PKE – Praktyczny Kurs Elektroniki (19) Inteligentna bariera świetlna
Działanie bariery świetlnej polega na tym, że jej przecięcie, czyli zasłonięcie odbiornika, wywołuje alarm. W najprostszym przypadku bariera mogłaby składać się z żarówki, fotorezystora i jednego tranzystora według rysunku A, ale jej przydatność byłaby wątpliwa, ponieważ reagowałaby na wszelkie oświetlenia tła.
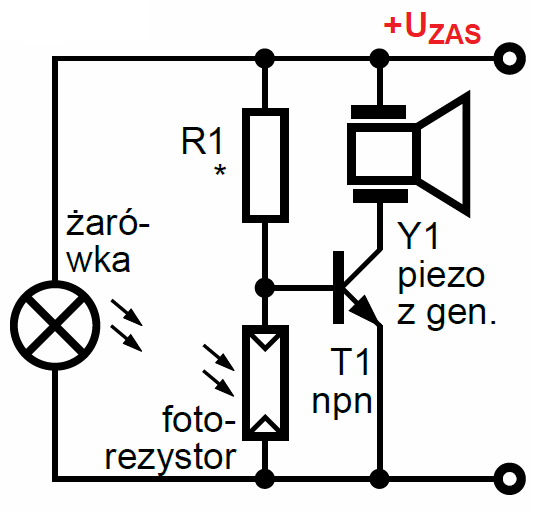
Rysunek A
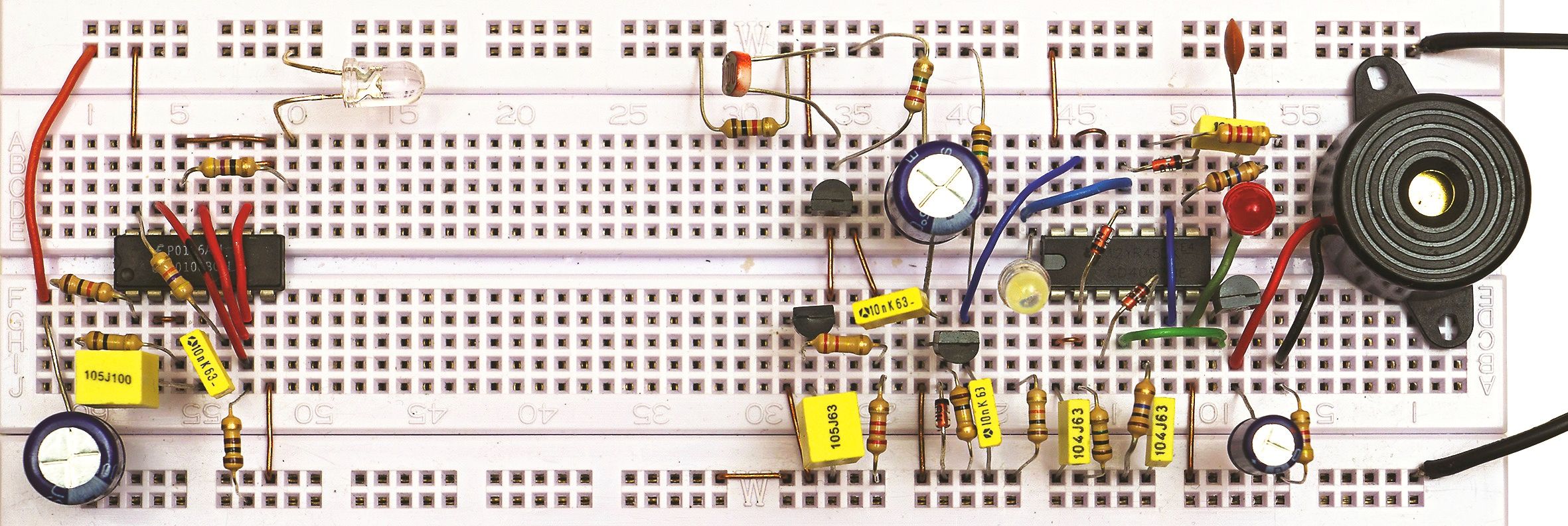
W naszej inteligentnej barierze pokazanej na fotografii tytułowej, mamy nadajnik krótkich impulsów świetlnych oraz odbiornik, który reaguje tylko na takie krótkie impulsy świetlne, a zmiany oświetlenia tła mają niewielki wpływ działanie układu. Wzmocnione impulsy świetlne są przetwarzane. Biała dioda LED jest kontrolką, potwierdzającą prawidłową pracę odbiornika. Układ reaguje, gdy odbiornik nie odbierze kilku impulsów. Dodatkowe obwody zwiększają odporność na „oszukiwanie”. Jeżeli układ stwierdzi, że częstotliwość impulsów jest albo za mała albo za duża, wtedy też włącza się alarm.
Schemat inteligentnej bariery świetlnej pokazany jest na rysunku B.
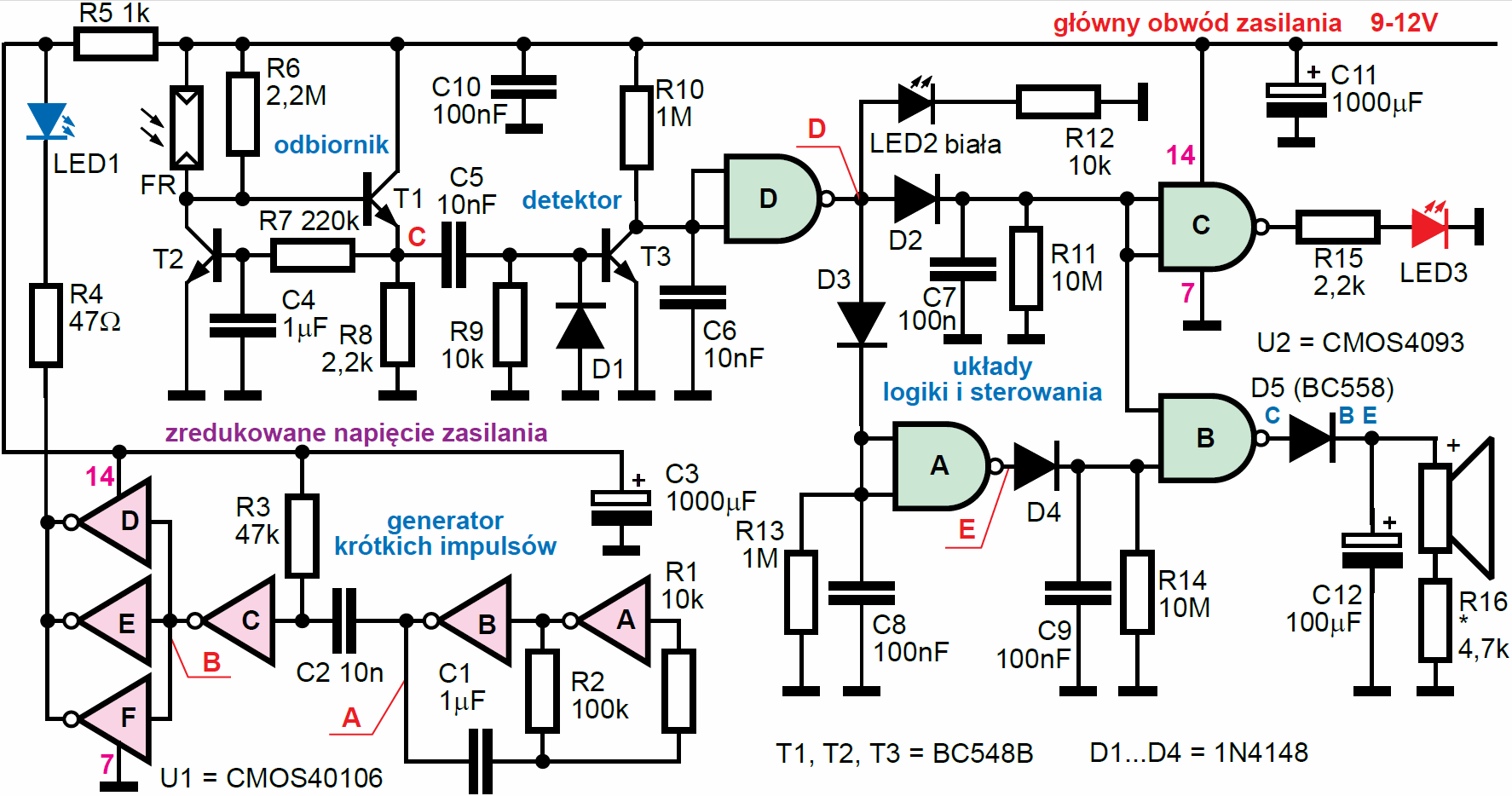
Rysunek B
Zwróć uwagę, że nóżka 14, czyli plus zasilania kostki U2 4093, jest dołączona do głównego obwodu zasilania, natomiast nóżka 14 kostki U1 40106 dołączona jest do obwodu zredukowanego zasilania, za rezystorem ograniczającym R5.
Ponieważ w zestawie mamy tylko cztery diody, więc w roli D5 pracuje złącze kolektor-baza tranzystora (w moim modelu jest to BC558, gdzie baza i emiter są zwarte).
Bariera świetlna to przestrzeń miedzy niebieską diodą LED1 a fotorezystorem FR. Gdy zbudujesz model podobny do tego z fotografii tytułowej, wygnij wyprowadzenia niebieskiej LED1 i fotorezystora FR, żeby były naprzeciw siebie. Jednoczesne migotanie niebieskiej LED1 i białej LED2 wskazuje, że odbiornik pracuje prawidłowo. Brzęczyk Y1 powinien milczeć, a czerwona dioda LED3 być wygaszona.
Gdy przerwiesz barierę (zasłonisz fotorezystor), zaświeci LED3 i odezwie się brzęczyk Y1. Dzięki elementom D5, C12 dźwięk brzęczyka jest przedłużony.
Zwróć uwagę, na jak długo trzeba przerwać barierę, żeby alarm zadziałał – ten czas wyznaczony jest przez elementy C7 i R11. Możesz trochę skrócić ten czas, zmniejszając R11 do 4,7 MΩ, ale dalsze zmniejszanie uniemożliwi pracę. Możesz też wydłużyć ten czas, dołączając równolegle do C7 jeden lub dwa kondensatory 100 nF.
Układ reaguje tylko na impulsy z pewnego zakresu częstotliwości. Przekonaj się, że zwiększenie częstotliwości pracy wywoła alarm – w tym celu zmniejsz wartość rezystora R2 z 100 kΩ do 10 kΩ. Częstotliwość zwiększy się ok. 10-krotnie, co pokażą diody LED1 i LED2. Odezwie się też brzęczyk alarmowy Y1.
Podobnie będzie gdy zmniejszysz częstotliwość, stosując R2 = 1 MΩ. Wtedy oprócz dźwięku brzęczyka, zaświeci się czerwona lampka LED3.
Bariera w moim modelu, zmontowana na płytce stykowej, ma tylko kilka centymetrów długości. Jednak z uwagi na impulsowe sterowanie niebieskiej diody LED1 znacznym prądem, odległość LED1 – fotorezystor może wynosić ponad 10cm. Jest to dobry wynik, biorąc pod uwagę średni prąd diody LED1 poniżej 1 mA. W praktycznych barierach świetlnych stosuje się podobnie pracujące, nawet z prądem ponad 1 A w impulsie, diody podczerwone (IRED) o wąskim kącie świecenia lub z soczewkami oraz czułe fotoelementy odbiorcze, a uzyskiwany zasięg wynosi nawet ponad 100 metrów.
Opis układu dla „zaawansowanych”
Klasyczny dwubramkowy generator (U1A, U1B) wytwarza przebieg prostokątny o okresie około 280 ms (0,28 s), czyli częstotliwości około 3,5 Hz. Obwód różniczkujący C2 R3 powoduje, że impulsy sterujące niebieską diodą LED są bardzo wąskie – trwają tylko około 600 mikrosekund, czyli 0,6 ms. Mała wartość rezystora R4 (47 Ω) powoduje, prąd diody jest duży, sięga 50 mA, ale dzięki znikomemu wypełnieniu impulsów, całkowity pobór prądu nadajnika jest zaskakująco mały, około 0,4 mA.
Impulsy są odbierane przez fotorezystor FR. Tranzystor T1 jest wtórnikiem. Na jego emiterze, w punkcie C, występują odebrane impulsy świetlne. Natomiast tranzystor T2 jest źródłem prądowym, współpracującym z fotorezystorem. Występuje tu silne ujemne sprzężenie zwrotne, ale wskutek obecności obwodu R7 C4 tylko dla sygnałów stałych i wolnozmiennych – dlatego dla takich sygnałów czułość jest bardzo mała. Natomiast dla szybkich przebiegów impulsowych czułość jest dużo większa. Dodatnie impulsy z punktu C, o czasie trwania około 0,6 ms są podawane przez obwód różniczkujący C5 R9 na bazę tranzystora T3 i na jego kolektorze otrzymujemy impulsy ujemne. Dodanie kondensatora „pamiętającego” C6 powoduje, że impulsy są wydłużane i ich czas trwania jest wyznaczony przez R10 C6. W punkcie D uzyskujemy dodatnie impulsy o czasie trwania prawie 10 ms (i okresie powtarzania około 280 ms). Na rysunku C pokazane są zrzuty z ekranu oscyloskopu przebiegów z punktów A…D (zwróć uwagę na różną skalę czasu).
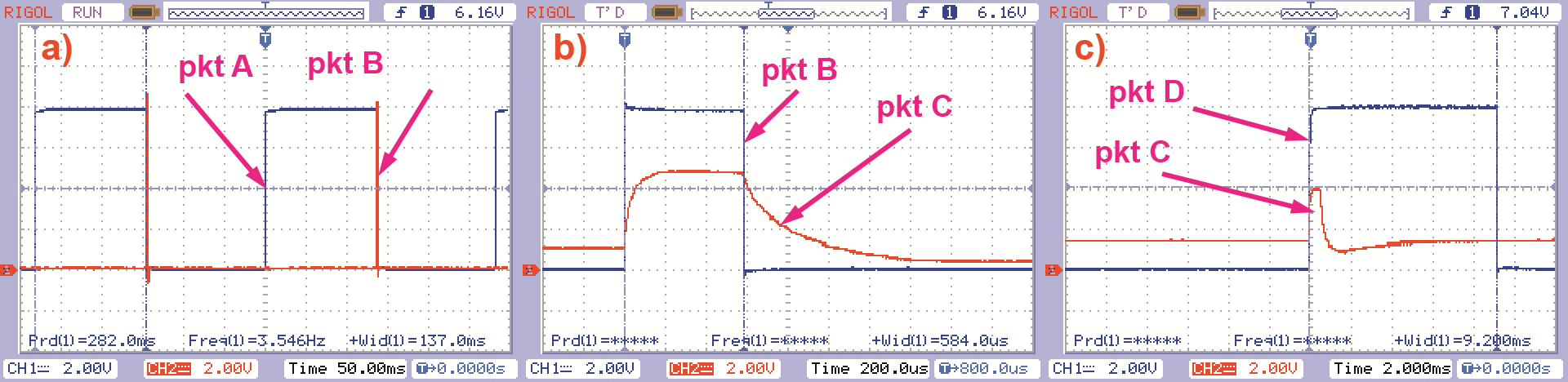
Rysunek C
Dodatnie impulsy z punktu D przez diody D2, D3 ładują kondensatory C7 i C8, oba o pojemności 100 nF. Ładowanie trwa niecałe 10 ms, a rozładowanie około 280 ms. Ponieważ kondensator C7 rozładowuje się przez dużą rezystancję R11 (10 MΩ), napięcie na nim spadnie niewiele. Podczas normalnej pracy bariery, napięcie na C7 jest na tyle wysokie, że bramki U2B i U2C traktują je jako stan logiczny wysoki. Dioda LED3 jest wygaszona. Gdy bariera na chwilę zostanie przerwana i „zgubi” jeden impuls, napięcie na C7 spadnie, ale bramki U2B, U2C nie zmienią stanu. Jeżeli jednak zabraknie kilku impulsów, wtedy napięcie na C7 spadnie znacznie, bramki zmienią stan. Zaświeci czerwona dioda LED3 i odezwie się brzęczyk Y.
Dioda LED3 zaświeca się przy braku impulsów oraz gdy ich częstotliwość jest za mała. Natomiast bramka U2A pracuje w obwodzie detektora zbyt dużej częstotliwości impulsów (gdyby ktoś chciał „oszukać” barierę impulsami o zbyt dużej częstotliwości). Podczas normalnej pracy bariery każdy odebrany impuls powoduje naładowanie kondensatora C8, ale z uwagi na wartość współpracującego rezystora R13 (1 MΩ) napięcie na C8 zmniejszy się do poziomu logicznego niskiego. Dlatego po każdym odebranym impulsie, w punkcie E pojawia się stan niski, ale tylko na około 100 ms, co wyznacza stała czasowa R13 C8 (1 MΩ×100 nF=100 ms). Potem, przez około 180 ms w punkcie E panuje stan wysoki i kondensator C9 ładuje się przez diodę D4. Ilustruje to rysunek D. A więc C9 rozładowuje się pomału przez R14 przez czas około 100 ms (wyznaczony przez R13 C8). Podczas normalnej pracy, gdy impulsy pojawiają cię co 280 ms, czyli z częstotliwością ok 3,5 Hz, na C9 panuje stan wysoki, a na wyjściu bramki U2B utrzymuje się stan niski i brzęczyk nie działa.
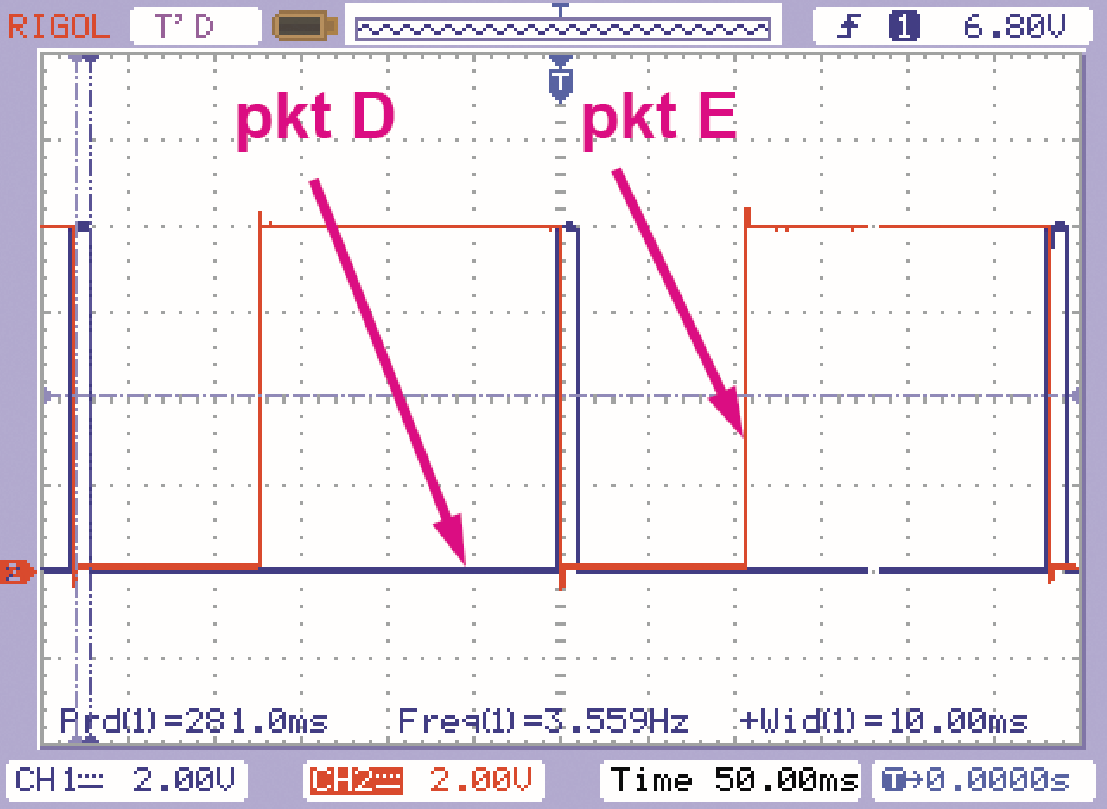
Rysunek D
Gdyby jednak częstotliwość odbieranych impulsów była zbyt duża, większa od 10 Hz, czyli ich czas powtarzania krótszy niż 100 ms, to napięcie na C8 nie zdąży opaść do poziomu logicznego niskiego. Na wyjściu bramki U2A cały czas będzie panował stan niski, nie będzie ładowany C9, co zostanie potraktowane jako stan niski i na wyjściu bramki U2B wystąpi stan wysoki. Odezwie się brzęczyk.
Dźwięk brzęczyka zawsze oznacza alarm. Gdy jednocześnie świeci LED3, to nastąpiła przerwa w odbiorze impulsów lub ich częstotliwość jest za mała. Gdy pracuje brzęczyk Y1, a dioda LED nie świeci, częstotliwość impulsów jest za duża.
Poznajemy elementy i układy elektroniczne
W poprzednim wykładzie nauczyliśmy się budować generatory przebiegu prostokątnego o różnym współczynniku wypełnienia impulsów. W tym wykładzie poznamy obwody skracające i wydłużające impulsy. Ale najpierw musimy dobrze zbadać pewne bardzo ważne zagadnienia.
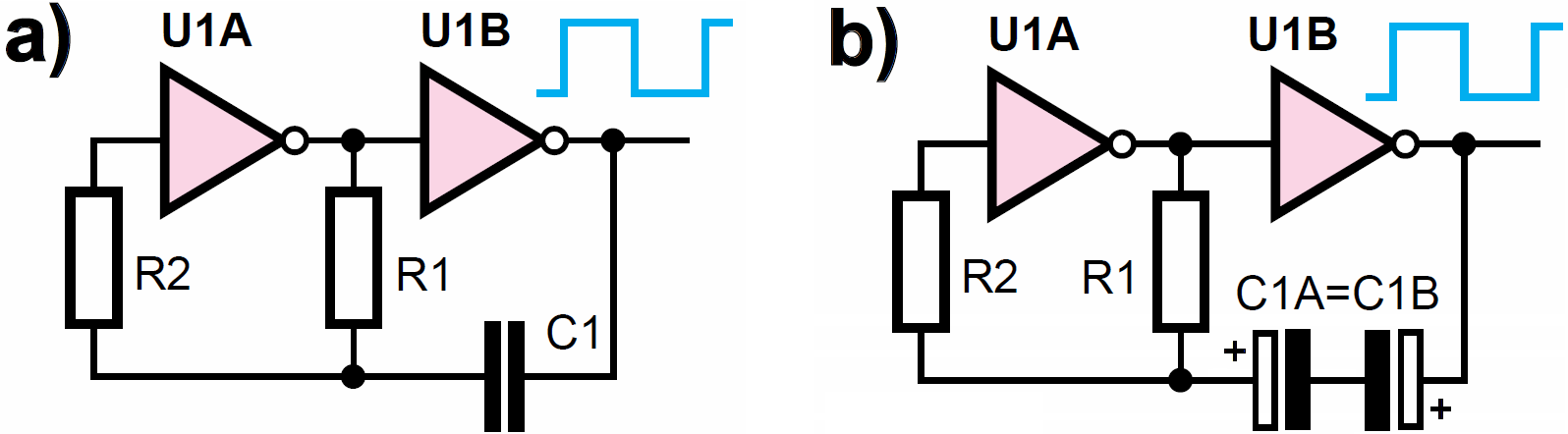
W poprzednim wykładzie poznaliśmy tak zwany generator dwubramkowy według rysunku 1a. Wiadomo, że z dwóch stron inwertera U1B zawsze występują przeciwne stany logiczne. Przez to kondensator C1 jest na przemian ładowany przez rezystor R1 w jednym kierunku, rozładowywany, ładowany w przeciwnym kierunku, rozładowywany, i tak dalej. Dlatego musi to być kondensator niebiegunowy, w praktyce stały, foliowy, a nie zwykły pojedynczy „elektrolit”. Jeżeli chcielibyśmy wykorzystać „elektrolity”, musielibyśmy połączyć dwa jednakowe szeregowo przeciwsobnie według rysunku 1b, ale wtedy oczywiście stabilność częstotliwości będzie słaba.
Rysunek 1
Przypomnijmy teraz, że przetwornice pojemnościowe można w bardzo prosty sposób zrealizować za pomocą układów cyfrowych. Ja wykorzystałem generator dwubramkowy do realizacji prostego potrajacza napięcia według rysunku 2 i fotografii 3, by przy okazji omówić bardzo ważne zagadnienie, dotyczące wszystkich układów cyfrowych CMOS.
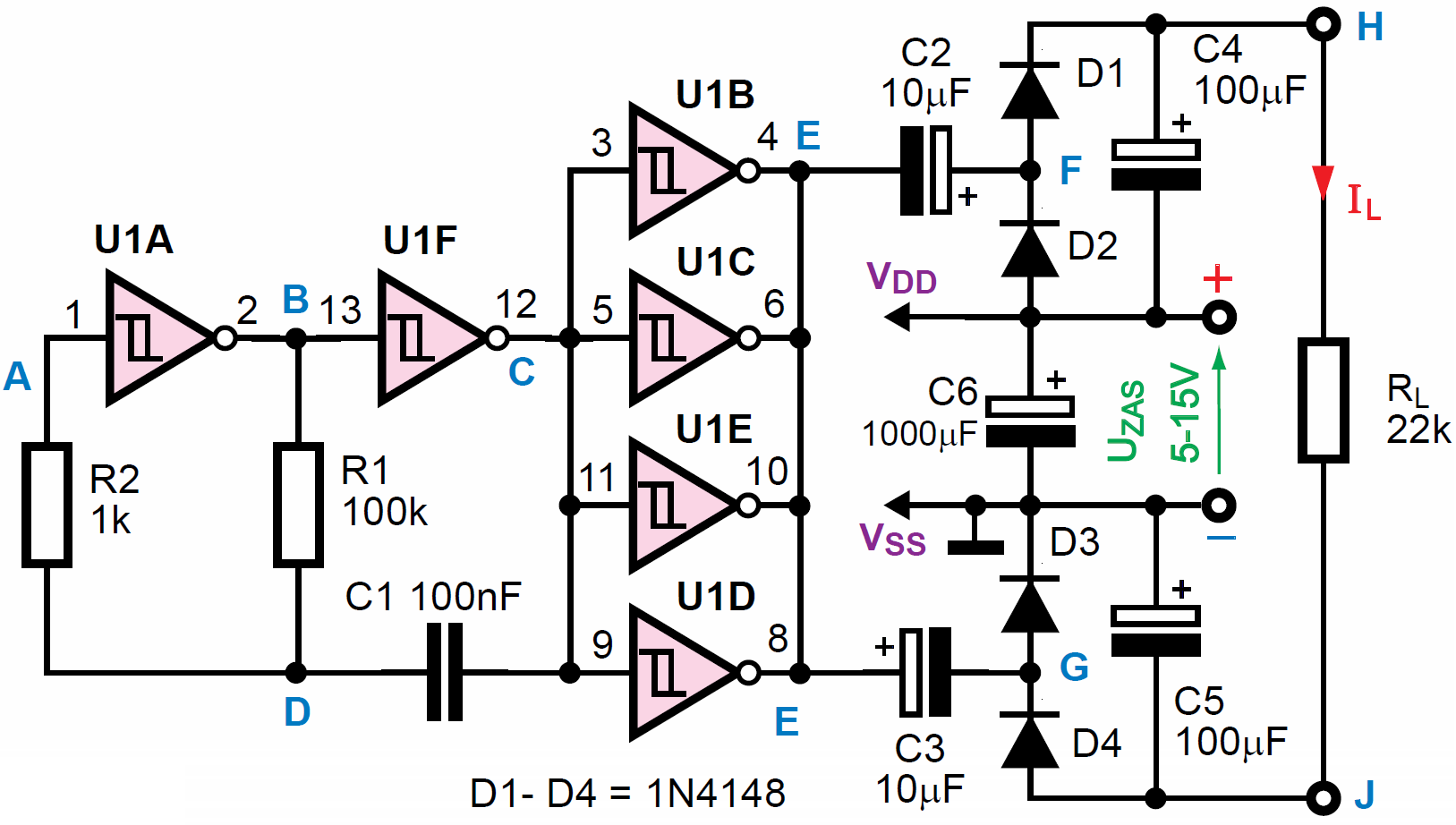
Rysunek 2
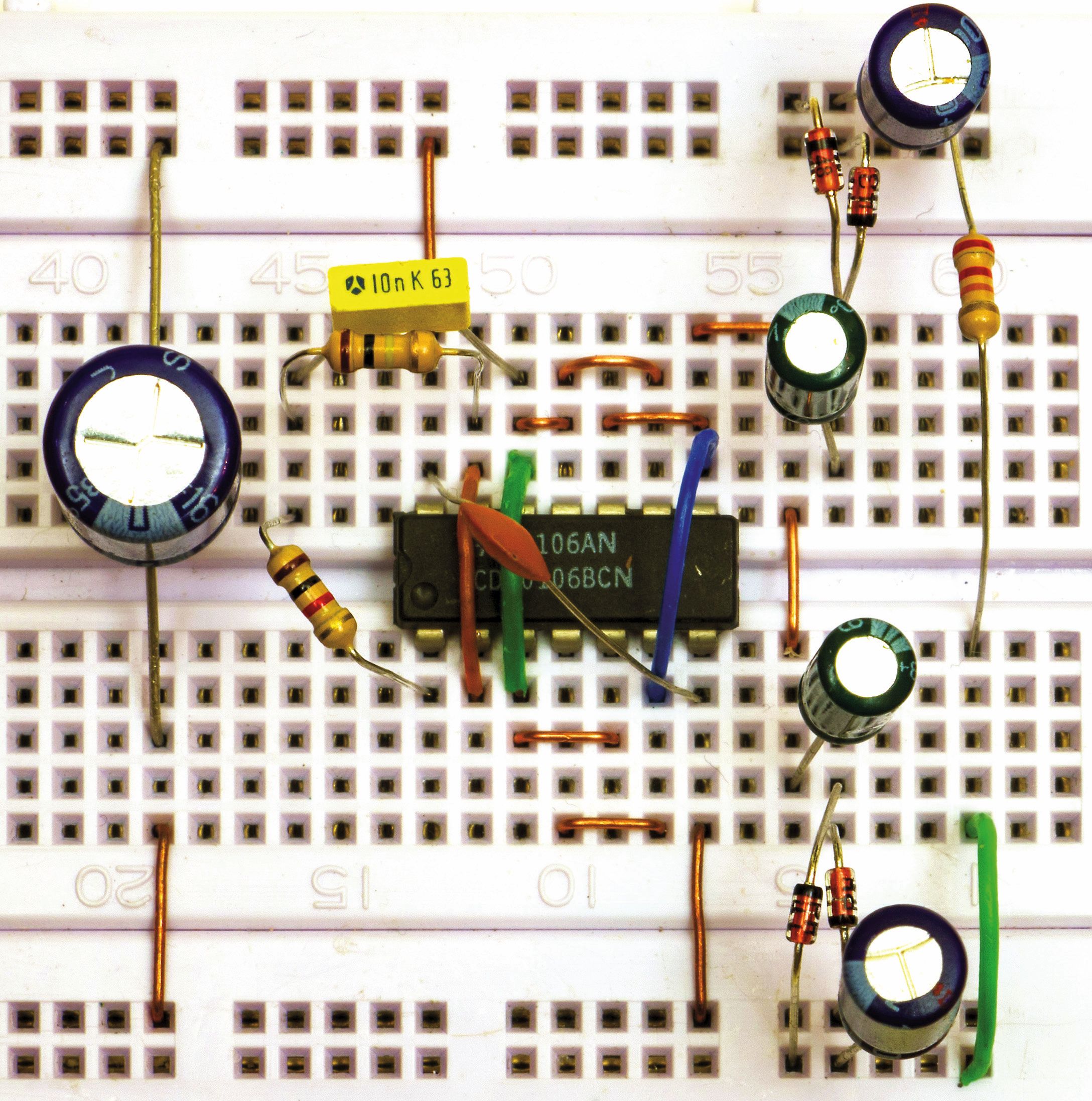
Fotografia 3
Zasadę działania przetwornicy znasz z wykładu 6. Dołączając naładowany kondensator do wyjścia generatora możemy go „wypchnąć” poza napięcie zasilania. Nasz potrajacz wykorzystuje cykliczne ładowanie i rozładowywanie kondensatorów C2, C3. Przykładowo gdy w punkcie E występuje stan niski (masa), wtedy kondensator C2 jest ładowany. Prąd płynie od dodatniej szyny zasilania (VDD), przez diodę D2, C2 i wyjścia bramek do masy (VSS). Gdy potem w punkcie E pojawi się stan wysoki (plus zasilania), naładowany kondensator C2 zostanie „podrzucony do góry” i przez diodę D1 podładuje C4. W punkcie H otrzymamy napięcie wyższe od potencjału dodatniej szyny zasilania o wartość napięcia baterii (minus spadki napięć na diodach D1, D2 i na rezystancji wyjściowej bramek). Analogicznie w punkcie J otrzymamy napięcie ujemne względem masy. W moim modelu zasilanym napięciem 9,3 V, napięcie na obciążeniu RL = 22 kΩ wynosiło 24,0 V, czyli prąd IL wynosił około 1,1 mA. Bez obciążenia RL napięcie między punktami H, J wynosiło 25,9 V. Nie jest to nic nowego – przetwornice pojemnościowe realizowaliśmy już w wykładzie 6 (rysunki 2…4), a teraz możemy realizować je dużo prościej. Dla nas ważniejsza jest teraz inna kwestia:
Ale czy w układzie generatora dwubramkowego kondensator C1 nie jest „wyrzucany” poza napięcia zasilania?
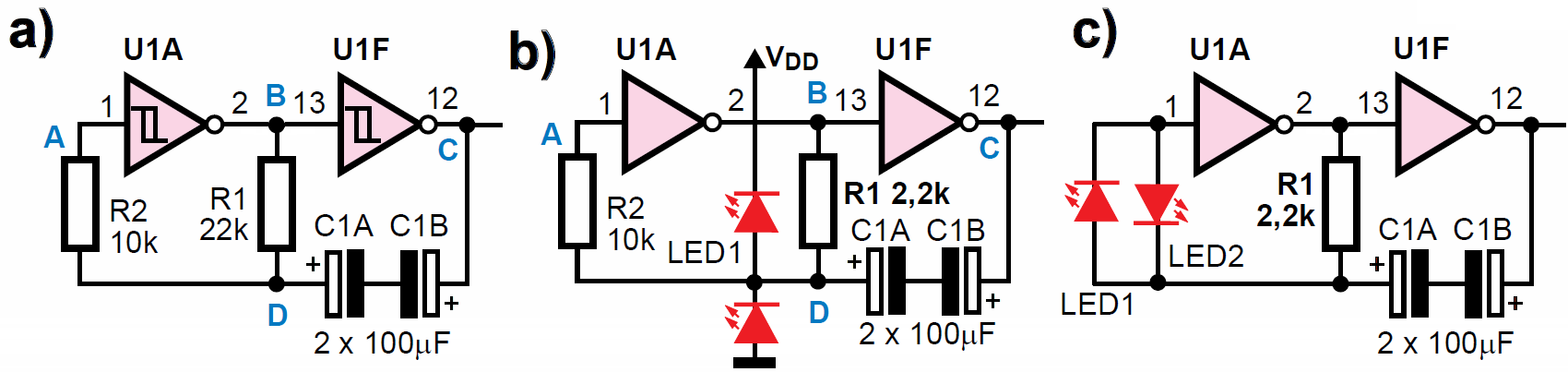
Otóż jak najbardziej jest! Możesz się także o tym przekonać bez oscyloskopu. Zbuduj lub zmodyfikuj generator według rysunku 4a.
Rysunek 4
Rysunek 5
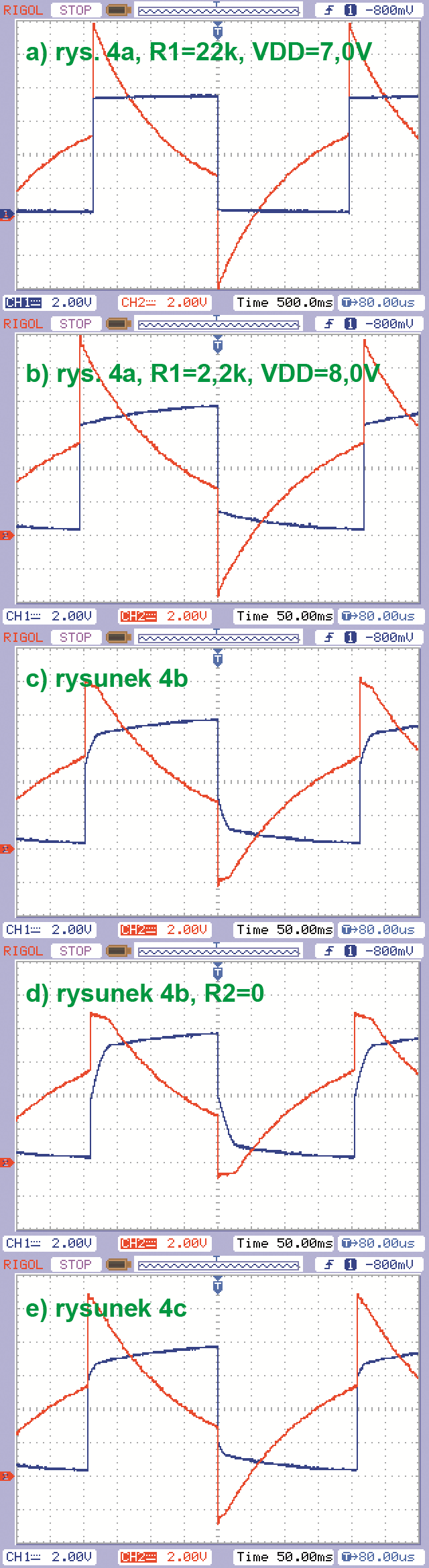
Obwody powielaczy możesz zdemontować, a inwertery U1B, U1C, U1D, U1E pozostaw bez zmian. Zwiększamy pojemność C1, stosując dwa „elektrolity” 100 uF, zmniejszamy R1 do 22 kΩ. Zaraz zbadamy kwestię „wyrzucania, a na razie popatrz na rysunek 5a, który pokazuje przebiegi w punktach C (przebieg niebieski), D (przebieg czerwony) przy zasilaniu układu napięciem 7,0 V. By prądy pracy były większe, zmniejszamy jeszcze wartość R1 do 2,2 kΩ. Przebiegi w punktach C, D przy zasilaniu napięciem 8,0 V pokazane są na rysunku 5b. Zakrzywienie „grzbietów” przebiegu prostokątnego wynika z przepływu znacznego prądu ładowania i rozładowania pojemności C1 – na wewnętrznej rezystancji wyjścia bramki U1F występuje spadek napięcia. Przy okazji na rysunku 5b widzisz, że zmieszanie rezystancji R1 nie jest korzystne – nie tylko zwiększa pobór prądu, ale też deformuje przebieg prostokątny. Nadmierne zmniejszenie R1 uniemożliwiłoby prawidłową pracę generatora.
A teraz kwestia jeszcze ważniejsza: gdy do punktu D dołączysz „wstecznie” dwie czerwone diody LED1, LED2 według rysunku 4b, będą się one na przemian błyskać, a przebiegi w punktach C, D będą wyglądać jak na rysunku 5c. To akurat specjalnie nie dziwi – potwierdza tylko, że kondensator C jest „wyrzucany” poza napięcie zasilania, jak to było w przetwornicy. Dodatkowe zdeformowanie przebiegów wynika z przepływu prądu przez diody LED. Ale gdy R2 zastąpimy zworą (R2 = 0), wtedy czerwone diody LED zgasną, a przebiegi w punktach C oraz B, D będą wyglądać jak na rysunku 5d – są jeszcze bardziej zdeformowane, co wskazuje na przepływ jeszcze większych prądów.
Dlaczego zwarcie R2 powoduje gaśniecie diod LED? Którędy i dlaczego płyną prądy? Przecież mówiliśmy, że wejścia układów CMOS nie pobierają prądu i że występuje tam tylko niewielka pojemność 5…10 pF?
To ważna sprawa. Aby ją dokładniej zbadać, zamiast rezystora R2 włącz przeciwsobnie równolegle dwie czerwone diody LED według rysunku 4c. Czerwone diody będą na przemian błyskać co dowodzi, że w obwodzie wejściowym bramki U1A płynie znaczący prąd. I wcale nie jest to prąd ładowania i rozładowania znikomej pojemności wejściowej 5…10 pF.
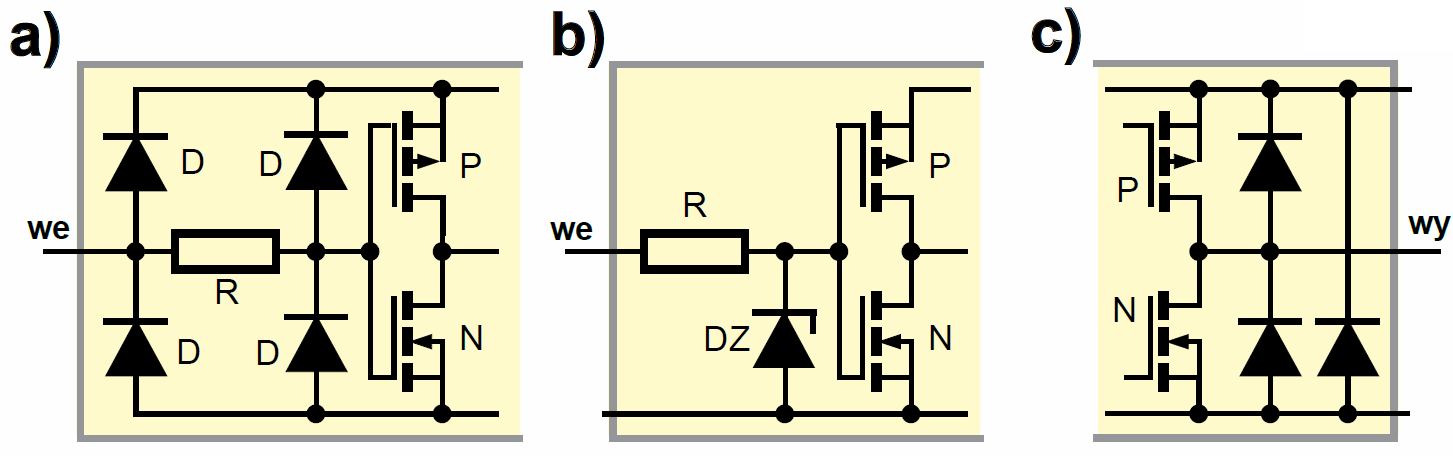
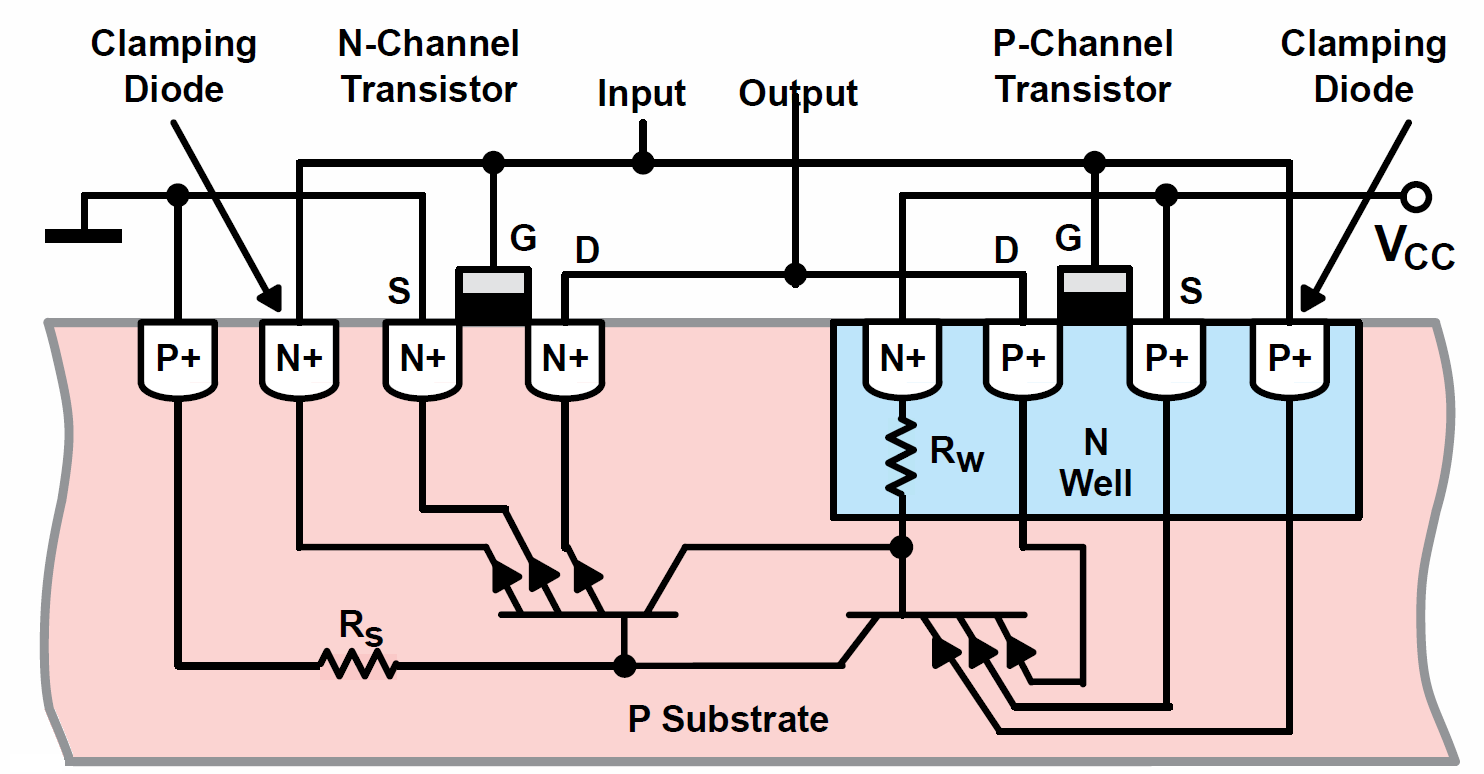
Przyczyną tak dziwnego zachowania wejścia bramki CMOS są niezaznaczane na schematach obwody ochronne wejść. Otóż tranzystory wejściowe MOSFET są bardzo delikatne, a ich obwody bramkowe łatwo uległyby uszkodzeniu pod wpływem ładunków statycznych (powstających np. przy pocieraniu ubrań z tworzyw sztucznym). Aby zapobiec uszkodzeniom, wejścia układów CMOS zawsze mają wbudowane obwody ochronne, zwykle zrealizowane podobnie jak rysunku 6a. Jeżeli napięcie wyjściowe wykroczy ponad napięcie zasilania, prąd popłynie przez „górne” lub „dolne” wejściowe diody ochronne. W niektórych układach, np. we wspomnianych w poprzednim wykładzie „wzmocnionych” inwerterach 4049 i buforach 4050, obwody ochronne zbudowane są inaczej, co w znacznym uproszczeniu pokazuje rysunek 6b. „Ukryte” struktury diodowe są obecne także na wszystkich wyjściach CMOS, co sygnalizuje rysunek 6c.
Rysunek 6
Omówiliśmy właśnie bardzo ważną sprawę. Zapamiętaj raz na zawsze, że na wszystkich wejściach układów CMOS wbudowane są obwody ochronne, zwykle realizowane według rysunku 6a. Nie jest to jedynie ciekawostka.
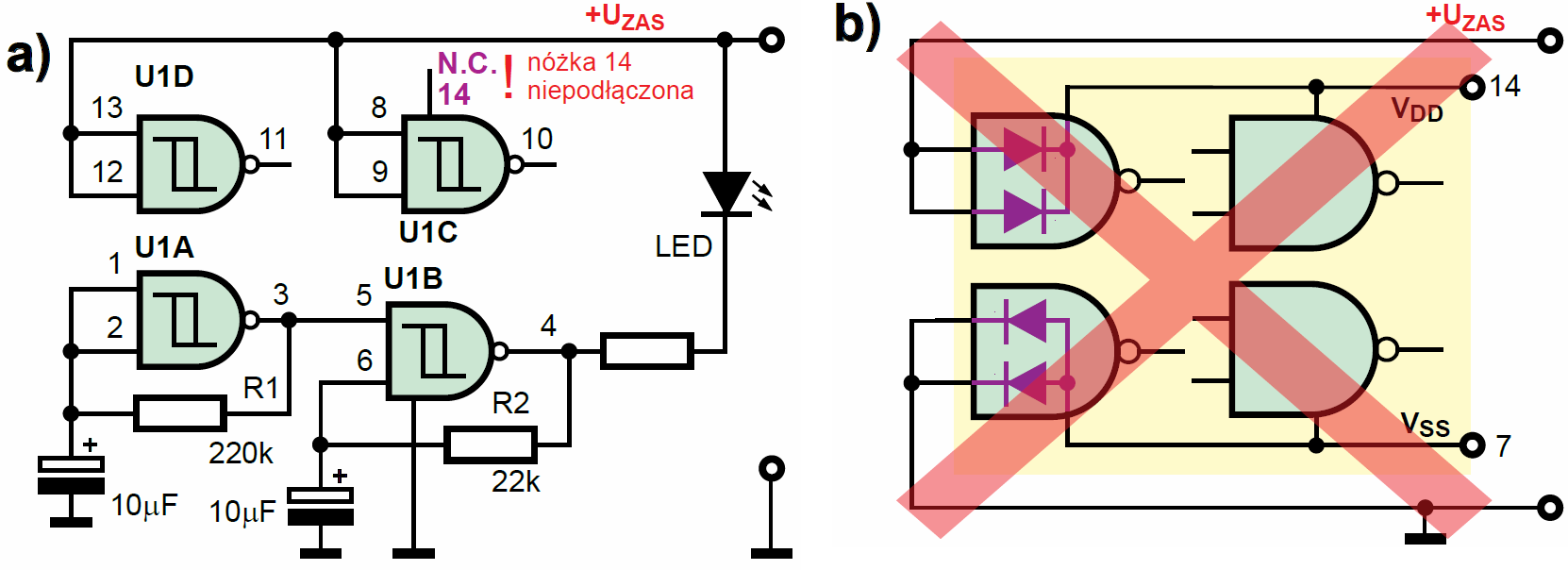
Prawdopodobnie także u Ciebie będzie działał „niezasilany” układ według rysunku 7a i fotografii 8. Podłącz nóżkę 7, ale nie podłączaj nóżki 14 kostki 4093! Generator będzie pracował. Dodatnie napięcie zasilania będzie podane przez omawiane „górne” diody ochronne wejść bramki U1D i U1C (nóżki 8, 9, 12, 13). Na niepodłączonej nóżce 14 będzie obecne napięcie tylko o około 0,7 V niższe od napięcia zasilającego +UZAS, co potwierdza fotografia 8.
Rysunek 7
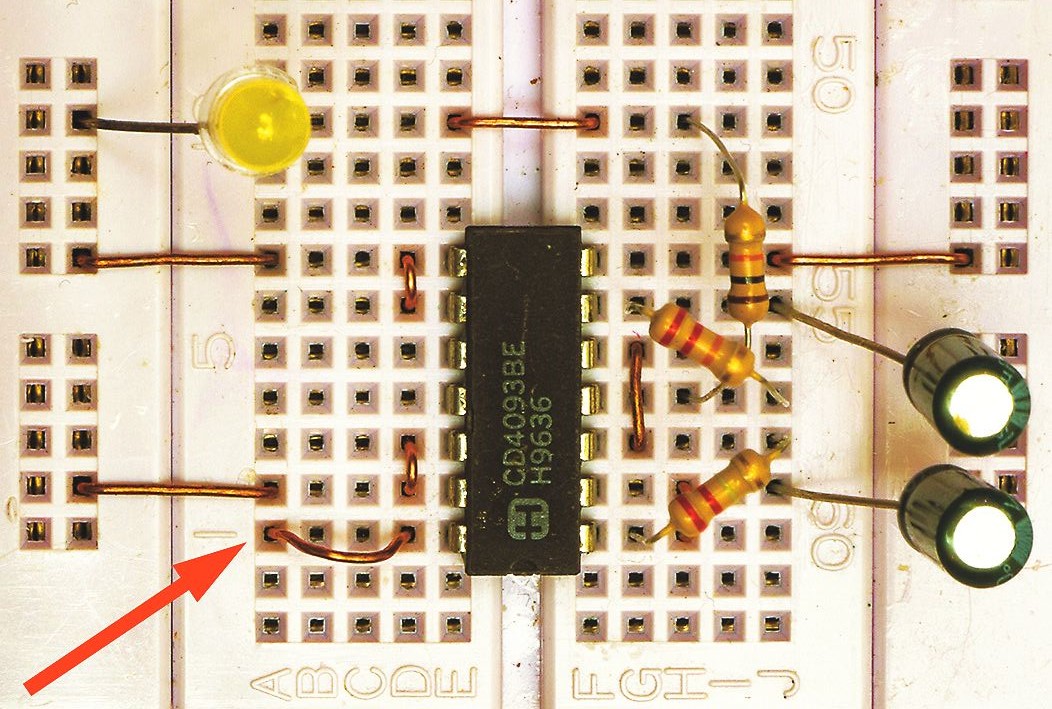
Fotografia 8
Nieprzypadkowo napisałem, że taki układ prawdopodobnie będzie działał. U mnie działał z większością posiadanych kostek 4093 różnych producentów, ale nie ze wszystkimi. Problem w tym, że schematy z rysunku 6 są bardzo uproszczone. W rzeczywistości, z uwagi na specyfikę produkcji, układy scalone CMOS zawierają też dodatkowe pasożytnicze struktury półprzewodnikowe. Oprócz komplementarnych tranzystorów MOSFET, jako „produkt uboczny”, powstają tam między innymi dziwne struktury pnp i npn, które w rzeczywistości są ukrytymi, nieaktywnymi tranzystorami bipolarnymi. Rysunek 9 pokazuje przykład. Poszczególni producenci stosują odmienne rozwiązania, zarówno jeżeli chodzi o obwody ochronne, jak i inne szczegóły budowy. Ponieważ wszystko to jest dużo bardziej skomplikowane, niż pokazuje rysunek 6a, kostki niektórych wytwórców mogą nie pracować w układzie z rysunku 7. Tym bardziej nie będą pracować, gdybyśmy chcieli „sprytnie” zasilić układ CMOS przez jego wejścia z obu stron, także od strony masy.
Rysunek 9
Problem między innymi w tym, że omawiane pasożytnicze tranzystory tworzą struktury tyrystorowe, które podczas normalnej pracy są nieczynne i niegroźne. Jednak jeżeli w obwodzie wejściowym bramki CMOS popłynie prąd, to popłynie on właśnie przez te pasożytnicze struktury tyrystorowe i co ważne, jeśli będzie zbyt duży, to spowoduje ich zadziałanie, a to spowoduje… zwarcie między szynami zasilania wewnątrz układu scalonego! Nawet jeśli nie spowoduje to zwarcia, uniemożliwi prawidłową pracę.
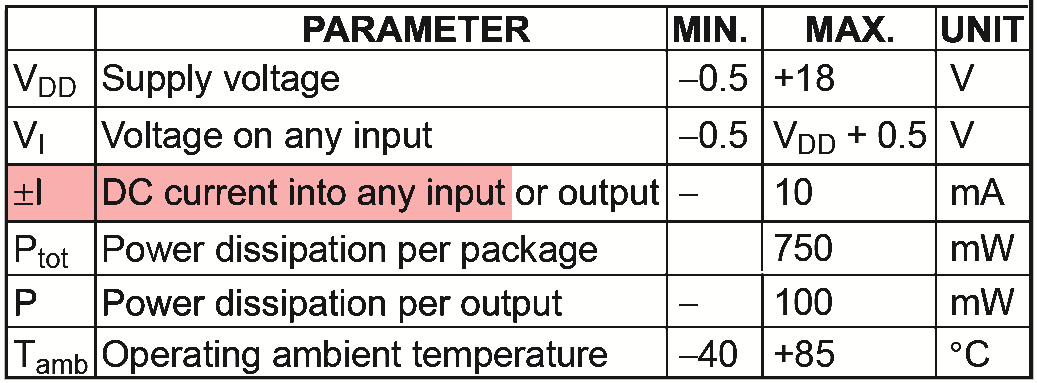
Właśnie z uwagi na obecność pasożytniczych struktur tyrystorowych, w katalogach układów CMOS podaje się maksymalny prąd wejściowy. Rysunek 10 pokazuje fragment karty katalogowej kostek z rodziny CMOS400, gdzie dopuszczalna wartość prądu wejściowego wynosi 10 mA.
Rysunek 10
Podkreślmy, że w normalnych warunkach pracy, w obwodach wejść CMOS płyną tylko maleńkie prądy ładowania i rozładowania pojemności wejściowej podczas zmiany stanów logicznych. Natomiast duże i groźne prądy wejściowe mogą płynąć tylko wtedy, gdy napięcie na wejściach jest albo wyższe od dodatniego napięcia zasilania, albo niższe od ujemnego. Jak już wiemy, problem ten dotyczy klasycznego generatora dwubramkowego, ale nie tylko.
To samo zjawisko występuje w często stosowanych obwodach skracania impulsów, gdzie kluczową rolę pełni tzw. różniczkujący obwód RC. Można powiedzieć, że taki obwód wykrywa dodatnie (narastające) albo ujemne (opadające zbocze sygnału i wytwarza wtedy impuls o czasie trwania w przybliżeniu równy stałej czasowej RC. Rysunek 11 pokazuje przebiegi napięcia w poszczególnych punktach dwóch wersji układu, a czerwone strzałki wskazują chwile, gdy prąd ładowania lub rozładowania kondensatora płynie przez obwody ochronne i napięcie na wejściu wykracza poza napięcie zasilania.
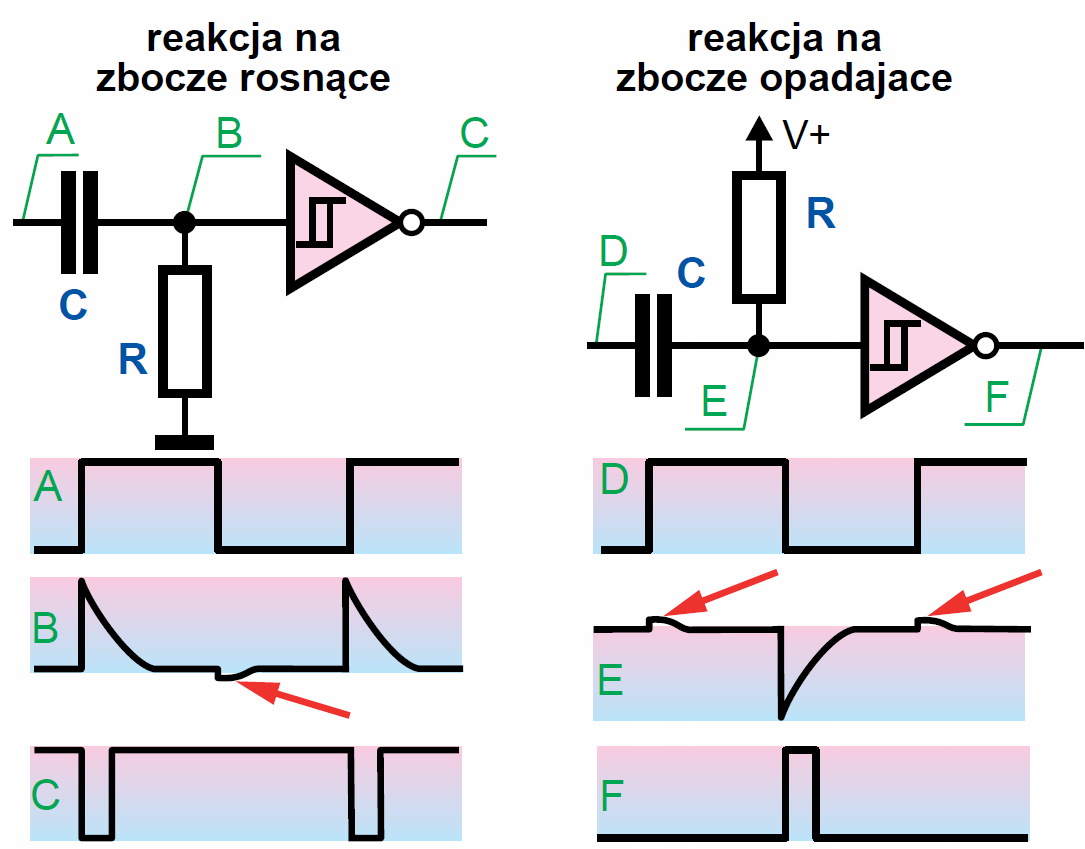
Rysunek 11
Wielkość płynącego prądu zależy od napięcia zasilania. Zagadnienie to omówimy w następnym wykładzie, a na razie wspomnijmy tylko, że czym wyższe napięcie zasilania, tym większa jest wydajność prądowa wyjść. W literaturze można znaleźć informacje, że przy napięciach zasilania ponad 5 V, wyjścia mają na tyle dużą wydajność prądową, że dołączone do nich kondensatory mogą spowodować zadziałanie wspomnianych struktur tyrystorowych. W praktyce okazuje się, że współcześnie produkowane układy mają większa odporność, niemniej przy dużych napięciach zasilania nie zaszkodziłoby dodać szeregowy rezystor ograniczający prąd wejściowy na przykład według rysunku 12.
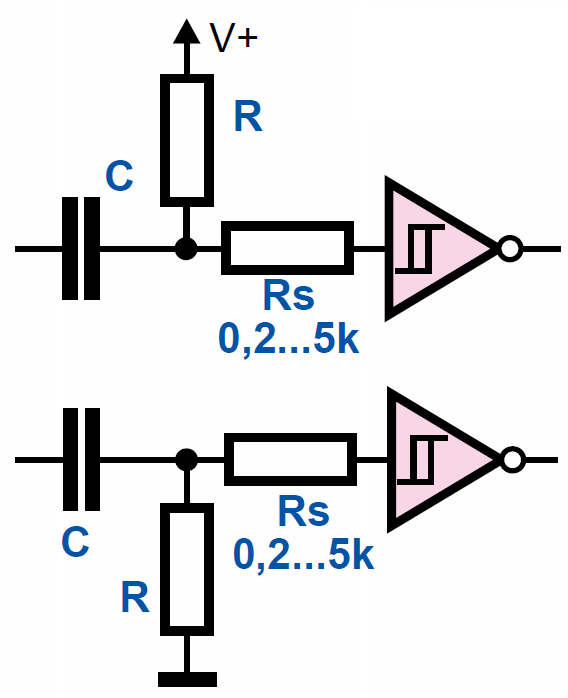
Rysunek 12
Omawianego problemu nie ma w przypadku stosowania tzw. całkujących obwodów RC, gdy kondensator nie jest włączony „w szereg” w torze sygnałowym, tylko gdy jest dołączony do jednej z szyn zasilania. I tak rysunek 13 pokazuje pożyteczny obwód, który opóźnia impulsy o czas T ~ RC i który ignoruje (filtruje) impulsy o czasie trwania krótszym od stałej czasowej RC. Takie same działanie będzie miał obwód, gdzie kondensator zamiast do masy, jest dołączony do dodatniej szyny zasilania.
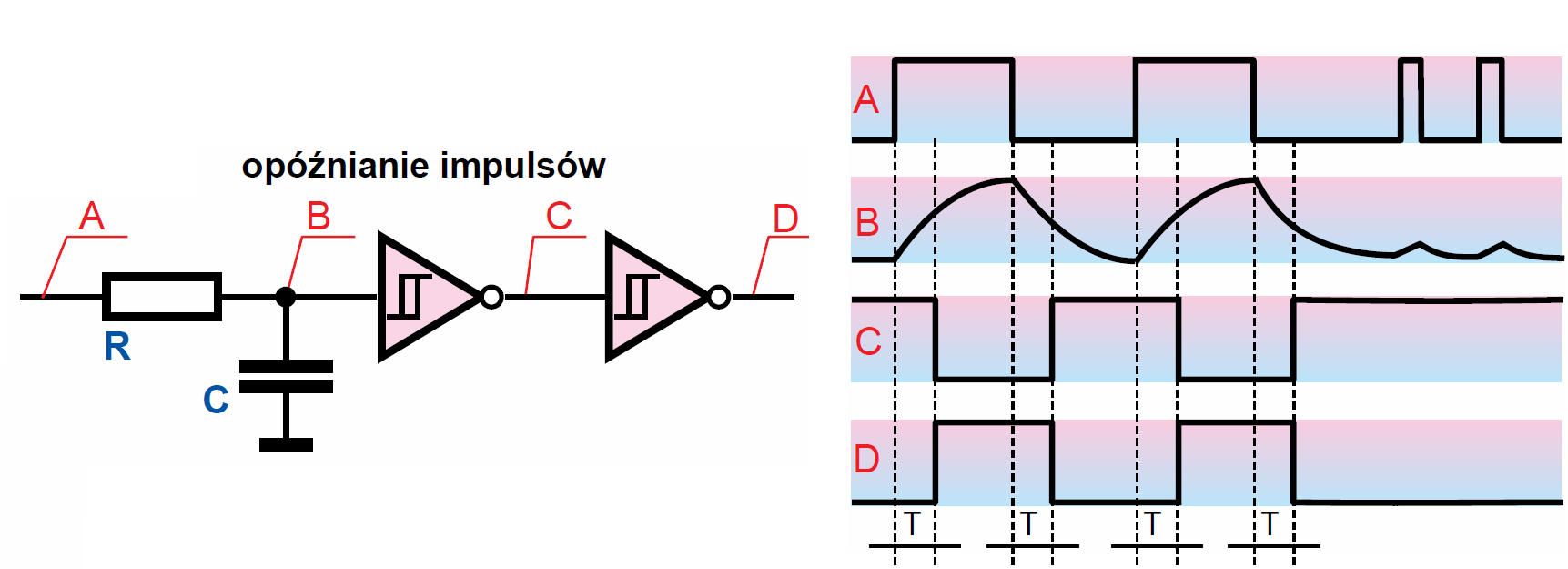
Rysunek 13
Z kolei rysunek 14 pokazuje obwody służące do opóźniania tylko jednego zbocza oraz do niezależnego opóźniania obu zboczy. Na przykład w układzie z rysunku 14a po wystąpieniu ujemnego zbocza, kondensator C pomału rozładowuje się przez rezystancję R, natomiast podczas dodatniego zbocza szybko ładuje się przez diodę i opóźnienie jest wtedy znikome.
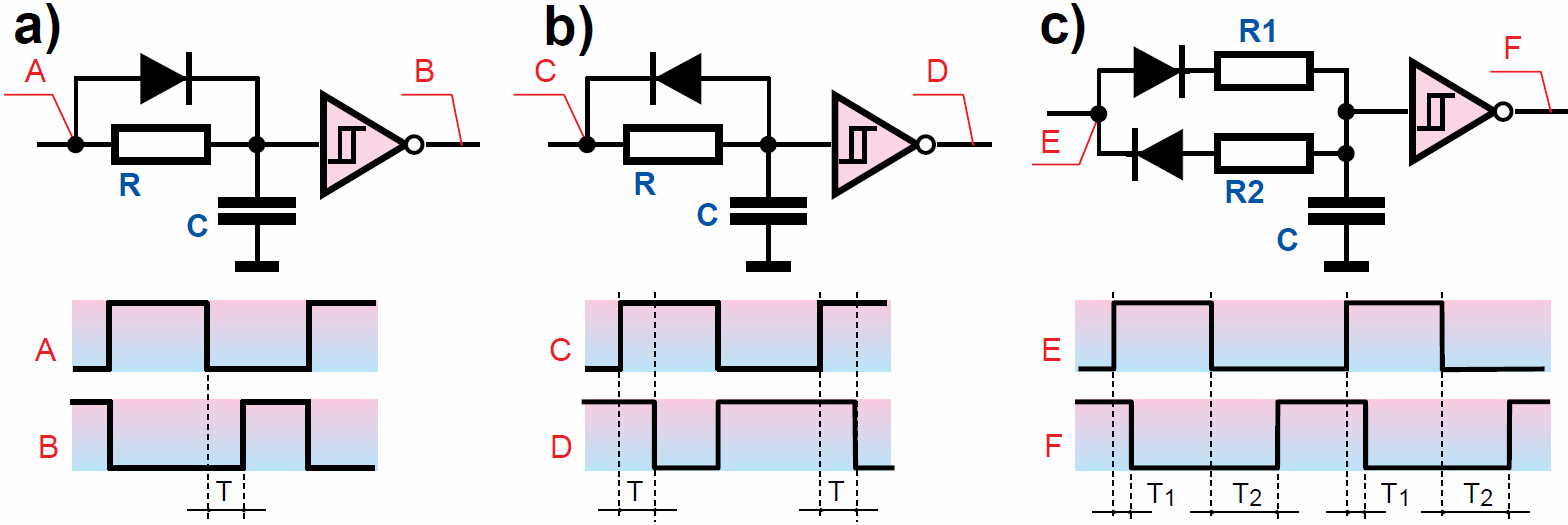
Rysunek 14
Rysunek 15 pokazuje jeszcze inne pożyteczne układy z diodami. Służą one do wydłużania impulsów. W układzie z rysunku 15a nawet krótki impuls dodatni pojawiający się w punkcie A szybko naładuje kondensator C i kondensator ten po zakończeniu impulsu zacznie się pomału rozładowywać, przedłużając impuls wyjściowy i czas około T ~ RC. Stosując kondensatory elektrolityczne można uzyskać długie czasy przedłużania, rzędu nawet kilkudziesięciu sekund. Wtedy prawdopodobnie warto wykorzystać wersje z rysunków c i d, by w spoczynku kondensatory były naładowane (zaformowane i by nie traciły parametrów).
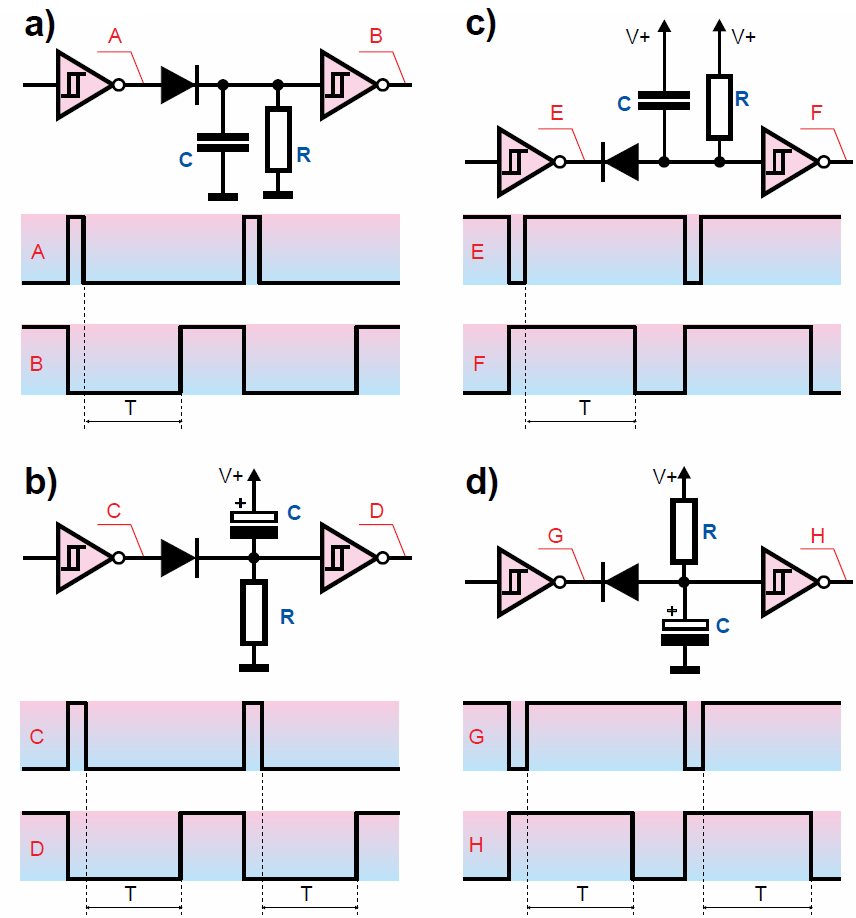
Rysunek 15
W różnych wersjach układów całkujących zwykle można kondensator dołączyć albo do masy, albo do plusa zasilania. Zasadniczo działanie będzie takie same, ale warto zwrócić uwagę, jaka sytuacja wystąpi tuż po włączeniu zasilania. Wtedy wszystkie kondensatory są puste, rozładowane, i wymuszają na współpracujących wejściach stany logiczne takie, jakby kondensatory te stanowiły zwarcie.
Na rysunku 16 znajdziesz klasyczne uniwibratory dwubramkowe z bramkami NOR i NAND.
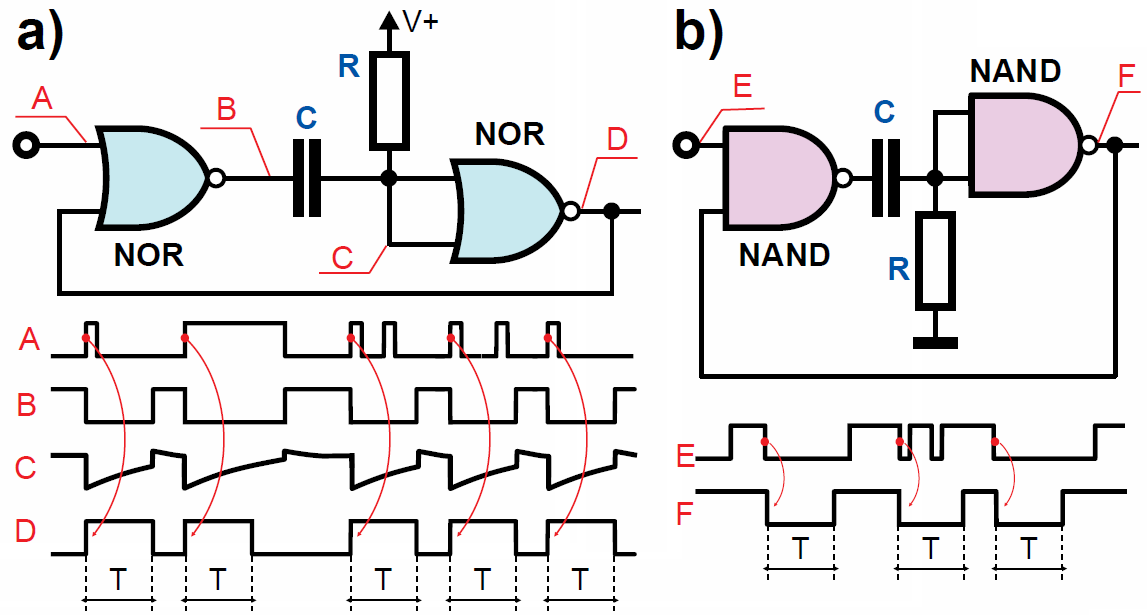
Rysunek 16
A teraz przejdźmy do wydajności prądowej wyjść układów CMOS. W wykładzie 18 na rysunku 6 przyjęliśmy w uproszczeniu, że wyjście bramki ma jakąś rezystancję. W rzeczywistości prąd wyjściowy zależy od napięcia wyjściowego w bardziej złożony sposób i dlatego charakterystyki nie są liniami prostymi. Rysunek 17, pochodzący z materiałów Fairchild Semiconductor pokazuje typowe charakterystyki wyjściowe rodziny CMOS4000 przy napięciach zasilania 5 V, 10 V i 15 V. Wskazują one, że wydajność prądowa silnie zależy od napięcia zasilania. Są to wartości typowe, przeciętne, jednak między egzemplarzami może wystąpić duży rozrzut. Dane innych producentów wskazują, że prądy wyjściowe mogą być albo kilka razy mniejsze, albo nawet dwa razy większe.
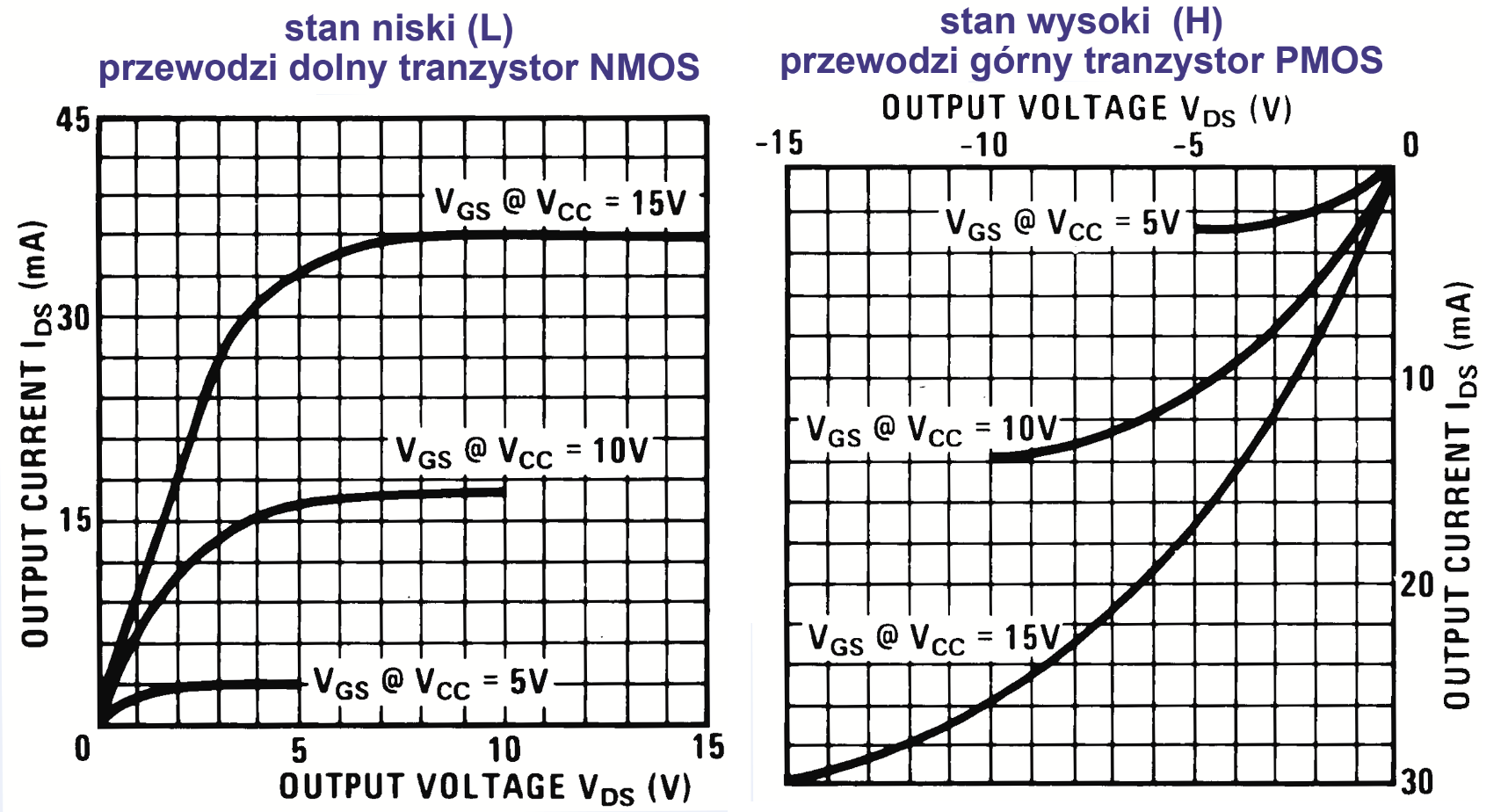
Rysunek 17
Ogólnie biorąc, układy rodziny CMOS4000 przy niskich napięciach zasilania mają małą wydajność prądową wyjść. Dużo więcej prądu mogą dostarczyć kostki rodziny 74HC, które mogą być zasilane napięciem w granicach 3…6 V. W rodzinie CMOS4000 znacznie większą wydajność prądową mają bufory i negatory z kostek 4050 i 4049 – rysunek 18 pokazuje typowe i gwarantowane charakterystyki dotyczące prądu wpływającego do wyjścia.
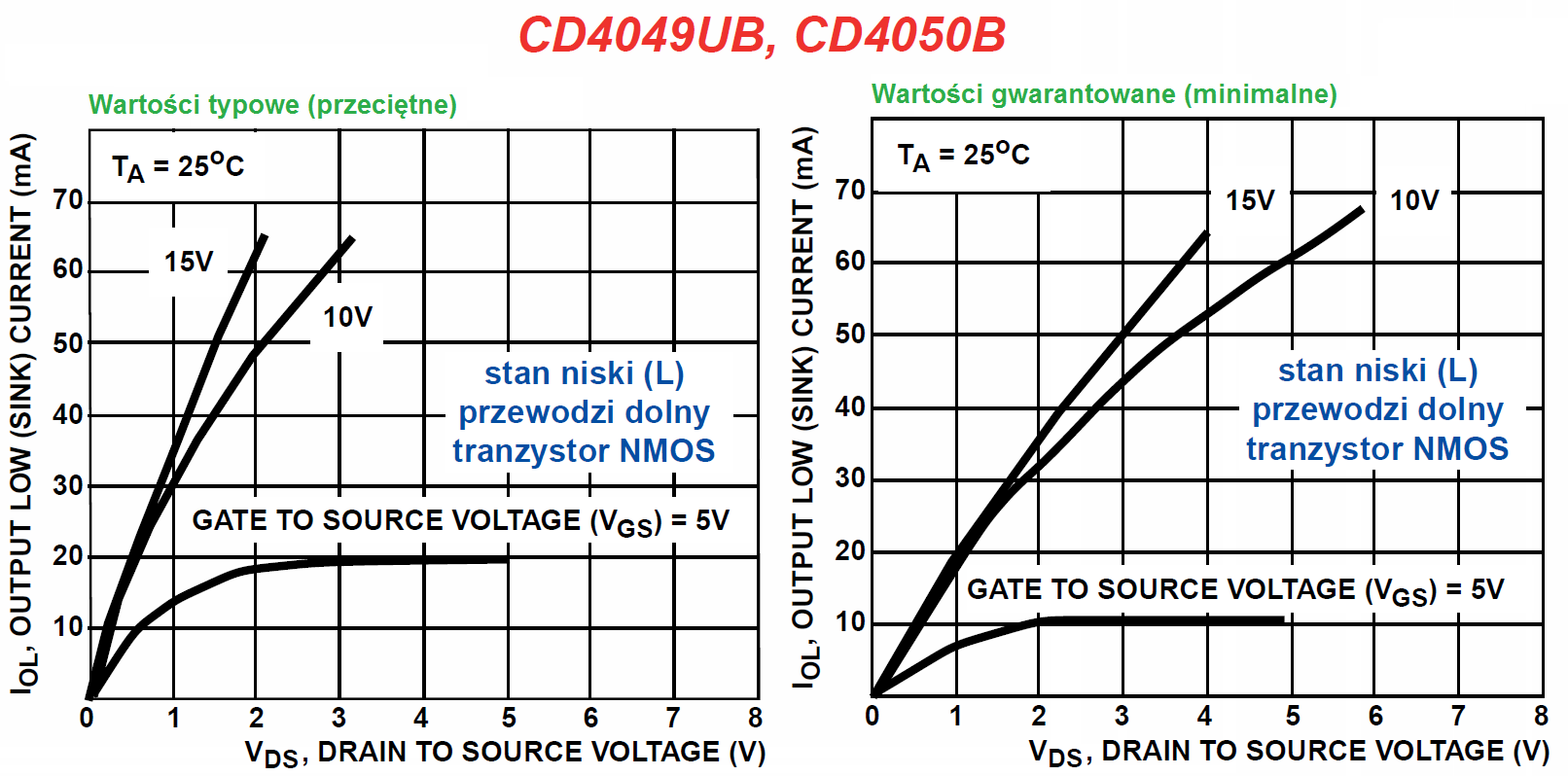
Rysunek 18
Wyjścia CMOS mogą bezpośrednio sterować obciążeniem, na przykład diodami LED według rysunku 19. Wartość rezystora ograniczającego prąd należy dobrać, stosownie do potrzeb. Przy niższych napięciach zasilania 3…7 V wydajność wyjściowa jest niewielka i w zasadzie można pominąć rezystor, co nie jest zalecane z uwagi na rozrzuty między egzemplarzami. Gdyby potrzebny był większy prąd, można połączyć równolegle inwertery/bramki z tego samego układu scalonego, jak to robiliśmy w układzie przetwornicy z rysunku 2.
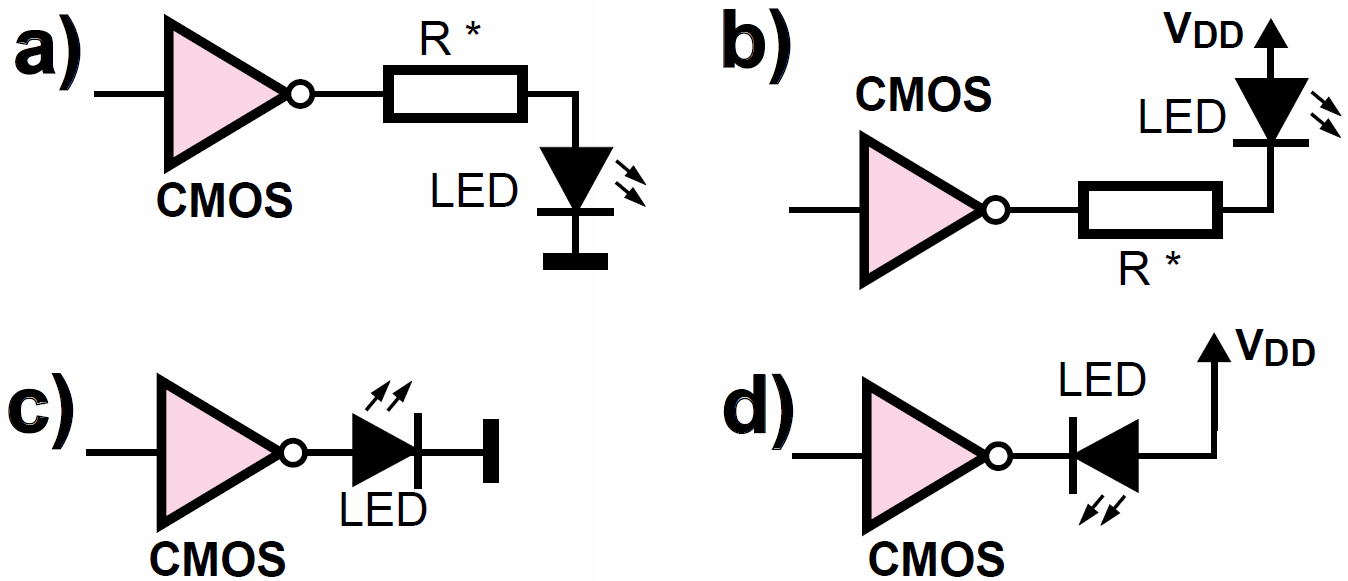
Rysunek 19
W wersjach bez rezystora prąd może być duży, kilkadziesiąt miliamperów i przy wyższych napięciach grozi przekroczeniem dopuszczalnej mocy strat, przegrzaniem i uszkodzeniem wyjścia. Zgodnie z rysunkiem 10, moc strat danego wyjścia (power dissipation), czyli iloczyn spadku napięcia wewnątrz układu scalonego i płynącego prądu nie powinna przekraczać 100 mW. Hobbyści mają prostszą zasadę dotyczącą mocy strat: układ scalony podczas pracy nie powinien być gorący.
Jeśli układ CMOS ma sterować obciążeniem o znacznym prądzie pracy, można według rysunku 20 dołączyć do wyjścia tranzystor mocy MOSFET N lub MOSFET P albo tranzystor NPN lub PNP (lub układ Darlingtona) wraz z dobranym do sytuacji rezystorem ograniczającym prąd bazy. Można też dołączyć symetryczny wtórnik według rysunku 20e.
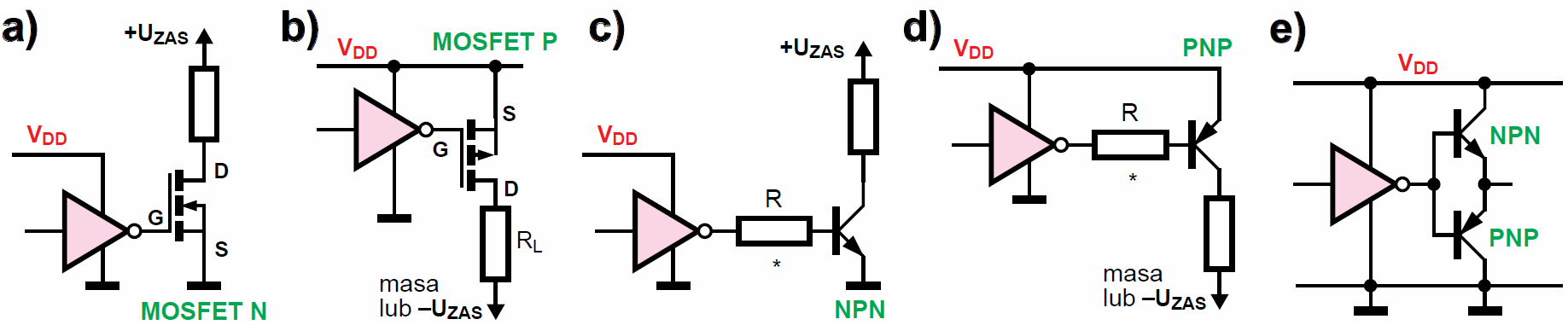
Rysunek 20
A teraz zrealizujmy układy. Prościutkie jednobramkowe generatory „ze szmitem” mają kiepską stabilność, ale często nie jest to istotne. Generator przebiegu prostokątnego o niezależnie ustawianych czasach impulsu i przerwy można byłoby zrobić według rysunku 21, czyli na bazie przerzutnika RS. Elementy R2C2 ustawiają czas trwania dodatniego impulsu (TI), a R1C1 wyznacza czas przerwy (TP). Gdy w punkcie Q panuje stan wysoki, a w punkcie Q\ stan niski, wtedy C1 szybko ładuje się przez diodę D1, natomiast C2 powoli rozładowuje się przez rezystor R2 i to właśnie stała czasowa R2C2 wyznacza czas trwania impulsu na wyjściu Q. Gdy napięcia w punkcie B osiągnie próg przełączania tego wejścia, przerzutnik zmieni stan wyjść. Na wyjściu Q pojawi się stan niski, a na Q\ – wysoki. Wtedy C2 szybko naładuje się przez diodę D2, natomiast C1 zacznie się pomału rozładowywać przez R1.
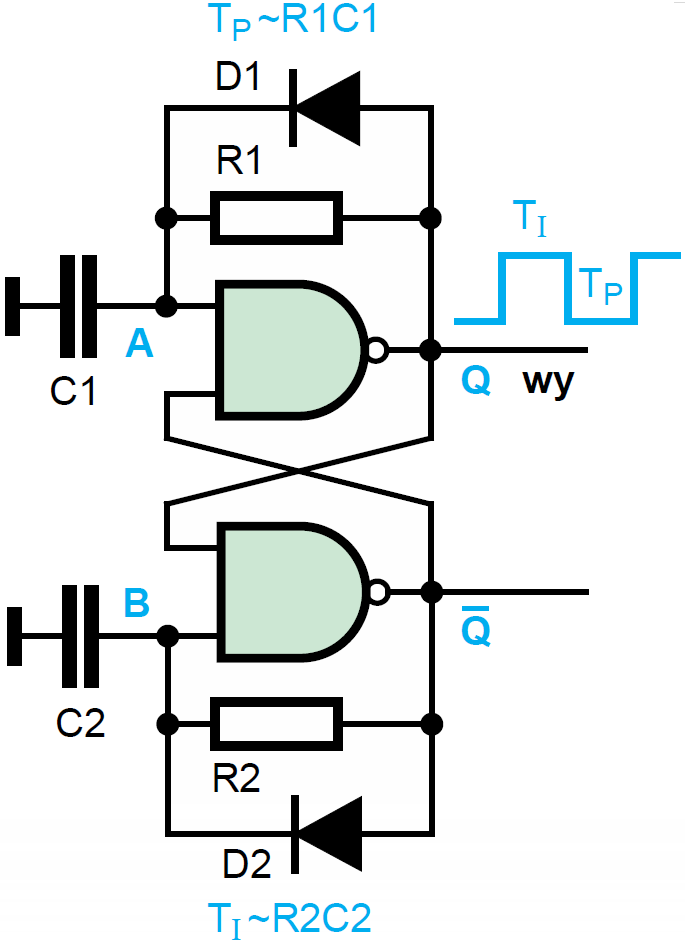
Rysunek 21
Zaletą jest tu niezależne ustawianie czasu trwania impulsu i przerwy oraz możliwość uzyskania bardzo długich czasów przez zastosowanie kondensatorów elektrolitycznych. Pojemności C1, C2 mogą mieć zdecydowanie różne wartości (100 pF…1000 uF), podobnie jak stałe czasowe R1C1 i R2C2. Można w ten sposób uzyskać przebiegi o współczynniku wypełnienia bardzo małym albo dużym (bliskim jedności), czyli dodatnie lub ujemne impulsy szpilkowe. Jednak warunkiem prawidłowego działania jest to, żeby kondensator o większej pojemności zdążył się naładować przez diodę w czasie, gdy przez rezystor rozładowuje się kondensator o mniejszej pojemności. W sumie rezystancja wewnętrzna i wydajność prądowa wyjścia bramki to czynnik ograniczający możliwe do osiągnięcia wartości współczynnika wypełnienia.
Generator o znacznie większym zakresie zmian wypełnienia można zrealizować według rysunku 22 i fotografii 23. Tu kondensatory są szybciej rozładowywane większym prądem przez tranzystory T1, T2.
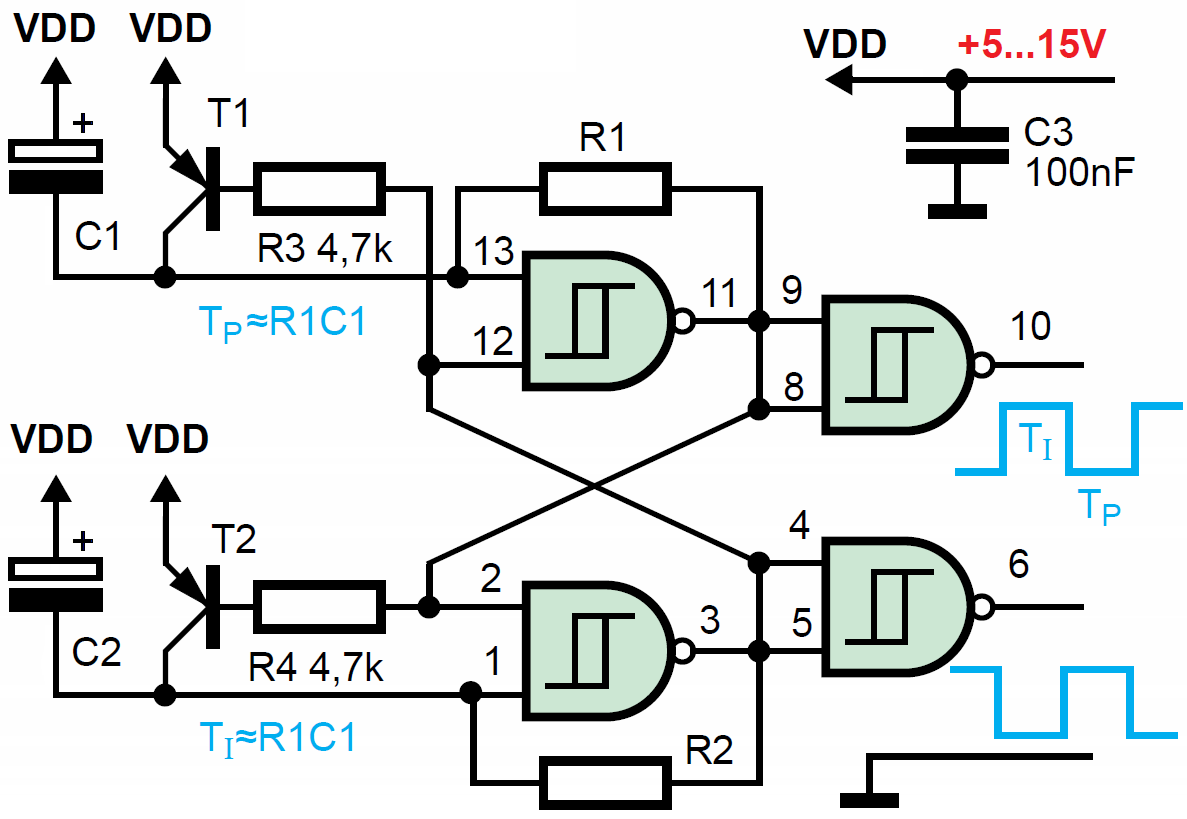
Rysunek 22
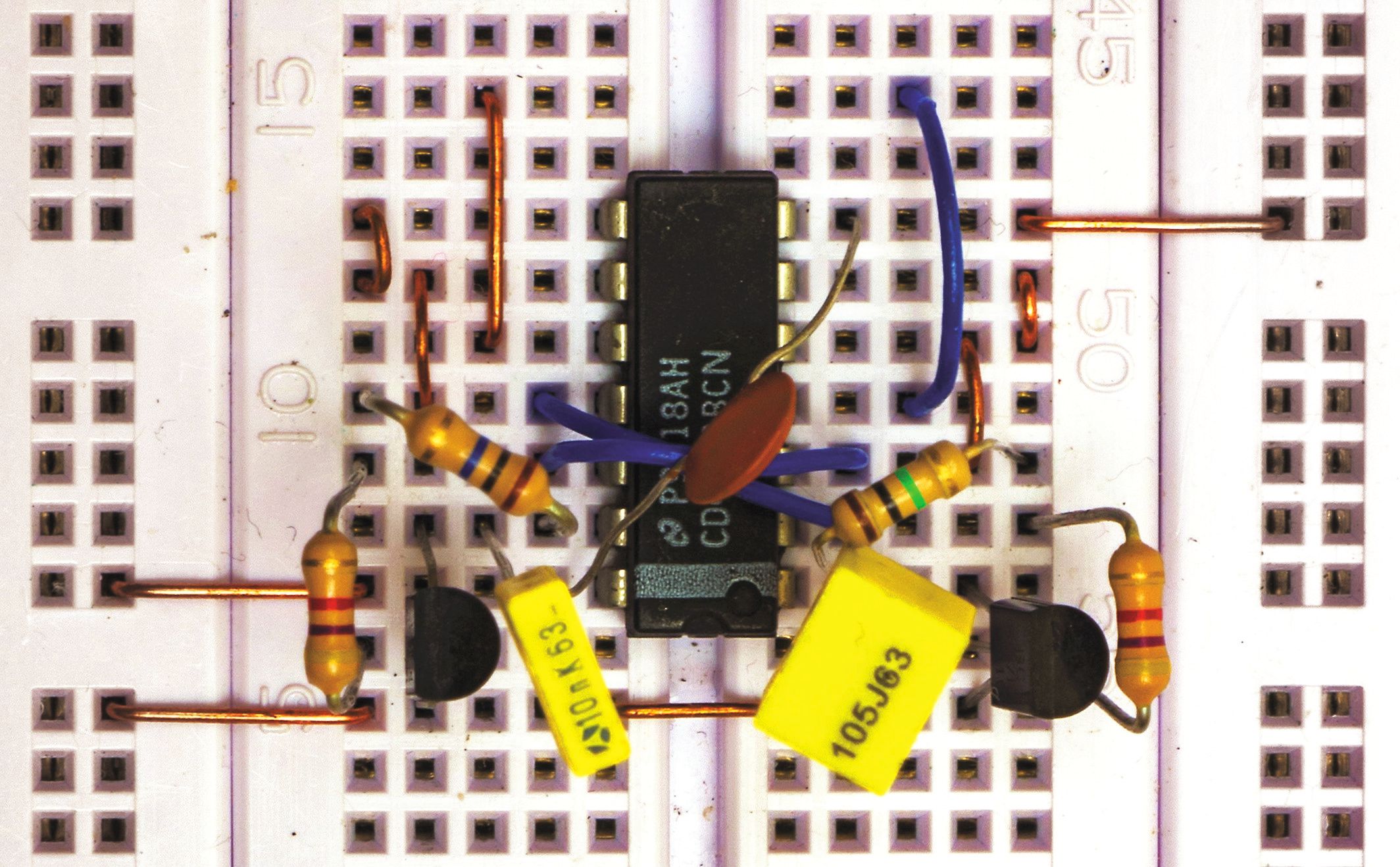
Fotografia 23
Aby uzyskać skrajne wartości współczynnika wypełnienia, nawet poniżej 1:10000, rezystancje R1, R2 powinny być możliwie duże, powyżej 100 kΩ, a gdy C1, C2 są kondensatorami stałymi, nawet do 10 MΩ. Taki generator na pewno do precyzyjnych nie należy, jednak może być przydatny w warsztacie elektronika.
Jeżeli jednak potrzebne byłyby impulsy szpilkowe o wypełnieniu mniejszym niż 1:10000, należy raczej do generatora o długim czasie powtarzania (czyli o bardzo małej częstotliwości) dodać obwód skracający impulsy według rysunku 24.
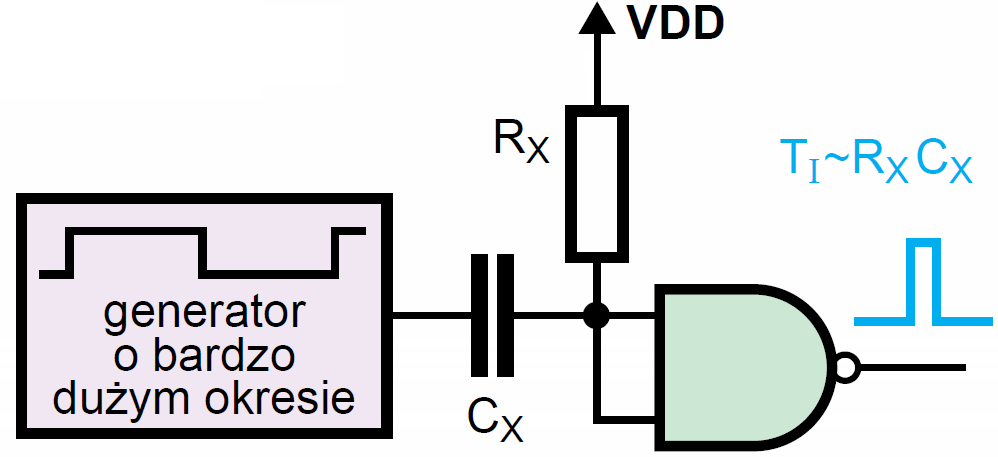
Rysunek 24
Na koniec zrealizuj układ „biegnące światełka według rysunku 25 i fotografii 26. Tak się złożyło, że z niektórymi posiadanymi przez mnie egzemplarzami kostki, łańcuch świetlny pracował błędnie, a powodem dziwnego zachowania, był omawiany w tym wykładzie problem przepływu nadmiernego prądu przez obwody ochronne wejść podczas przeładowywania kondensatora. Co dość dziwne, problem rozwiązało dodanie jednego tylko rezystora (R14 w obwodzie wejścia inwertera U1F).
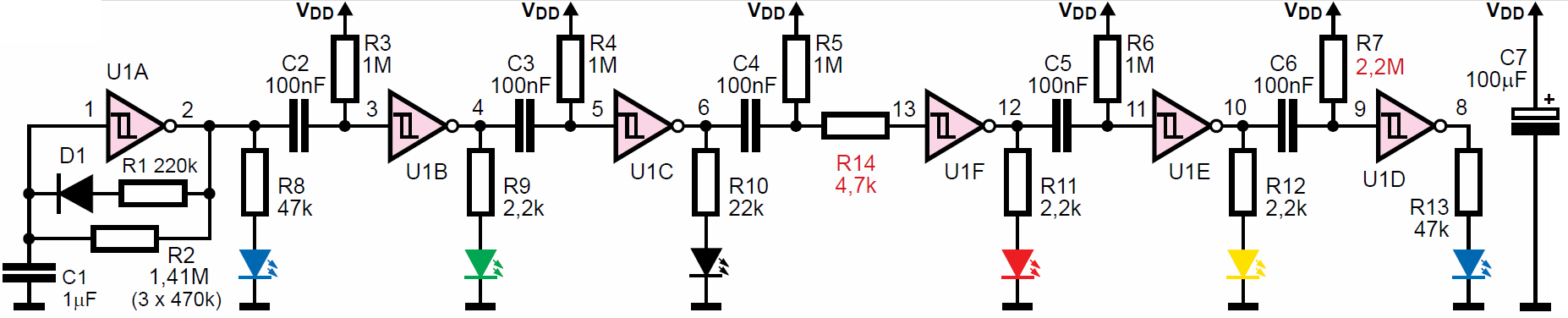
Rysunek 25
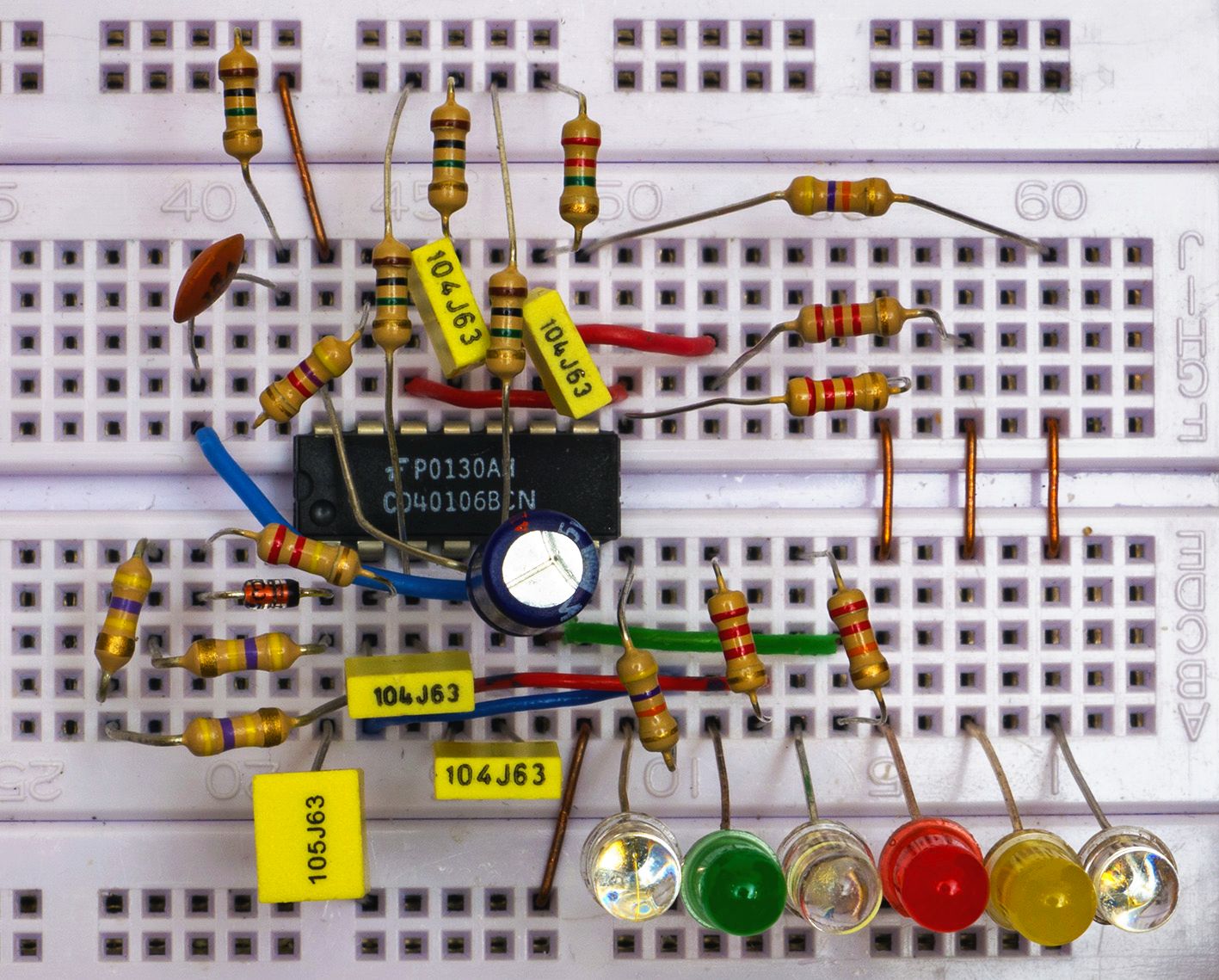
Fotografia 26
W następnym wykładzie zrealizujemy kolejne układy i będziemy się zajmować kwestią poboru prądu przez układy CMOS.
Piotr Górecki