Pierwsze kroki w cyfrówce – część 8
W poprzednim odcinku zajęliśmy się podstawowymi układami opóźniającymi. W tym odcinku przyjrzymy się bliżej układom przerzutników monostabilnych.
Umiesz już dowolnie opóźniać oraz skracać impulsy.
Nieprzypadkowo zachęcałem cię do zaprzyjaźnienia się z „kostkami Schmitta”. Przy czasach opóźnienia większych niż kilka mikrosekund, koniecznie trzeba stosować takie właśnie bramki. Stosując te bramki i kondensatory elektrolityczne możesz uzyskać bardzo długie czasy, nawet rzędu minut. W układach z rysunków: 5, 6 i 7 w poprzedniej części możesz stosować kondensatory elektrolityczne o dowolnie dużej pojemności, bylebyś tylko zachował ich właściwą biegunowość. Ale tu czeka na ciebie pewna pułapka: jeśli w twoim układzie aluminiowe kondensatory elektrolityczne cały czas będą pozostawać bez napięcia, to na pewno rozformują się, wzrośnie ich prąd upływu i w konsekwencji układ na pewno nie będzie pracował. Nie znaczy to, że zwykłe elektrolity się nie nadają do układów czasowych – nadają się. Jeśli jednak chcesz zastosować aluminiowe elektrolity, to musisz włączyć je tak, aby w stanie spoczynku były pod napięciem – na rysunku 1 zobaczysz różne możliwości.
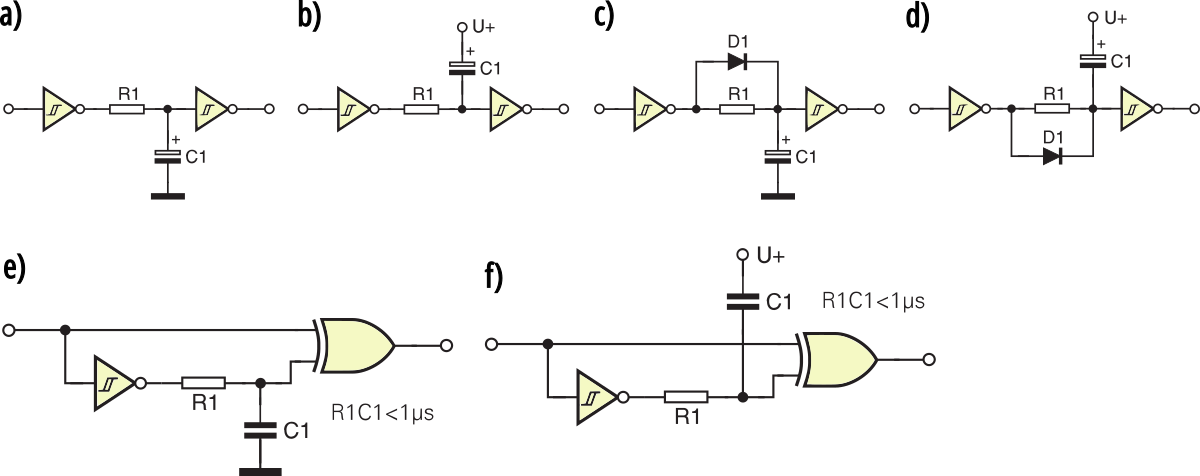
Rysunek 1
Wersje 1a i 1b, oraz 1c i 1d a także 1e i 1f są równoważne – o tym którą z nich wybrać zadecydują stany, jakie w stanie spoczynku (lub też przez większość czasu) występują na wyjściu pierwszej bramki.
Ze względu na wzrost prądu upływu aluminiowych elektrolitów, przechowywanych bez napięcia, NIGDY nie stosuj ich w układach, które będą włączane tylko dorywczo. To częsty błąd popełniany nie tylko przez początkujących. Widziałem już kilka układów alarmowych, montowanych przez „profesjonalistów”, gdzie zwykłe elektrolity w obwodach czasowych wręcz latami były pozostawione bez napięcia. Oczywiście wtedy, gdy alarm wreszcie powinien zadziałać, nie zadziała właśnie przez takie elektrolity.
Pamiętaj o tym, to bardzo ważne!
Jeśli obawiasz się zastosowania aluminiowych elektrolitów, zastosuj kondensatory tantalowe; mają one zdecydowanie mniejszy prąd upływu i się nie rozformowują. Innym rozwiązaniem będzie wykorzystanie kondensatora stałego (foliowego MKT, MKSE) o pojemności 1…2,2 μF i tranzystora. Dwa przykładowe układy znajdziesz na rysunku 2.
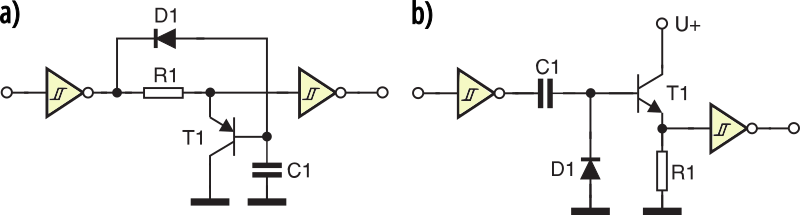
Rysunek 2
Czas opóźnienia lub czas impulsu zwiększy się mniej więcej tyle razy, ile wynosi wzmocnienie prądowe tranzystora, czyli kilkadziesiąt do kilkuset razy. Dioda służy do rozładowania kondensatora po przyjściu drugiego, nieaktywnego zbocza przebiegu. Ale i tu tkwi pewna pułapka: Długi czas uzyskuje się kosztem radykalnego zmniejszenia prądu ładowania niewielkiego kondensatora. Prąd ten jest rzędu nanoamperów. Takiego rzędu prądy upływu mogą też płynąć po powierzchni brudnej płytki, która kilka lat będzie pracować w zakurzonym i zawilgoconym otoczeniu. Dlatego stosując sposób z rysunku 2 koniecznie trzeba polakierować płytkę dobrym lakierem izolacyjnym.
Szczerze mówiąc, dla układów, które mają długo i niezawodnie pracować, radzę ci raczej właściwe wykorzystać elektrolity (rysunek 1), najlepiej tantalowe, niż układy z tranzystorem (rysunek 2). Dobrym sposobem jest też użycie kostek zawierających liczniki (np. CMOS4060, CMOS4541) – takie metody przedstawię ci w jednym z następnych artykułów.
Do tej pory mówiliśmy o opóźnianiu i skracaniu impulsów. Bardzo często potrzebne są układy, które pobudzone – generują impuls o określonej długości.
Wykorzystaj do tego jeden z układów pokazanych na rysunku 3.

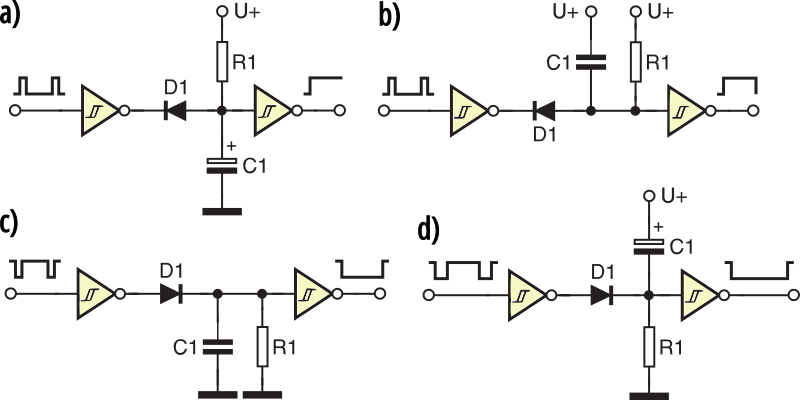
Rysunek 3
Ponieważ występuje tu silne dodatnie sprzężenie zwrotne, nie musisz stosować bramek „ze szmitem”, nawet przy długich czasach i wykorzystaniu (tantalowego) elektrolita w roli C1. W zasadzie są to układy wyzwalane krótkim impulsem: ujemnym – rysunek 3a lub dodatnim – rysunek 3b. Czasem potrzebne jest wyzwalanie zboczem – wtedy wystarczy na wejściu zastosować tzw. różniczkujący obwód RC o małej stałej czasowej, rzędu mikrosekund czy milisekund. Z kolei jeśli po zakończeniu cyklu potrzebne jest szybkie rozładowanie kondensatora (by przygotować układ do nowego cyklu), wtedy równolegle do rezystora trzeba włączyć diodę. Warto zauważyć, że włączenie diody skutecznie rozwiązuje problemy z rozładowaniem kondensatora i przepływem prądów wejściowych bramki, zasygnalizowane przy omawianiu rysunku 7 w poprzedniej części i w żadnych okolicznościach nie trzeba stosować pokazanego tam szeregowego rezystora ograniczającego. Tak zmodyfikowany przerzutnik monostabilny pokazany jest na rysunku 3c.
Układy z rysunku 3 są użyteczne w praktyce, mają też pewną cechę, która niekiedy jest zaletą, a niekiedy wadą. Mianowicie pierwszy nadchodzący krótki impuls powoduje uruchomienie naszego przerzutnika monostabilnego (zwanego też przerzutnikiem jednostabilnym, uniwibratorem lub monowibratorem) i przerzucenie go do tak zwanego stanu wzbudzenia na czas wyznaczony wartością elementów R1, C1. Jeśli w trakcie trwania tego wzbudzenia, na wejściu pojawi się nastepny krótki impuls, to zostanie on zignorowany – nie będzie miał żadnego wpływu na czas trwania impulsu wyjściowego. W praktyce często potrzebne nam są układy monostabilne, w których każdy kolejny nadchodzący krótki impuls wejściowy będzie przedłużał czas trwania impulsu na wyjściu. W angielskiej literaturze spotyka się określenie retrigger (powtarzane wyzwalanie), które wskazuje na możliwość takiego przedłużania impulsu. W licznych książkach do wszelkich obwodów uzależnień czasowych proponuje się wykorzystanie specjalizowanych układów scalonych. Kiedyś dawno rzeczywiście stosowano powszechnie kostkę 74121, ale nie miała ona możliwości przedłużania impulsu. Stosowano też kostki 74123, a także podwójne wersje obu kostek.
Ja osobiście nie polecam ci tych staroci. Układy uzależnień czasowych wykonasz w prosty sposób, bez specjalizowanych kostek, stosując kilka negatorów czy bramek NAND „ze szmitem” i ewentualnie diodę lub tranzystor. Na poprzednich rysunkach pokazałem ci sporą kolekcję odpowiednich schematów. Pora na następne. Właściwie samą ideę już ci je podałem na rysunku 6 w poprzedniej części. Na rysunku 4 zobaczysz kilka przykładów przerzutników monostabilnych, uniwibratorów z możliwością przedłużania impulsu wyjściowego. Te proste układy są naprawdę przydatne i znakomicie sprawdzają się w większości zastosowań. Musisz tylko zwrócić uwagę na dwie sprawy.
Rysunek 4
Po pierwsze, jak widzisz na rysunkach 4a i 4d możesz uzyskać dowolnie długie czasy stosując kondensatory elektrolityczne i rezystory rzędu 1 MΩ. Przy stosowaniu zwykłych elektrolitów zapewne zechcesz, by w spoczynku były pod napięciem – właśnie układy z rysunków 4a i 4d spełniają ten warunek. Musisz jednak wziąć pod uwagę, że przy włączaniu zasilania kondensatory te zaczną się ładować przez rezystory, co spowoduje wygenerowanie impulsu po każdym włączeniu zasilania. Inaczej jest w układach z rysunków b oraz c. Tu przy włączaniu zasilania nic się nie będzie działo, ale kondensatory w spoczynku pozostają bez napięcia – dlatego narysowałem tam kondensatory stałe.
Teraz druga sprawa.
Specjalizowane układy scalone są wyzwalane zboczem, to znaczy, że cykl zaczyna się po pojawieniu się odpowiedniego zbocza. Wtedy długość impulsu wyzwalającego nie odgrywa żadnej (lub prawie żadnej) roli. W prostych układach z rysunku 4 czas trwania impulsu wyzwalającego ma znaczenie. Jeśli impuls wejściowy będzie za krótki, to kondensator nie zdąży się w pełni naładować (rozładować) przez diodę D1. Minimalny czas impulsu wyzwalającego możesz oszacować obliczając stałą czasową RoC1, gdzie C1 to dołączona pojemność , a Ro to rezystancja wyjściowa współpracującej bramki (wcześniej, przy okazji omawiania rysunku 1 w tej części podałem ci przybliżone wartości). Przykładowo, jeśli chcesz uzyskać długi czas impulsu wyjściowego, zastosuj kondensator elektrolityczny i zewnętrzny rezystor o wartości: 1…3,3 MΩ (rezystorów o większej wartości nie polecam ci ze względu na wspomniane prądy upływu zakurzonej i wilgotnej płytki). Przy pojemności 100 μF uzyskasz czas impulsu wyjściowego ponad minutę. Policz potrzebny minimalny czas trwania impulsu wyzwalającego. Jeśli twój układ zawiera negatory 40106 lub bramki 4093 i pracuje przy napięciu zasilania równym 5 V przyjmij, że rezystancja wyjściowa bramki wyniesie 1 kΩ. Stała czasowa Ro x C1 wynosi 100 μF x 1 kΩ = 100 ms. Przy wyższych napięciach czas ten będzie odpowiednio krótszy.
Jeśli przewidywane impulsy wyzwalające miałyby być krótsze, zastosuj na wejściu równie prosty układ wydłużania impulsu. W zależności od potrzeb możesz jeszcze dodać na wejściu obwód różniczkujący RC.
Przykładowe rozwiązania pokazane są na rysunku 5.
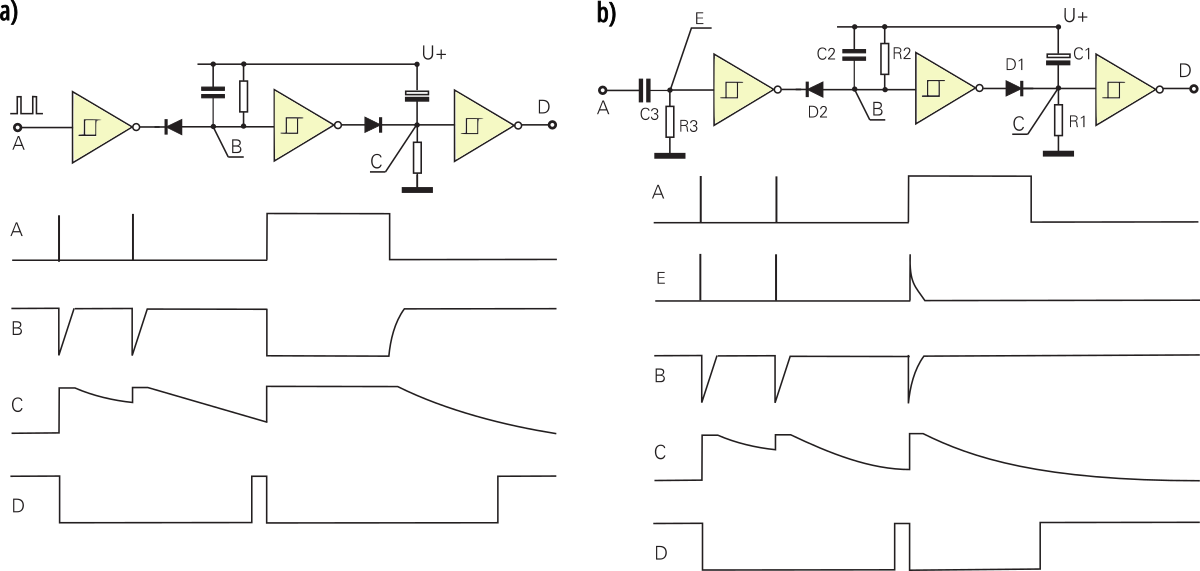
Rysunek 5
Na rysunku 5a znajdziesz układ, który daje na wyjściu stan niski, jeśli na wejściu pojawiają się nawet krótkie impulsy dodatnie. Zauważ, że stan aktywny na wyjściu (niski) będzie też panował cały czas podczas trwania stanu dodatniego na wejściu i jeszcze przez czas opóźnienia, wyznaczony głównie przez ostatni obwód RC (z kondensatorem elektrolitycznym).
Nieco inaczej działa układ z rysunku 5b. Tu dodatkowo zastosowałem na wejściu obwód różniczkujący C3R3. Jeśli na wejściu A będą regularnie pojawiać się impulsy (albo przebieg prostokątny), to wyjście układu, czyli punkt D, będzie stale w stanie niskim. Jeśli przebieg na wejściu zaniknie, na wyjściu pojawi się stan wysoki. Masz oto dyskryminator częstotliwości – jeśli częstotliwość przebiegu podawanego na wejście będzie odpowiednio duża – na wyjściu D będzie się utrzymywał stan niski; jeśli częstotliwość będzie zbyt mała – na wyjściu pojawią się impulsy dodatnie.
Na zakończenie kolekcji układów czasowych jeszcze spójrz na układy z rysunku 6.
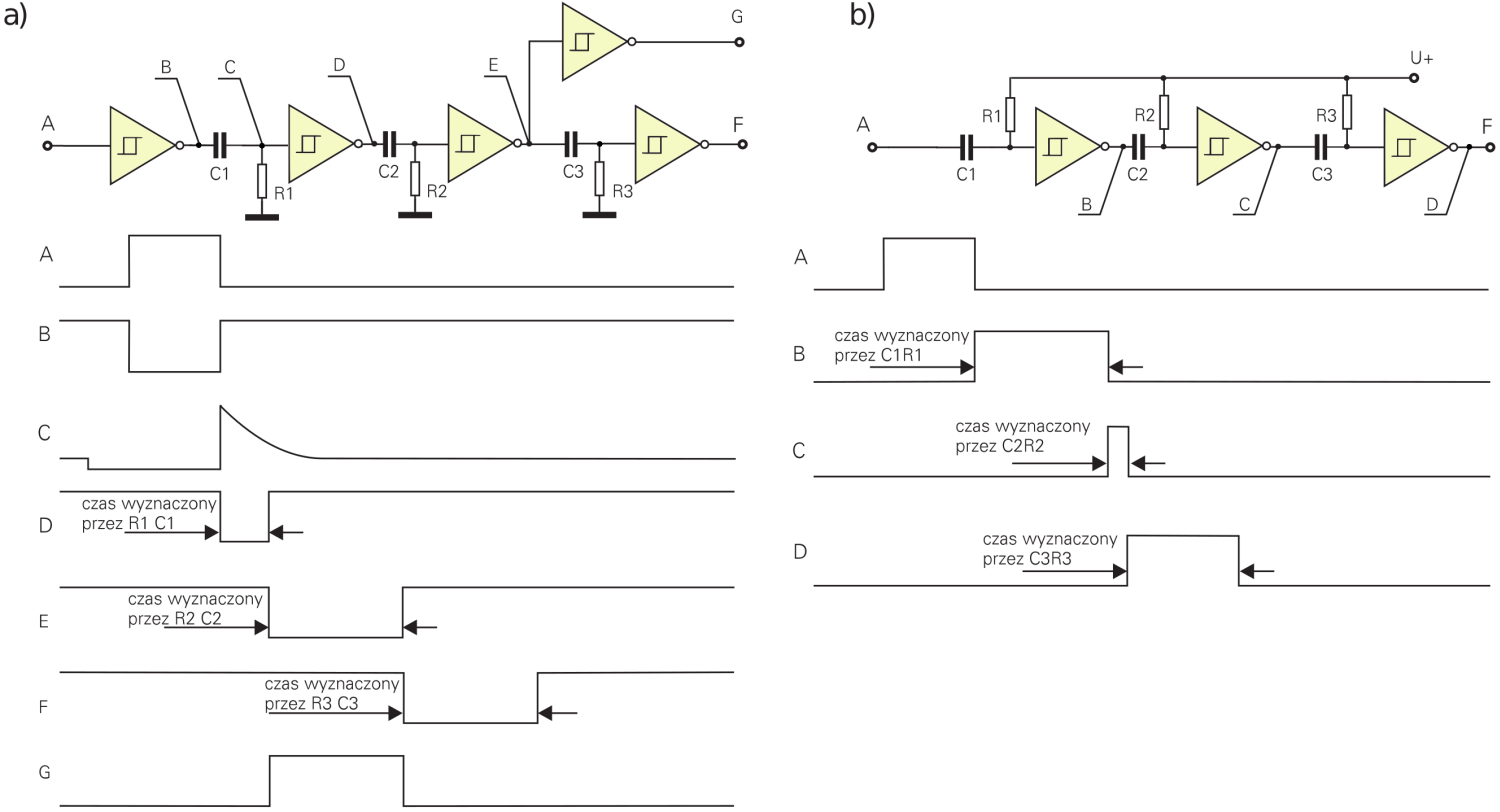
Rysunek 6
Zauważ, w jaki beznadziejnie prosty sposób z użyciem kilku inwerterów „ze szmitem” możesz uzyskać efekt biegnącego zera lub biegnącej jedynki. Bardzo często taki sposób jest tańszy i lepszy niż wykorzystanie rejestru przesuwnego albo licznika z dekoderem. Dodatkową zaletą jest fakt, że poszczególne czasy mogą być dobierane w bardzo szerokich granicach, niezależnie jeden od drugiego (pokazałem ci to na rysunku). Przy dobieraniu czasów nie możesz jednak przesadzić. Przy drugim, nieaktywnym zboczu kondensator musi się zdążyć rozładować. Dlatego jeśli któryś z czasów byłby wyjątkowo krótki, powinieneś zastosować diodę równolegle do rezystora, jak na rysunku 3c.
Podany sposób opóźnienia można zastosować choćby w prostych układach sterujących wyświetlaczem licznika−częstościomierza. Przykładowo w układzie z rysunku 6a impuls wejściowy swym stanem wysokim umożliwia pracę licznika. Po krótkim czasie opóźnienia (R1C1) dodatni impuls z wyjścia G wpisuje zawartość licznika do pamięci (zatrzasku, latcha), a ujemny impuls z następnego wyjścia F zeruje licznik przygotowując go do następnego cyklu pracy.
Piotr Górecki