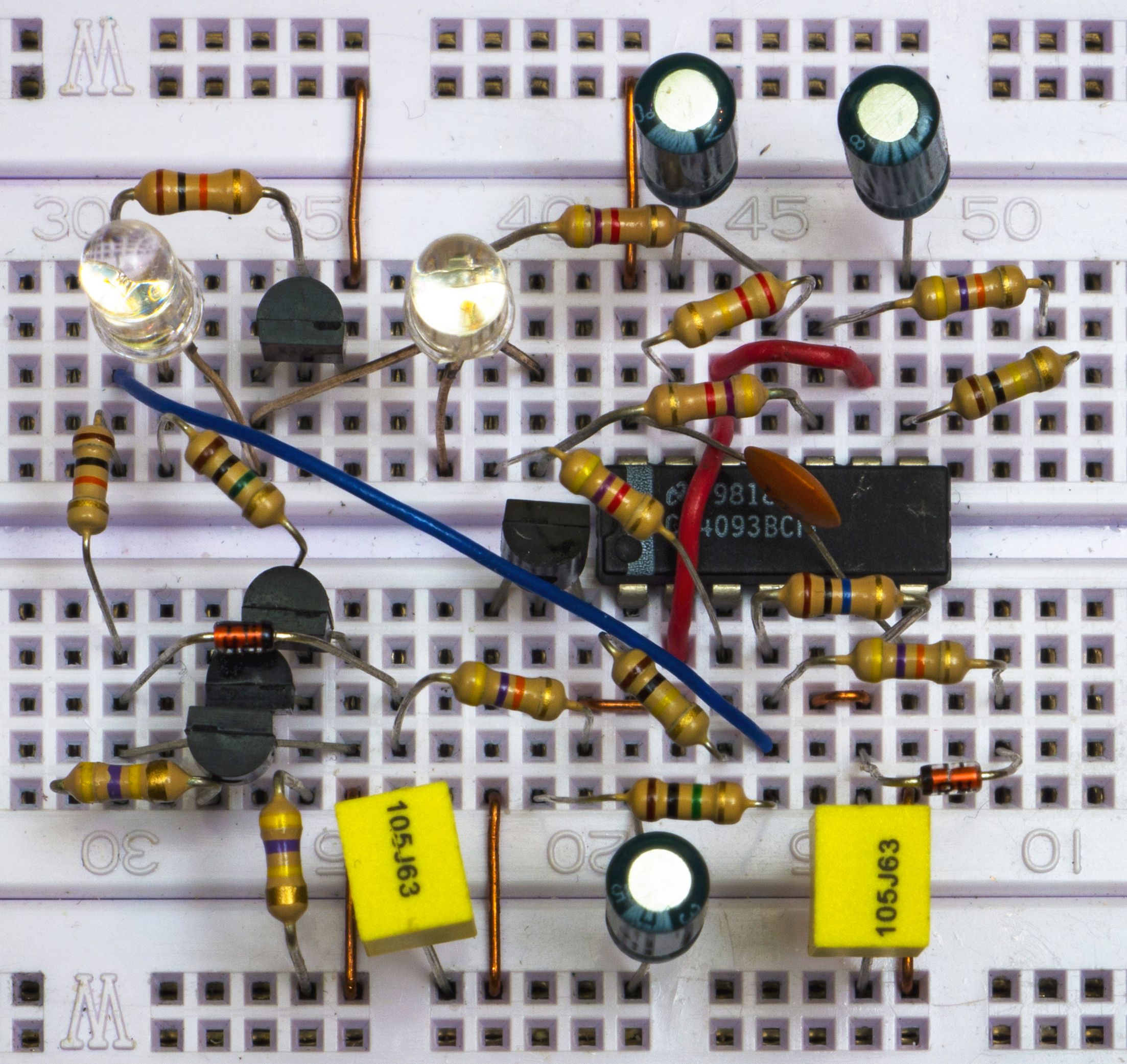
Fotografia 28
R5 trzeba dobrać, żeby czujnik światła reagował na zmiany oświetlenia, ale z uwagi na pracę z ekstremalnie małymi prądami i rozrzut parametrów LED RGB i T2…T4 nie mogę zagwarantować, że uzyskasz taki sam efekt, jak w moim modelu (z R5 = 470 kΩ, R8 = 47 kΩ).
W następnym wykładzie zajmiemy się bliżej przerzutnikami.
Piotr Górecki


