PKE – Praktyczny Kurs Elektroniki (24) Elektroniczna ruletka i szalony kręciołek
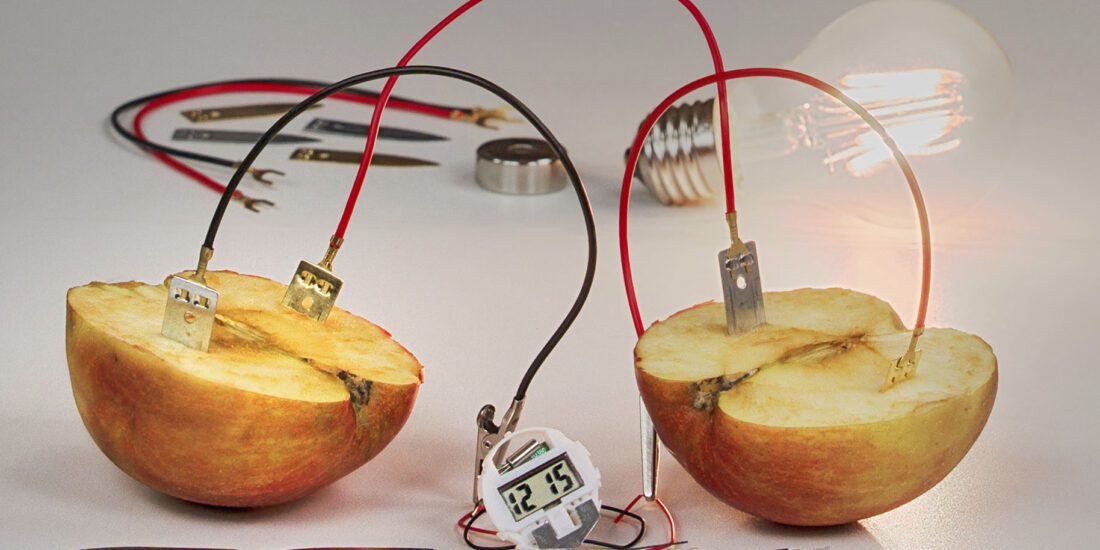
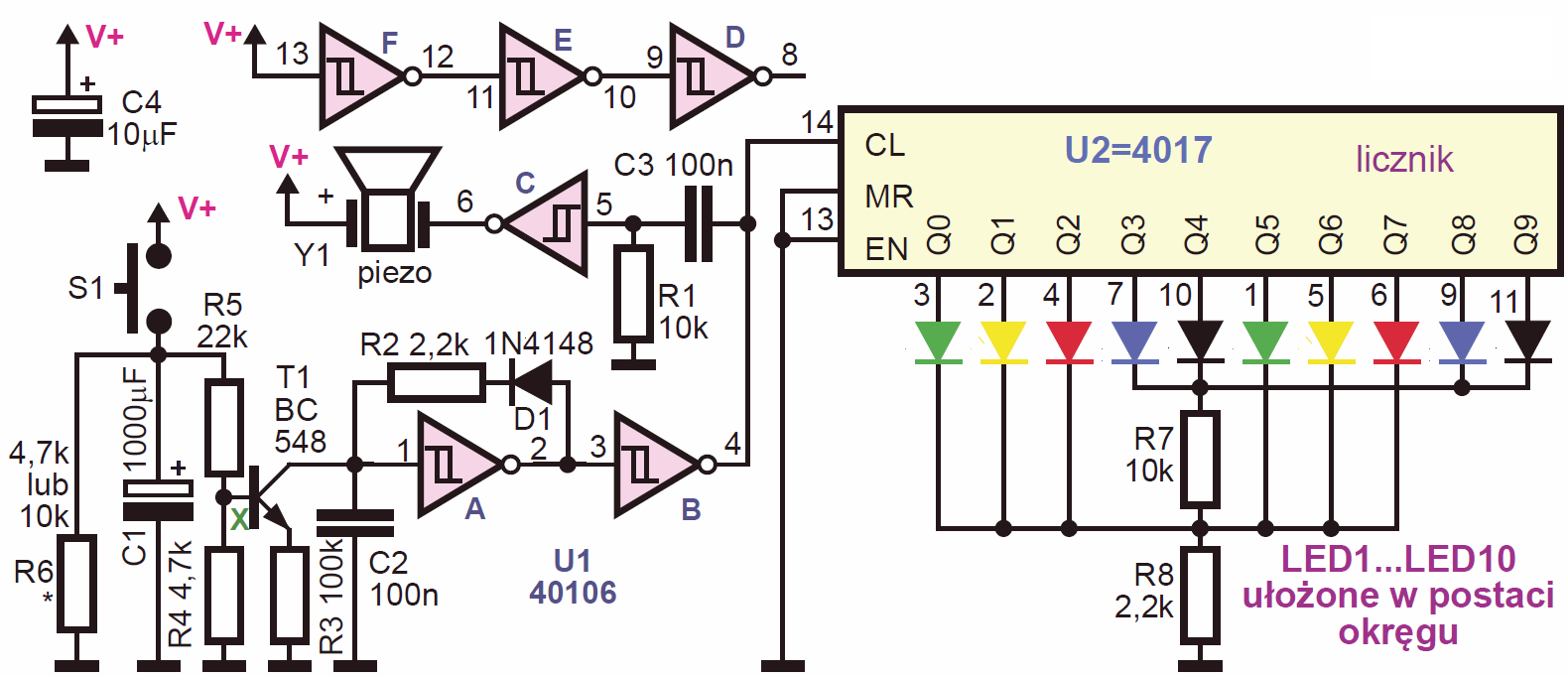
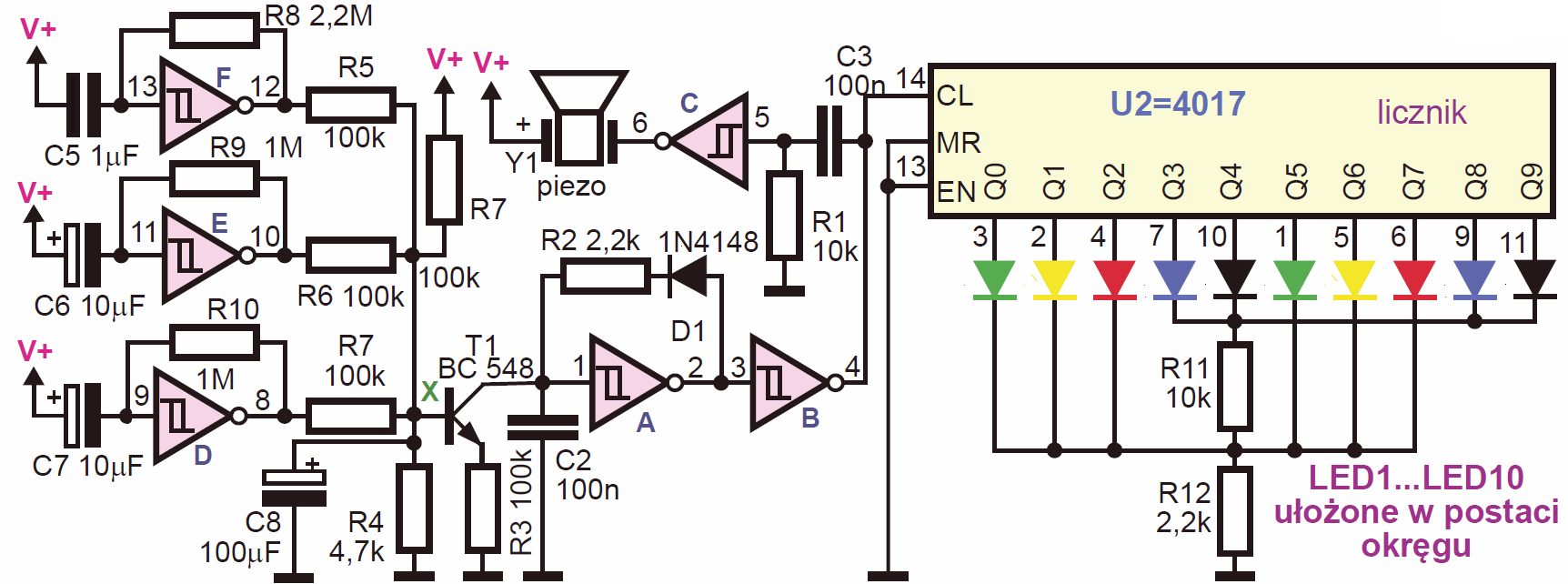
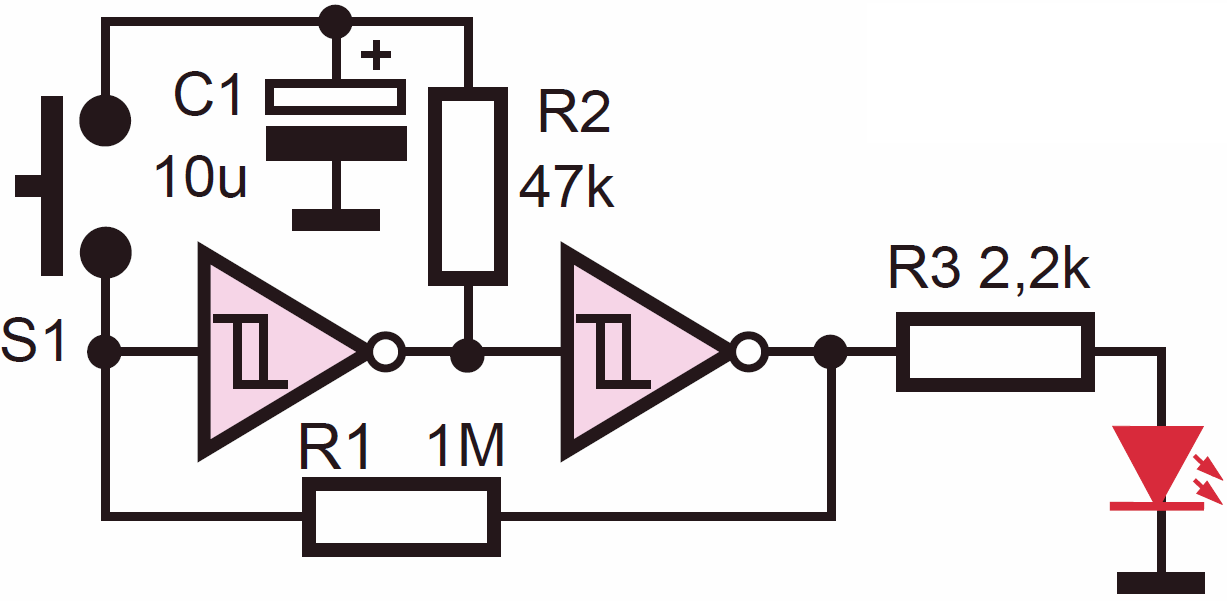
Fotografia tytułowa pokazuje układ prostej ruletki elektronicznej, której schemat pokazany jest na rysunku A.
Naciśnięcie przycisku S1 spowoduje szybkie wirowanie i migotanie punktu świetlnego, czemu towarzyszy charakterystyczny terkot. Po zwolnieniu przycisku, prędkość wirowania zmniejsza się, a po kilku sekundach punkt świetlny się zatrzymuje. Częstotliwość terkotania zmniejsza się, ponieważ pojedynczy stuk występuje wtedy, gdy zaświeca się kolejna dioda LED.
Rysunek A
Opis układu dla „zaawansowanych”
Na schemacie z rysunku A możemy wyróżnić szereg bloków, znanych nam już z poprzednich wykładów. Mamy tu licznik 4017 (U2), który zlicza impulsy podawane na nóżkę 14 i zaświeca kolejne diody LED, dołączone do wyjść. Diody te powinny być tak ułożone, żeby tworzyły kształt okręgu.
Bramka U1A wraz z elementami D1, R2, T1, R3 tworzy znany z poprzedniego wykładu przetwornik napięcia na częstotliwość. Po naciśnięciu przycisku S1, kondensator C1 zostaje naładowany, a pełne napięcie zasilające podane jest na dzielnik R5, R4. Napięcie na bazie T1 wynosi około 18% napięcia zasilającego, a tranzystor T1 jest źródłem prądowym. Znaczny prąd tego źródła prądowego powoduje, że częstotliwość generatora jest dość duża. Po zwolnieniu przycisku S1, kondensator zaczyna się rozładowywać przez R5 i przez R6. Napięcie maleje, maleje też prąd tranzystora T1 i zmniejsza się częstotliwość generatora i prędkość wirowania punktu świetlnego. W pewnym momencie tranzystor zostaje zatkany i punkt świetlny się zatrzymuje.
Każde aktywne narastające zbocze na wejściu CL licznika 4017 powoduje nie tylko zaświecenie kolejnej diody, ale też wywołuje krótki impuls dźwiękowy, stuk brzęczyka Y1.
Oczywiście możesz zmieniać wartości elementów. Stała czasowa R1C3 decyduje o głośności i tonie stuku. Częstotliwość głównego generatora, czyli maksymalna szybkość „wirowania” wyznaczona jest głównie przez elementy C2 i R3. Czas trwania cyklu możesz regulować zmieniając wartość R6.
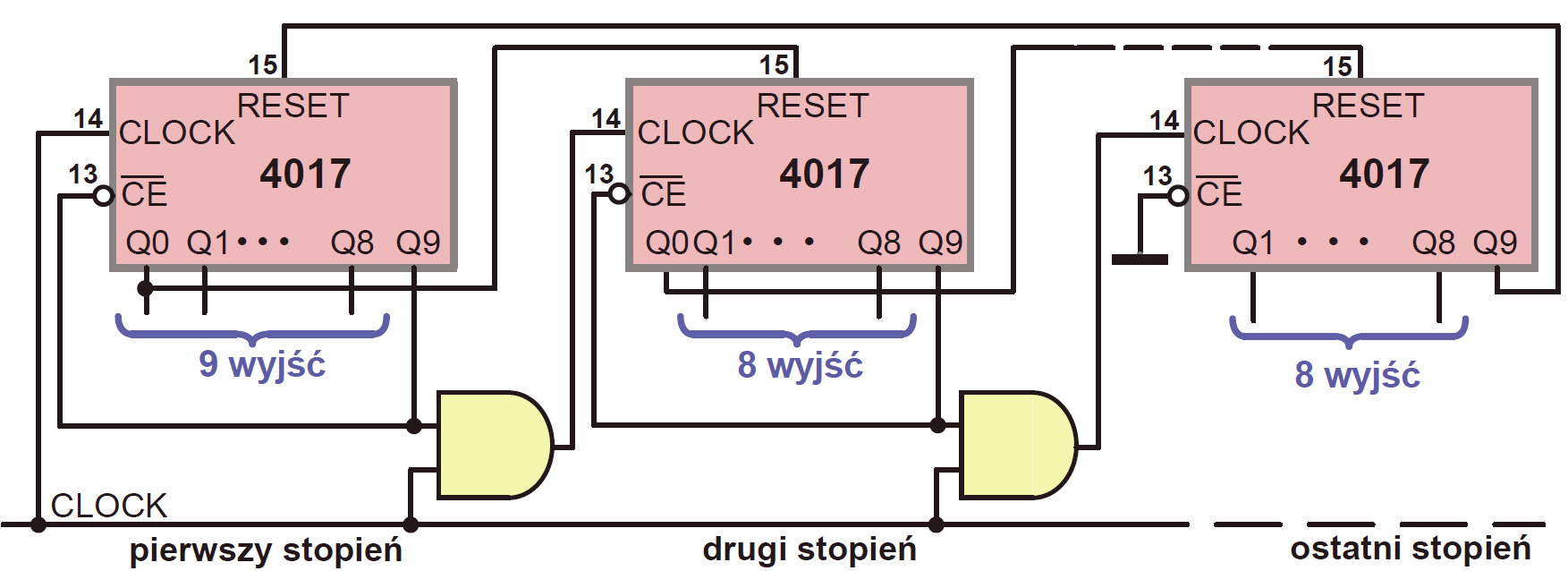
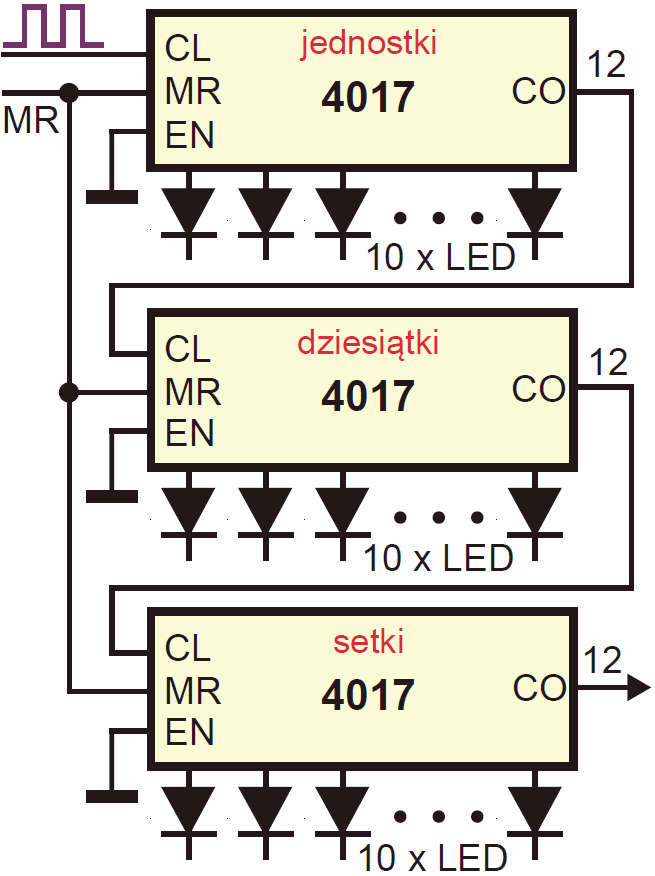
W tej podstawowej, bardzo prostej wersji ruletka jest 10-pozycyjna. Można dowolnie zwiększyć liczbę diod, zwiększając pojemność licznika. Trzeba wtedy zastosować więcej niż jedną kostkę 4017 i połączyć je w sposób, pokazany w karcie katalogowej licznika 4017 – rysunek B.
Rysunek B
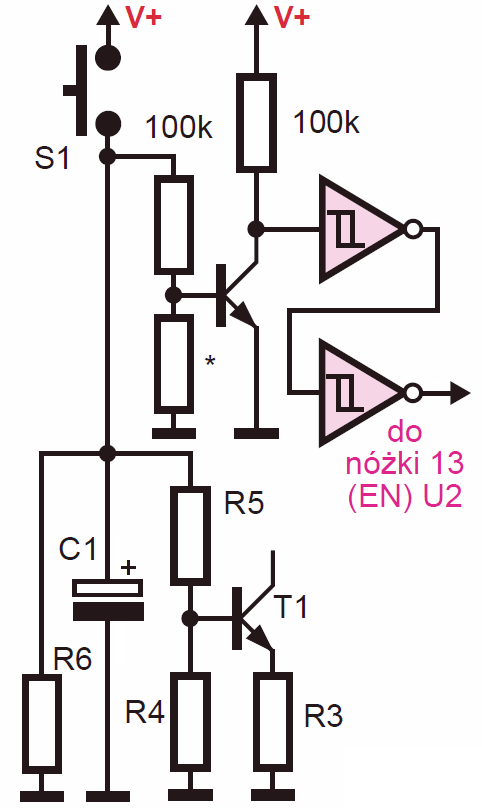
Aby otrzymać pełnowartościową ruletkę elektroniczną, należałoby jeszcze dodać obwód skutecznego „zatrzymywania”. W przedstawionej najprostszej wersji na końcu cyklu może się zdarzyć, że punkt świetlny dodatkowo przeskoczy o jedną pozycję po pewnym czasie, z uwagi na płynne zatykanie tranzystora T1. Aby temu zapobiec, należałoby dodać obwód zatrzymujący zliczanie, na przykład według rysunku C. Wartość rezystora oznaczonego gwiazdką należy dobrać, zależnie od napięcia zasilania, żeby zatrzymanie ruchu punktu świetlnego następowało podobnie jak w klasycznej ruletce.
Rysunek C
Na bazie prezentowanego układu można też zrobić inne efekty świetlne. Można na przykład wykorzystać generator przebiegów pseudoprzypadkowych, wykorzystany wcześniej w wykładzie 22 w elektronicznej świeczce. W układzie z rysunku D z trzech dotychczas niewykorzystanych inwerterów budujemy taki generator, który będzie zmieniał częstotliwość generatora VCO na bramce U1A.
Rysunek D
Otrzymujemy „szalony kręciołek”, w którym częstotliwość wirowania diod zmienia się w dziwny sposób. Fotografia E pokazuje model. Zmiany częstotliwości byłyby skokowe, aby je „złagodzić”, między punkt X i masę został włączony kondensator C8 o pojemności 100 uF. Także i tu możesz zmieniać wartości elementów RC.
Fotografia E
Poznajemy elementy i układy elektroniczne
W poprzednim wykładzie wspomnieliśmy o tym, że dziś realizacja w jednym układzie scalonym tysięcy, milionów, a nawet miliardów bramek nie jest problemem i że istnieje mnóstwo układów o bardzo skomplikowanej strukturze wewnętrznej, które są swego rodzaju „półproduktami”, ponieważ można je samodzielnie zaprogramować, by pełniły potrzebne, często bardzo skomplikowane zadania.
Dowiedziałeś się, że dwie główne grupy to: układy PLD oraz dużo popularniejsze mikroprocesory. Programowanie układów PLD polega na takim połączeniu elementarnych „cegiełek” by uzyskać strukturę logiczną, która będzie realizować postawione zadanie. Natomiast programowanie mikroprocesorów nie polega na zmianie ich struktury wewnętrznej, tylko polega na wpisaniu do ich pamięci programu, przepisu działania, który będzie realizował postawione zadanie z wykorzystaniem dostępnych w danym procesorze struktur.
Do realizacji prostszych funkcji wystarczą mikroprocesory 8-bitowe, w których przetwarzane są dane ośmiobitowe. Większe możliwości i większą szybkość realizacji zadań zapewniają procesory 16-bitowe, a w komputerach stosowane są procesory 32- i 64-bitowe. O wydajności (mocy obliczeniowej) decyduje zarówno liczba jednocześnie przetwarzanych bitów, jak też częstotliwość sygnału zegarowego. Wydajne procesory, stosowane w komputerach, a także coraz częściej w tabletach i smartfonach, jako główne zadanie mają przeprowadzanie obliczeń matematycznych. Można powiedzieć, że takie „duże procesory” to tylko szybka i wydajna „goła maszynka do obliczeń matematycznych”. W sposób matematyczny przetwarzane są zarówno sygnały obrazu, dźwięku, jak też inne.
Natomiast do wykonania wielu innych zadań wystarczą „małe” procesory 8-bitowe, co najwyżej 16-bitowe. Już od dawna, dla wygody konstruktów, takie prostsze procesory, w jednym układzie scalonym, oprócz „gołej maszynki obliczeniowej”, zawierają też dodatkowe bardzo pożyteczne bloki pomocnicze, dzięki czemu w jednym układzie scalonym mamy wszystko, co potrzeba do wykonania nawet dość złożonego zadania. Są to mikroprocesory jednoukładowe, a ponieważ zawierają dodatkowe bloki, często są nazywane mikrokontrolerami jednoukładowymi. Najpopularniejsze mikrokontrolery jednoukładowe zasilane są napięciem w zakresie 1,8 … 6 V, zwykle 3…5 V, a ich ceny wynoszą od kilku do najwyżej kilkudziesięciu złotych.
Mikrokontrolery jednoukładowe zawierają tzw. pamięć operacyjną, potrzebną podczas pracy procesora oraz pamięć programu, gdzie trwale przechowywany jest „przepis działania” oraz szereg bloków, które nie są bezpośrednio związane z obliczeniami matematycznymi.
Fotografia 1 pokazuje jednoukładowy mikroprocesor ATmega32 popularnej rodziny AVR firmy Atmel w obudowie przewlekanej DIL.
Fotografia 1
Rysunek 2 pokazuje schemat blokowy tego procesora. Żółtą podkładką wyróżniony jest „właściwy procesor”, oznaczony CPU (Central Processing Unit). Zawiera on między innymi jednostkę ALU (Arithmetic Logic Unit), gdzie na liczbach 8-bitowych dokonywane są wszelkie operacje logiczne i matematyczne. Warto dodać, że nazwy mikrokontroler i mikroprocesor są stosowane wymiennie, choć ściślej biorąc, procesorem należałoby nazywać jedynie jednostkę CPU.
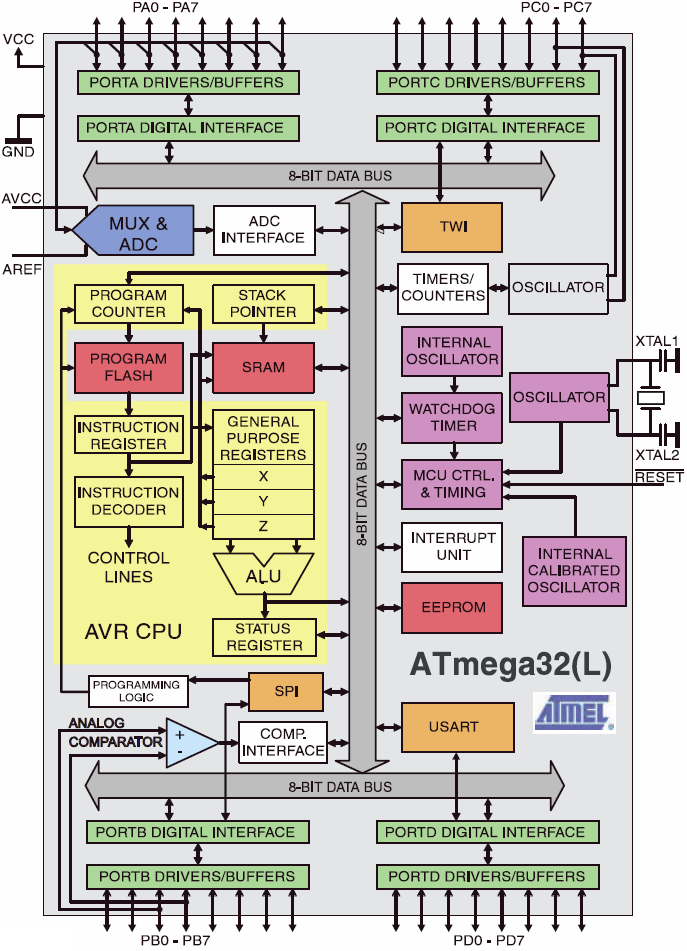
Rysunek 2
Z CPU współpracują trzy pamięci (na rysunku 2 wyróżnione kolorem czerwonym). Pamięć operacyjna SRAM (Static RAM) to pamięć o bardzo dużej szybkości zapisu/odczytu, ale ulotna – jej zawartość znika po wyłączeniu zasilania. Pamięć ta ma wiele wspólnego ze znanymi nam przerzutnikami, można powiedzieć, że składa się z mnóstwa przerzutników.
Drugi główny rodzaj, to powolniejsza pamięć nieulotna, która zachowuje zawartość po wyłączeniu zasilania przez dziesiątki, a może i setki lat. W mikrokontrolerach jest to pamięć FLASH dla programu i nieulotna pamięć pomocnicza EEPROM do trwałego pamiętania niewielkiej ilości danych. Pamięci nieulotne EEPROM, FLASH opierają swoje działanie na dość prostej zasadzie, a mianowicie elementem pamiętającym jest tam… pojedynczy tranzystor MOSFET, gdzie jak wiesz, elektrodą sterującą jest bramka. Napięcie bramki decyduje o tym, czy tranzystor przewodzi, czy jest zatkany. Jednocześnie wiemy, że obwód bramkowy MOSFET-a jest maleńkim kondensatorem, co możemy zobrazować jak na rysunku 3a. I właśnie w pamięciach nieulotnych elementami pamiętającymi są w sumie tranzystory MOSFET, ale nietypowe, mające bramkę, ale… bramkę niepodłączoną, zwaną bramką pływającą. Taki tranzystor pamiętający ma jakby wbudowany „kondensator bramkowy” (CGS), jak pokazuje rysunek 3b. Można powiedzieć w uproszczeniu, że jeżeli ten kondensator jest naładowany, to tranzystor pozostaje otwarty.
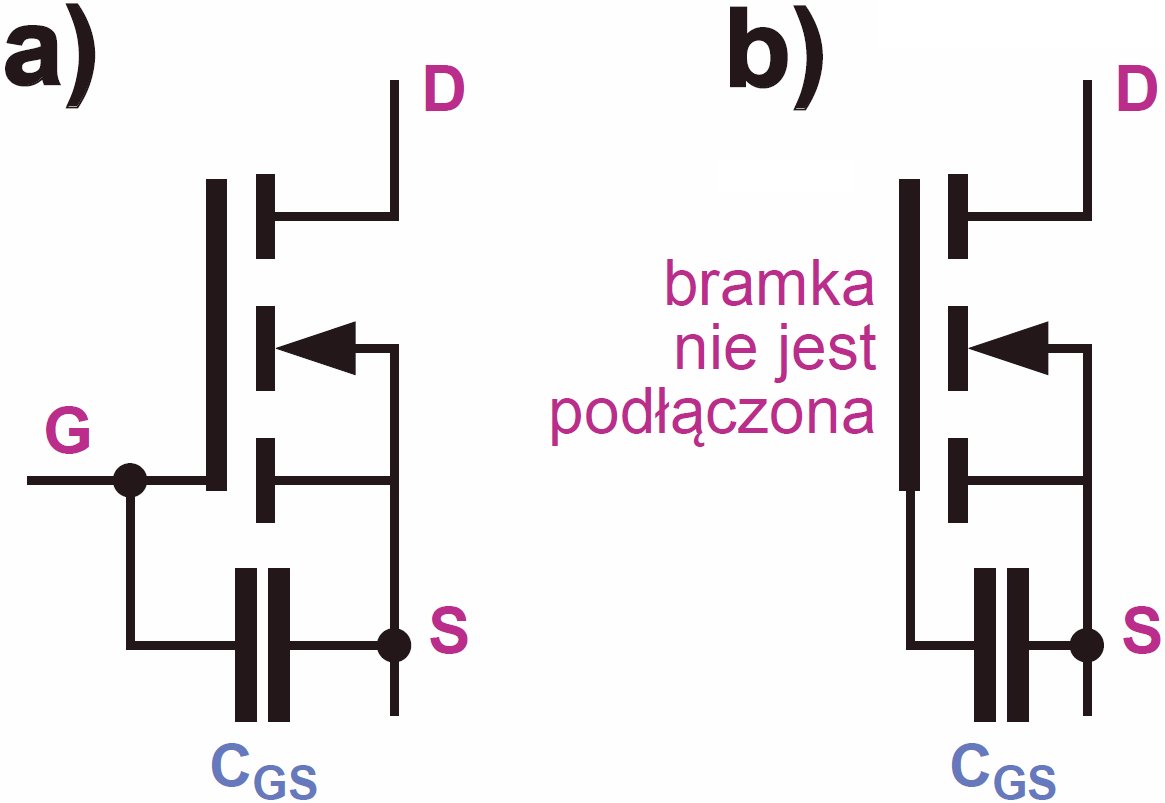
Rysunek 3
Gdy „kondensator bramkowy” jest rozładowany – tranzystor jest zatkany. W ten sposób mamy możliwość trwałego zapamiętania (na wiele lat) dwóch stanów. Pomimo braku elektrycznego połączenia takiej bramki, można ją „zdalnie” naładować i rozładować. W grę wchodzą tajemnicze zjawiska kwantowe (tunelowe), ale w uproszczeniu można powiedzieć, że zmianę stanu naładowania pojemności bramkowej uzyskuje się za pomocą specjalnych obwodów sterujących i podwyższonych napięć, które jakby „przebijają” cieniutką warstewkę izolatora pływającej bramki. Jeden taki tranzystor może zapamiętać (co najmniej) jeden bit informacji, a we współczesnych urządzeniach cyfrowych wykorzystujemy pamięci o pojemności wielu megabajtów, a nawet gigabajtów. Zapewne i Ty masz małego pendrajwa (pendrive), który jest właśnie tego rodzaju pamięcią nieulotną FLASH. Jeżeli przykładowo jego pojemność wynosi „tylko” 1 GB (około 1 miliard bajtów) czyli 8 miliardów bitów, to może on zawierać kilka miliardów takich tranzystorów pamiętających. Natomiast w małych 8-bitowych mikroprocesorach jednoukładowych, powszechnie wykorzystywanych przez hobbystów, nieulotna pamięć programu FLASH zwykle jest wielokrotnie mniejsza i ma pojemność w zakresie 1 kB do 256 kB. Ulotna pamięć operacyjna SRAM jest jeszcze mniejsza i zwykle ma pojemność od kilkuset bajtów do kilku kilobajtów.
Podczas pracy procesora, wykonywane są kolejne rozkazy zawarte w pamięci programu. Odbywa się to bardzo szybko – w ciągu sekundy mogą być wykonane miliony prostych, elementarnych operacji. I właśnie ta ogromna szybkość wykonywania prostych instrukcji umożliwia procesorowi zrealizowanie nawet bardzo skomplikowanych zadań.
Wszystko to odbywa się w takt sygnału zegarowego. Obwody czasowe na rysunku 2 wyróżnione są kolorem fioletowym). Dawniej standardowo generator zegarowy w procesorze współpracował z rezonatorem kwarcowym (XTAL), co zapewniało także dużą dokładność odmierzania czasu. W tym celu przewidziane były/są dwie końcówki do podłączenia rezonatora kwarcowego. Dziś często pracą procesora steruje mniej dokładny wewnętrzny generator zegarowy, którego częstotliwość wyznaczają wbudowane elementy RC.
Mikrokontroler, oprócz „procesora właściwego”, czyli CPU, pamięci i obwodów zegarowych, zawiera też różne inne układy i bloki pomocnicze. Poszczególne bloki komunikują się ze sobą za pomocą wspólnej (8-bitowej) szyny danych (kolor szary).
Do bardzo pożytecznych bloków należą uniwersalne dość skomplikowane liczniki/timery (8- lub 16-bitowe) które zwykle mogą zliczać w górę lub w dół i można do nich wpisywać liczby. Dlatego mogą służyć nie tylko jako liczniki zdarzeń czy do odmierzania czasu, ale także do generowania przebiegu zmiennego o określonym współczynniku wypełnienia, czyli mogą pełnić rolę generatora – przetwornika PWM.
Standardowym wyposażeniem mikrokontrolera jest też tzw. watchdog, który służy do „budzenia” procesora ze stanu uśpienia i może być wykorzystany do przywrócenia prawidłowej pracy po wystąpieniu błędów oraz do zdecydowanego zmniejszenia zużycia energii (procesor „śpi” i jest „budzony” co jakiś czas na krótką chwilę, by zrealizować zadania). Praktycznie każdy mikroprocesor ma wejście, końcówkę zerującą RESET, która pozwala rozpocząć prawidłową pracę procesora od początku programu.
Pozostałe końcówki mikroprocesora mogą pełnić rozmaite funkcje, stosownie do tego jak zostały skonfigurowane na początku pracy programu lub później. Te pozostałe końcówki zorganizowane są najczęściej w ośmiobitowe porty (kolor zielony), które mają sprytną, dość skomplikowaną budowę, ponieważ zależnie od programu, mogą pełnić rozmaite funkcje.
Otóż końcówki portów z zasady mogą pracować jako klasyczne wejścia albo wyjścia (także trójstanowe), na których występują sygnały cyfrowe. Ale niektóre linie portów mogą też pełnić inne, „nietypowe” funkcje. Często mikroprocesor ma współpracować z czujnikami i przetwornikami analogowymi. Wtedy trzeba sprawdzać, a także mierzyć nie tylko obecność czy brak, ale też wartość napięcia. Do sprawdzenia/porównania wartości napięć może posłużyć komparator analogowy, wyróżniony na rysunku 2 kolorem jasnoniebieskim.
Dla ułatwienia tego rodzaju zadań, wiele mikrokontrolerów ma też wbudowany wewnętrzny przetwornik analogowo-cyfrowy (ADC = Analog-Digital Converter), który mierzy napięcie i określa wynik w postaci liczby. Często przetwornik ADC jest jeden, ale poprzedza go analogowy multiplekser (MUX), przez co możliwe jest mierzenie napięć w kilku punktach. Na rysunku 2 obwody (ośmiokanałowego) przetwornika ADC wyróżnione są kolorem niebieskim.
Niektóre końcówki portów mikrokontrolera mogą też być wejściami czy też wyjściami o specyficznym przeznaczeniu – mają specjalizowane obwody i mogą pełnić rolę portów standardowych łączy, na przykład popularnego RS-232 (UART), TWI, SPI czy aktualnie najpopularniejszego USB. Bardziej rozbudowane mikrokontrolery jednoukładowe mają więcej portów (liczba nóżek może sięgać 100) i mogą mieć dodatkowe obwody dedykowane do konkretnych celów, na przykład do obsługi zaawansowanego wyświetlacza LCD.
Ale warto wiedzieć, że dostępne są też mikrokontrolery o zredukowanej liczbie końcówek, na przykład w rodzinie Atmel AVR są to ATtiny 4/5/9/10 – fotografia 4.
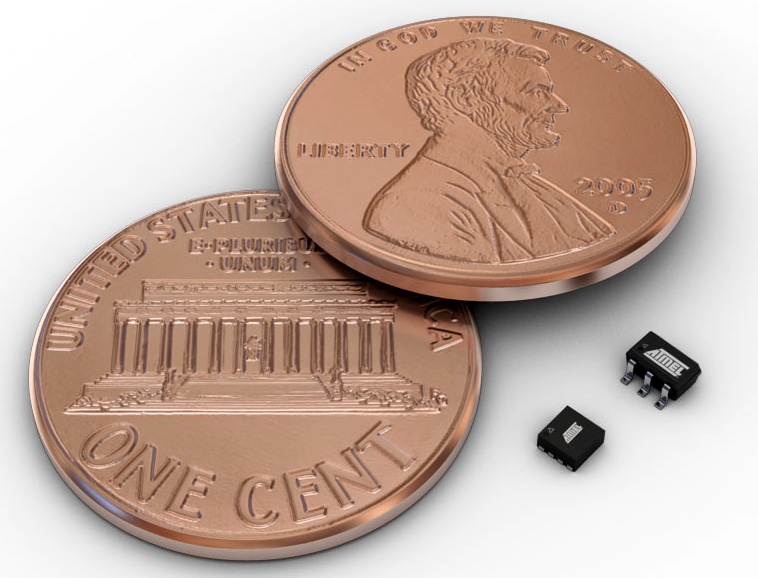
Fotografia 4
Ich struktura wewnętrzna jest analogiczna jak w dużym ATmega32, tylko znacznie uproszczona – rysunek 5. Mniej jest obwodów pomocniczych i portów, a i pojemności pamięci są znacznie mniejsze (brak też pamięci EEPROM). W niektórych zastosowaniach wystarczy taki skromny mikroprocesor z sześcioma wyprowadzeniami, z których dwa to zasilanie, a cztery to uniwersalne końcówki wejścia/wyjścia o funkcjach zależnych od programu.
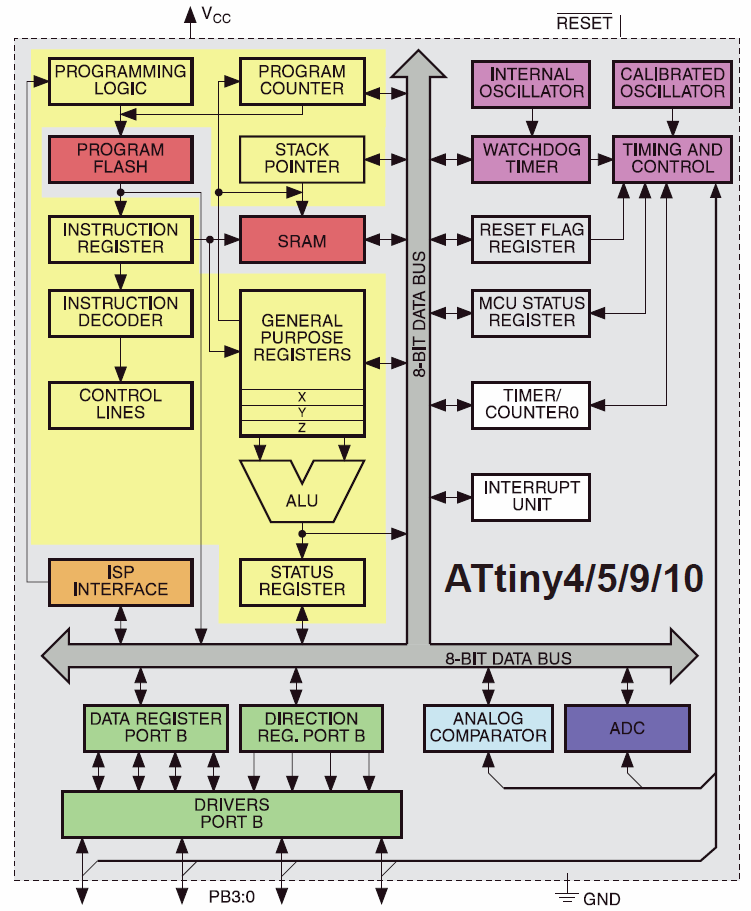
Rysunek 5
Liczba dostępnych rodzin i wersji mikrokontrolerów jednoukładowych różnych producentów może przyprawić o zawrót głowy. Niemniej procesory danej rodziny, pomimo różnic wyposażenia i możliwości, mają taką samą strukturę oraz zasady programowania.
Wbrew pozorom, programowanie okazuje się proste. Aby ułatwić pisanie programów dla mikroprocesorów jednoukładowych, stworzono programy na komputer PC, tzw. kompilatory, a także całe pakiety wspomagające. Wystarczy zainstalować na PC-cie lub laptopie jeden z takich kompilatorów i przy jego pomocy napisać program w tzw. postaci źródłowej (najlepiej z komentarzami, opisującymi działanie programu). Na tym etapie wykorzystuje się różne języki programowania, w tym popularny i prosty BASIC oraz znacznie lepszy, ale trudniejszy język C. Na rysunku 6 (z Wikipedii) masz zrzut ekranu z pakietu BASCOM AVR.
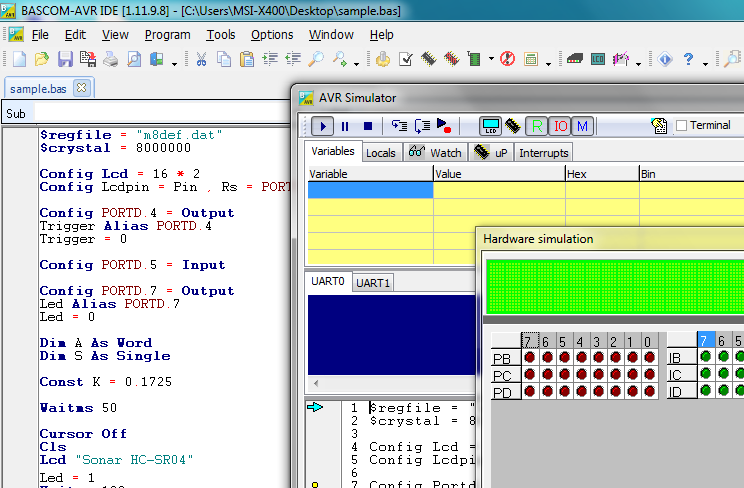
Rysunek 6
Po napisaniu w jednym z języków programowania, program źródłowy należy sprawdzić oraz skompilować, czyli zamienić na postać zrozumiałą dla procesora – na program wynikowy. Ten program wynikowy trzeba wpisać do pamięci FLASH mikrokontrolera.
Do zaprogramowania, czyli wpisania skompilowanego pliku programu do pamięci procesora najczęściej służy prosta przystawka włączana między port USB komputera PC, a końcówki jednego z portów mikrokontrolera. Program mikrokontrolera można zmieniać, modyfikować i wielokrotnie wpisywać do jego pamięci, co jest bardzo pożyteczne na etapie tworzenia, ulepszania i usuwania błędów (odpluskwiania – debugging).
W sumie programowanie procesorów naprawdę nie jest trudne, trzeba jednak zrozumieć działanie procesora, jego budowę oraz poznać podstawy jakiegoś języka programowania i znaczenie poszczególnych rozkazów. Praktyka pokazuje, że z powodzeniem radzą sobie z tym nawet osoby kilkunastoletnie, a także osoby starsze, które w szkole uczyły się elektroniki opartej na lampach elektronowych. Opanowanie programowania mikrokontrolerów daje ogromne możliwości, ograniczone tylko przez wyobraźnię.
W ramach kursu PKE mikroprocesorów wykorzystywać nie będziemy, ale już od poprzedniego wykładu realizujemy proste układy peryferyjne, które mają lub mogą mieć związek z mikroprocesorami. I dlatego teraz od czujnika dotykowego przejdźmy do pamięci nieulotnych EPROM, EEPROM i Flash. Czujniki dotykowe i zbliżeniowe (pojemnościowe) badaliśmy w wykładzie 7, a do ich budowy wykorzystaliśmy tranzystory. Ogromna rezystancja wejściowa bramek CMOS umożliwia bardzo łatwą realizację takich czujników. Wspomnieliśmy już o tym pod koniec wykładu 22. Oczywisty przykład masz na rysunku 7 – zamiast przycisków wykorzystujemy rezystancję palca dotykającego dwóch elektrod czujnika (rezystancja R1 powinna być duża, powyżej 1 MΩ).
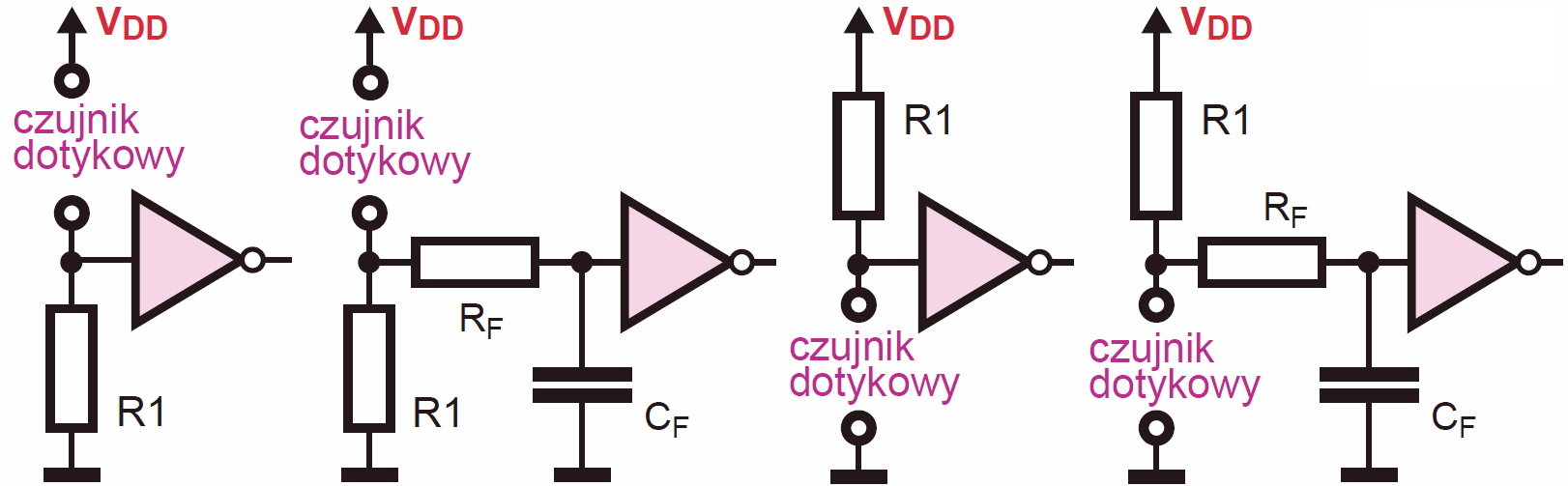
Rysunek 7
Obwody RF, CF to opcjonalne filtry, likwidujące ewentualne zakłócenia impulsowe. Mogą one też zapewniać zerowanie po włączeniu zasilania – przykład na rysunku 8.
Rysunek 8
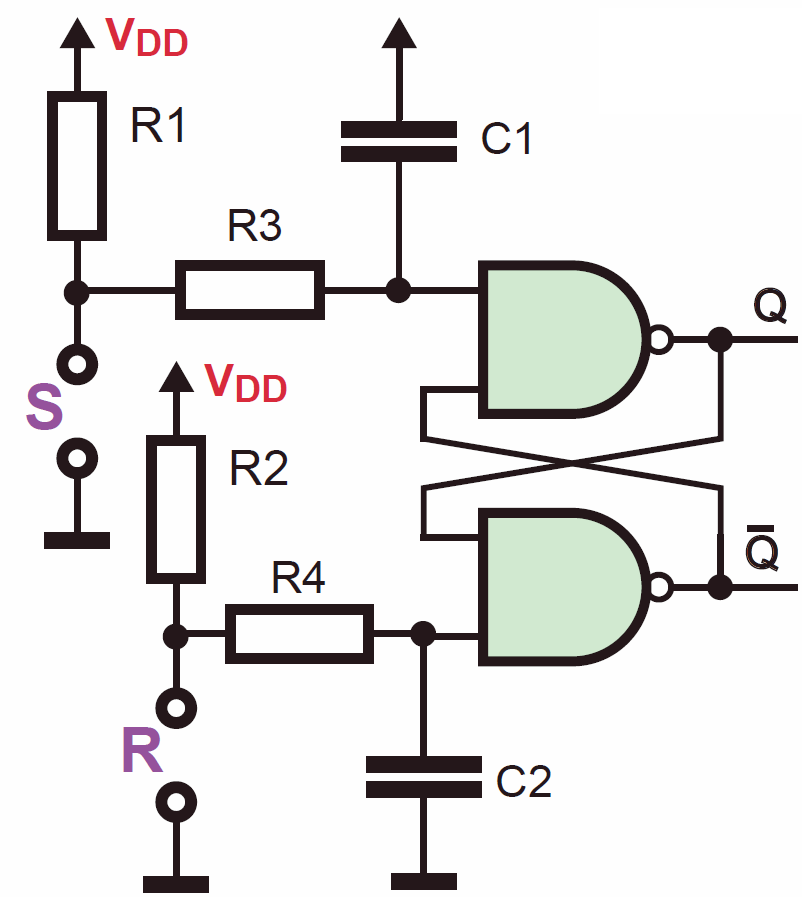
Mniej oczywisty przykład znajdziesz na rysunku 9a. Tu mamy czujniki jednoelektrodowe, wykorzystujące maleńkie prądy zmienne 50 Hz, płynące przez wszechobecne pojemności (szczegóły w wykładzie 7). Przy dotknięciu palcem punktu X, w puntach X, A, B pojawia się przebieg zmienny 50 Hz. Obwód przyłączony do punktu B składający się z diody, rezystora i kondensatora zapewnia na wyjściu zmianę stanu logicznego na czas dotykania czujnika X.
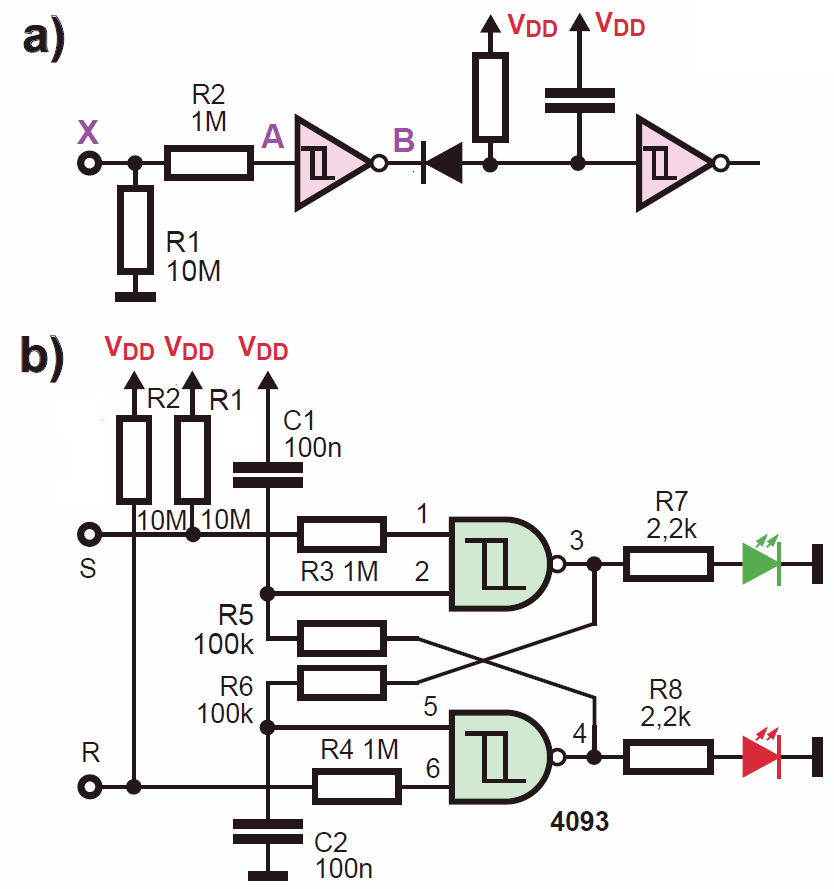
Rysunek 9
Mój model przełącznika „pojemnościowego” z przerzutnikiem RS według rysunku 9b pokazany jest na fotografii 10.
Fotografia 10
„Wewnętrzne” obwody R5C1 i R6C2 zapewniają zerowanie po włączeniu zasilania. Układ będzie zawsze działał przy dołączeniu punktów R, S do masy (czujniki dotykowe rezystancje). Natomiast czujniki pojemnościowe (dotknięcie palcem tylko punktów R albo S) będą prawidłowo działać tylko wtedy, gdy układ dla przebiegów zmiennych będzie połączony z ziemią, bezpośrednio lub przez znaczące pojemności. U mnie „czujniki pojemnościowe” nie działały przy zasilaniu z baterii, a przy zasilaniu z klasycznego zasilacza działały tylko przy jednej pozycji wtyczki w gniazdku. Masz okazję, żeby sprawdzić te kwestie osobiście.
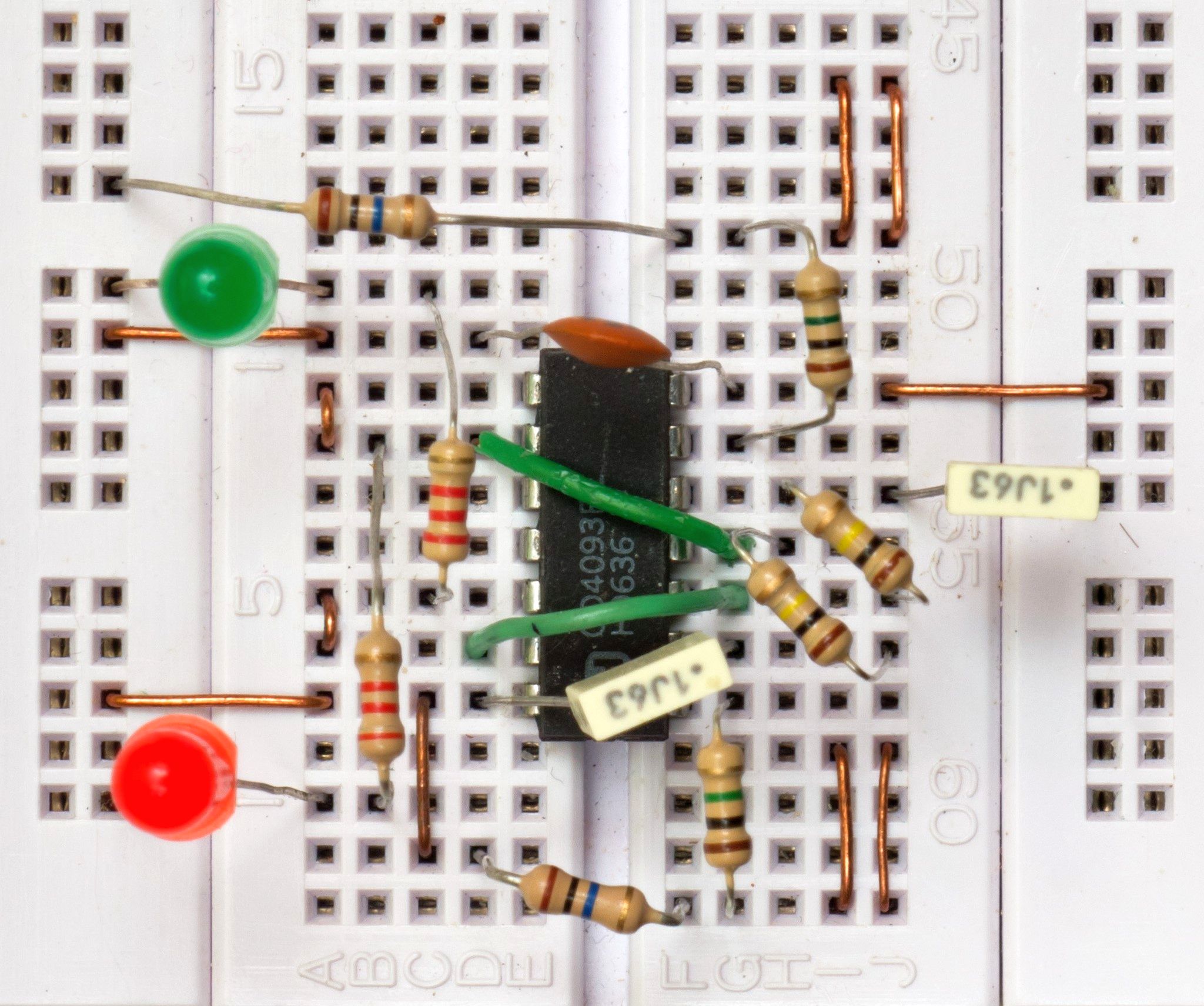
Ogromna rezystancja wejścia tranzystorów MOSFET umożliwia też realizację pamięci, gdzie elementem pamięciowym jest kondensator. Możemy zrealizować prostą trzybitową pamięć według rysunku 11. Dotykając jednego z punktów A, B, C oraz masy lub plusa zasilania albo ładujemy dany kondensator albo go rozładowujemy.
Rysunek 11
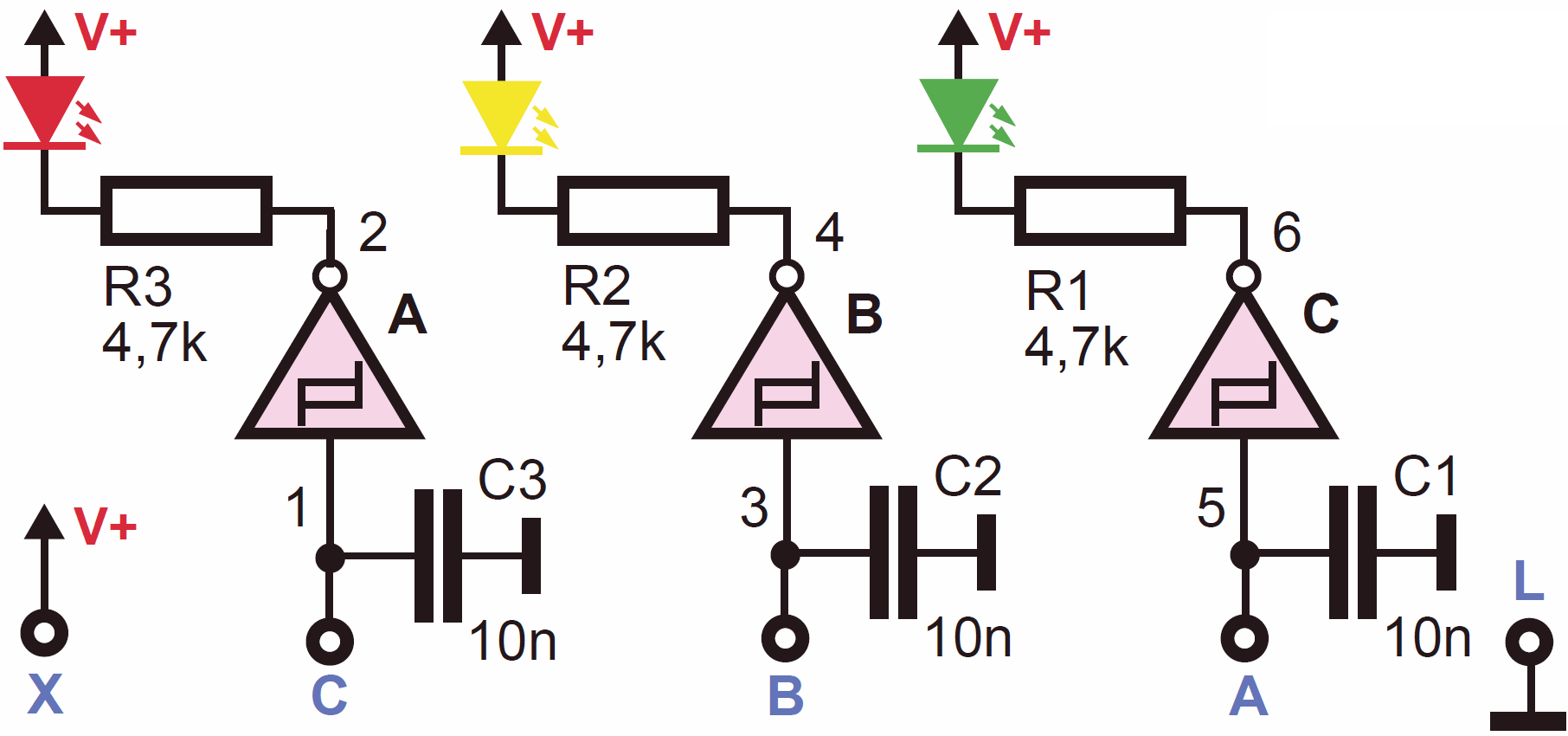
Później kondensator pozostaje niepodłączony i praktycznie nie ładuje się i nie rozładowuje. Układ będzie też działał bez kondensatorów C1…C3, wykorzystując maleńką wewnętrzną pojemność bramek CMOS (około 10 pF). Na takiej zasadzie działają pamięci nieulotne Flash i EEPROM – rysunek 3. A teraz według rysunku 12 dodajmy do naszego trzybitowego przełącznika sieć rezystorów zwaną R-2R.
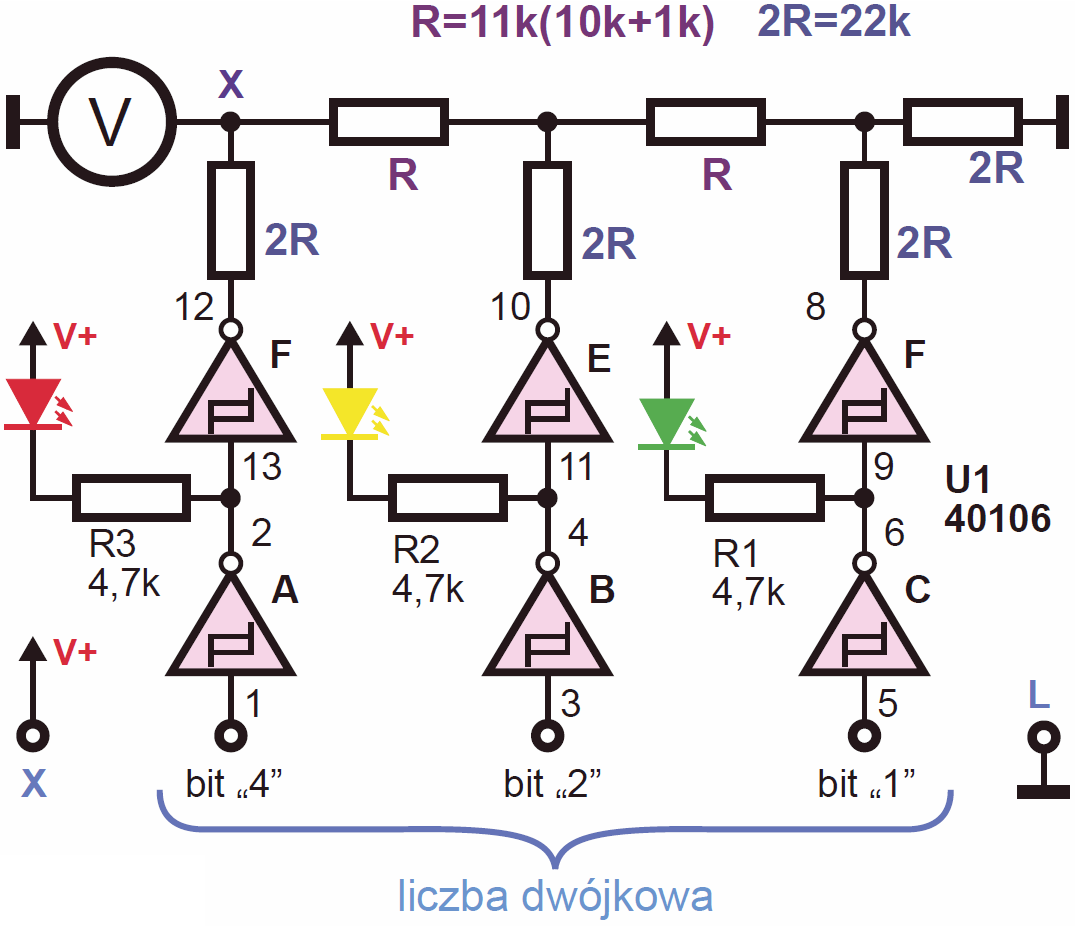
Rysunek 12
W roli rezystorów 2R wykorzystajmy 22 kΩ, a w roli R – 11 kΩ, złożony z rezystorów 10 kΩ + 1 kΩ. I oto w zaskakująco prosty sposób zbudowaliśmy (trzybitowy) przetwornik cyfrowo-analogowy C/A, zwany też D/A lub DAC, który niejako zamienia wartość liczby dwójkowej na napięcie. Gdy wszystkie bity o wagach 4 (dioda czerwona), 2 (dioda żółta), 1 (dioda zielona) mają stan 0 czyli niski, wtedy na wyjściu X napięcie jest równe zeru. Gdy tylko bit oznaczony 1 jest w stanie wysokim (świeci tylko dioda zielona), na wyjściu X pojawi się napięcie równe 1/8 napięcia zasilania. Gdy wszystkie bity 4, 2, 1 będą mieć stan wysoki, na wyjściu wystąpi napięcie równe 7/8 napięcia zasilania. Zawsze napięcie wyjściowe będzie równe N/8×Uzas, gdzie N to liczba dwójkowa. Mój trzybitowy przetwornik C/A pokazany jest na fotografii 13.
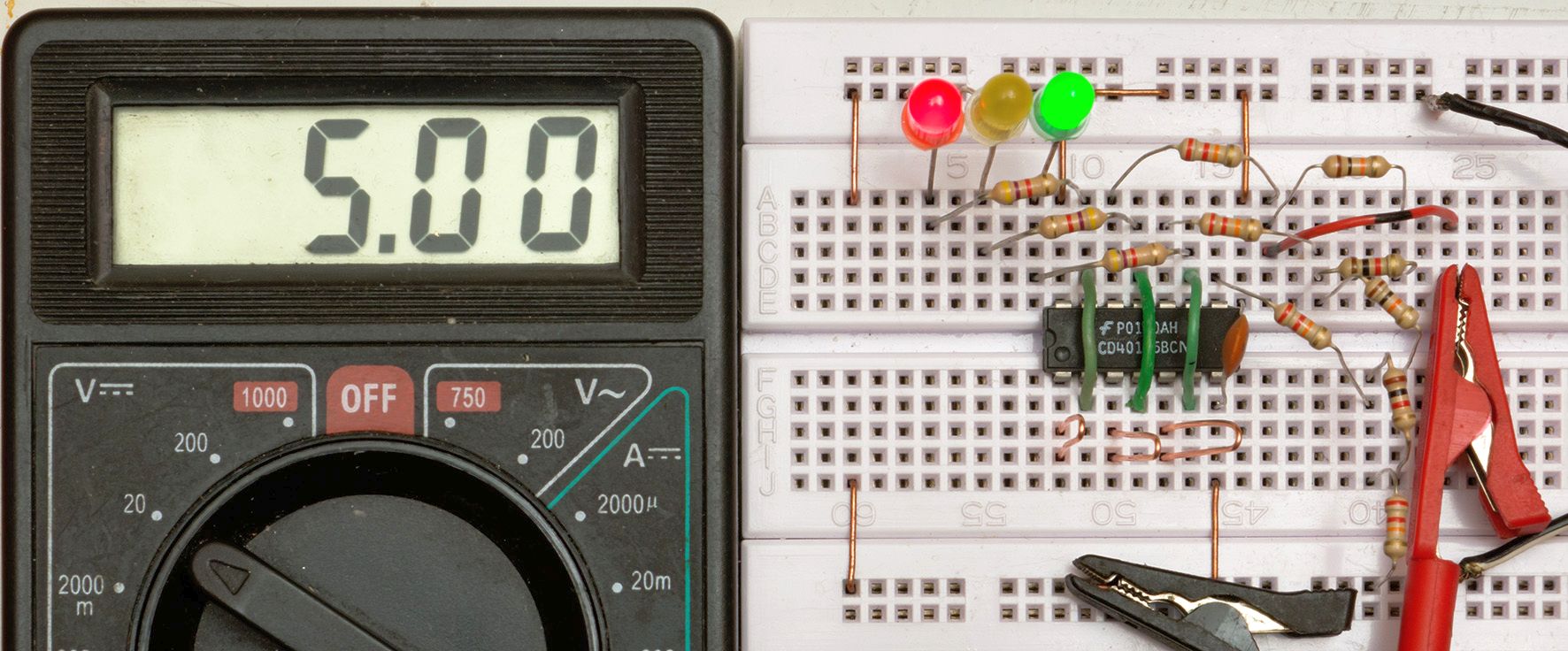
Fotografia 13
W ten sposób można budować szybkie przetworniki cyfrowo-analogowe (C/A) o większej liczbie bitów, trzeba tylko zastosować rezystory R-2R o odpowiednio dużej precyzji.
Moglibyśmy do wyjścia X takiego przetwornika cyfrowo-analogowego dołączyć wejście generatora VCO z rysunku 24 poprzedniego wykładu – uzyskalibyśmy rodzaj instrumentu muzycznego – prymitywnej pozytywki.
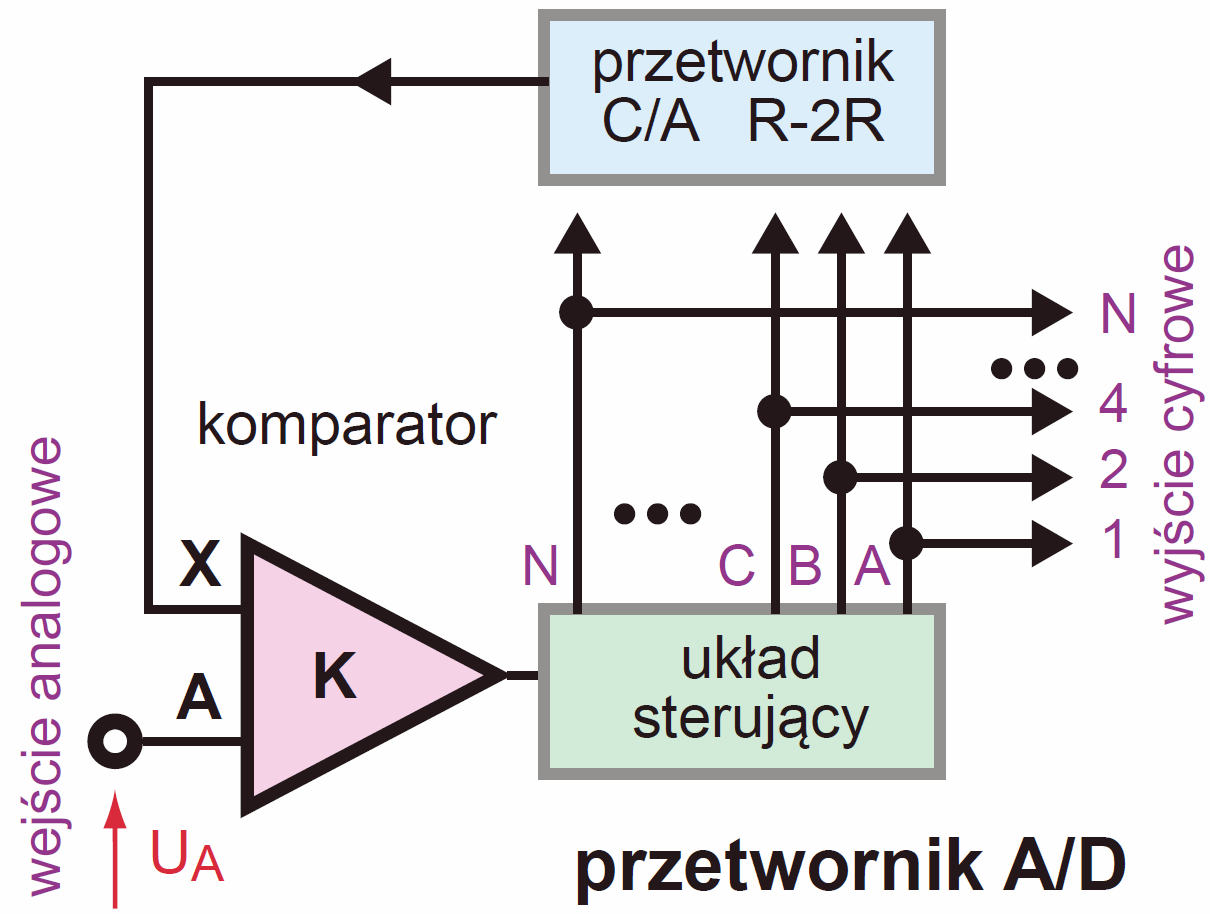
Przetworniki cyfrowo-analogowe z drabinką R-2R są oczywiście wielokrotnie szybsze od wspomnianych w poprzednim wykładzie (rysunek 19) przetworników PWM, które muszą mieć na wyjściu filtr uśredniający RC. Szybkie przetworniki R-2R można też wykorzystać w działających „w drugą stronę” przetwornikach analogowo-cyfrowych (A/C, zwane też A/D lub ADC). Otóż wystarczy do przetwornika C/A dodać komparator oraz układ sterujący, by zbudować przetwornik A/C według idei z rysunku 14.
Rysunek 14
W najprostszym przypadku sercem układu sterującego może być zwyczajny licznik dwójkowy – wtedy w miarę pracy licznika napięcie w punkcie X będzie rosnąć i gdy przekroczy wartość napięcia mierzonego UA, licznik zostanie zatrzymany i jego stan liczbowy będzie odpowiadał napięciu UA. W praktyce zamiast licznika dwójkowego, stosuje się specyficzny rejestr (aproksymujący, zwany SAR -Succesive Approximation Register), co pozwala znakomicie skrócić proces przetwarzania do kilku… kilkunastu taktów zegara. Rejestr SAR jest tak pomyślany, żeby jego cyfrowa zawartość zmieniała się w kolejnych krokach/taktach zależnie od wyniku wcześniejszych porównań tak, żeby ustalenie zawartości przebiegało jak najszybciej. Przetworniki A/C o takiej zasadzie działania z rejestrem SAR są wbudowane w wiele mikrokontrolerów jednoukładowych i zwykle mają na wejściu dodatkowy analogowy multiplekser, przez co jeden przetwornik może mierzyć sygnały analogowe z kilku wejść.
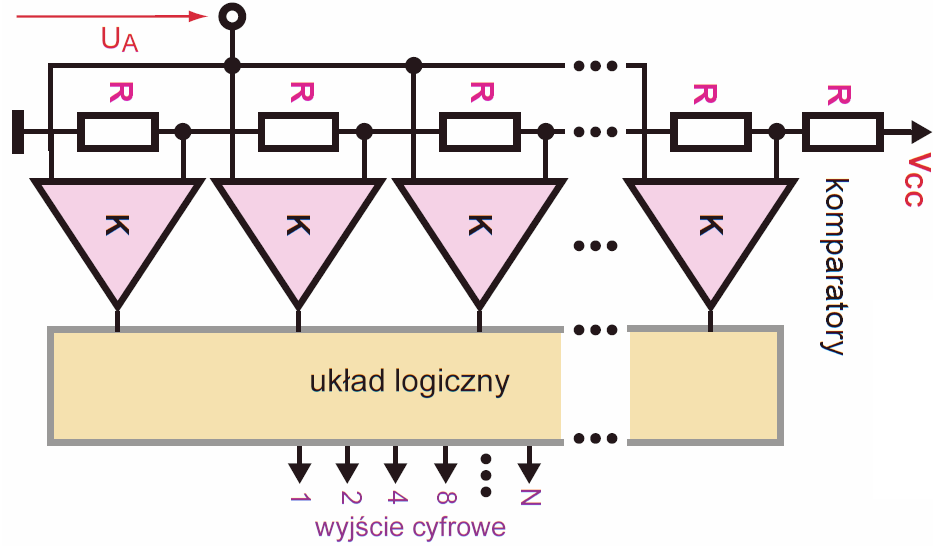
Gdy potrzebna jest naprawdę duża szybkość przetwarzania, np. sygnałów wideo, wykorzystuje się bardzo szybkie przetworniki z bezpośrednim przetwarzaniem, zwane Flash ADC, zawierające dzielnik napięcia w postaci łańcucha jednakowych rezystorów oraz komparatorów według idei z rysunku 15. Zaletą jest duża szybkość, a wadą jest stopień skomplikowania: 4-bitowy przetwornik Flash ADC ma 16 rezystorów i 15 komparatorów (plus układ logiczny dekodujący stany wyjść komparatorów na liczbę dwójkową), natomiast 12-bitowy przetwornik tego typu musiałby mieć 4095 komparatorów i jednakowych rezystorów o bardzo wąskiej tolerancji (względnej).
Rysunek 15
Dostępne są też znacznie powolniejsze, ale dokładniejsze i tańsze przetworniki A/C. Od kilkudziesięciu lat dostępne, i nadal wykorzystywane w najtańszych multimetrach przetworniki A/C, a właściwie kompletne scalone woltomierze ICL7106 do współpracy z wyświetlaczem LCD (oraz ICL7107 do wyświetlaczy LED). Przeprowadzane jest w nich dwukrotnie całkowanie, czyli kontrolowane ładowanie i rozładowanie kondensatora, raz przy wykorzystaniu napięcia mierzonego, drugi raz napięcia wzorcowego (odniesienia), a pomiar w sumie polega na zliczaniu czasu, który odpowiada wielkości mierzonego napięcia.
Ponieważ sposobami cyfrowymi można łatwo zmierzyć częstotliwość i czas, w roli przetworników analogowo-cyfrowych wykorzystywane są też przetworniki napięcie-częstotliwość (U/f) i napięcie-czas (U/T). Nie będziemy jednak zagłębiać się w dalsze szczegóły.
Zrealizujmy natomiast kilka kolejnych interesujących układów. Rysunek 16, fotografia 17 pokazują prosty przerzutnik toggle (załącz/wyłącz) z jednym przyciskiem. Stała czasowa R2C1 określa maksymalną częstotliwość przełączania i maksymalny czas naciskania przycisku (przy ciągłym naciśnięciu przycisku układ staje się generatorem).
Rysunek 16
Fotografia 17
A teraz układy znacznie ambitniejsze.
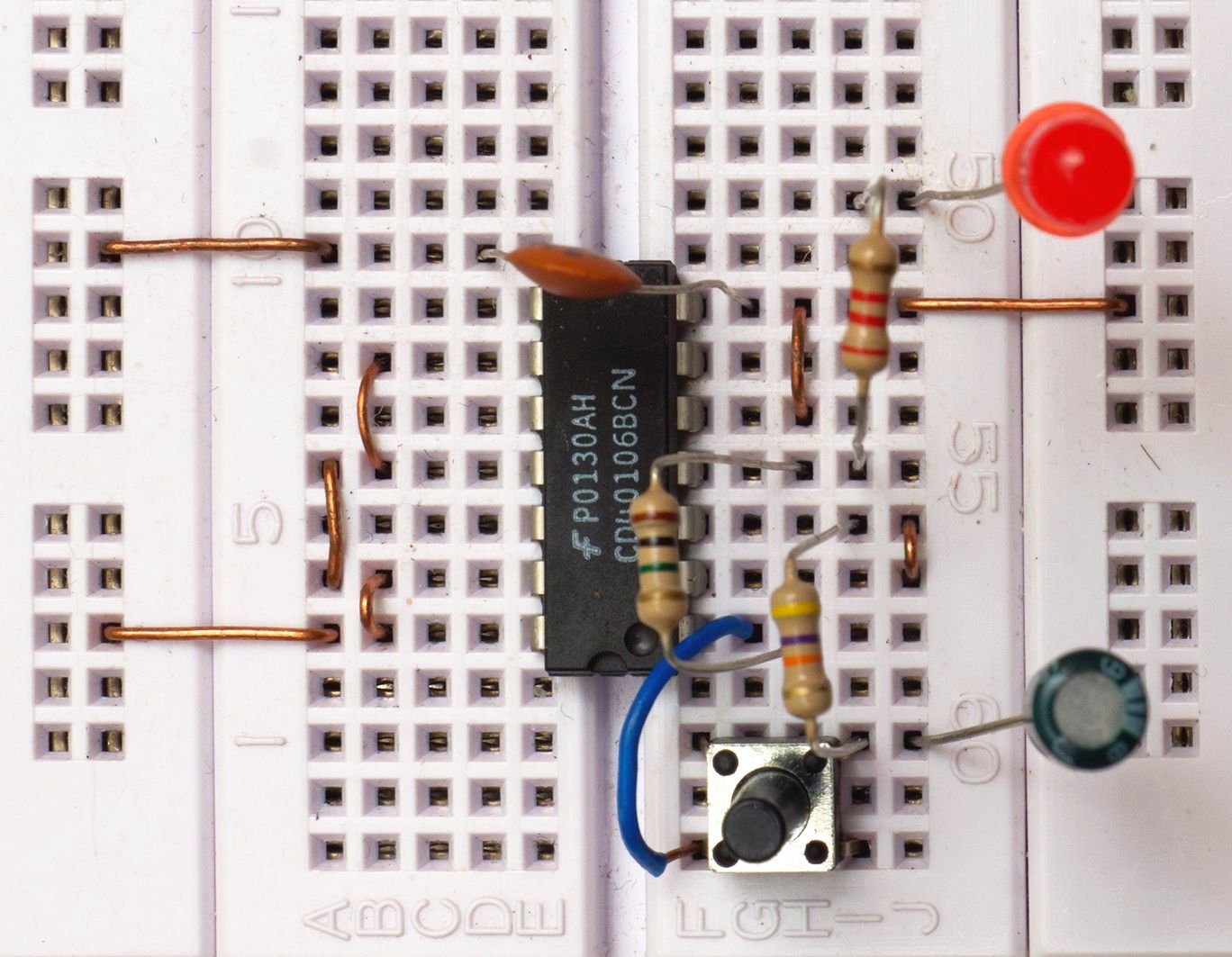
Według rysunku 18 i fotografii 19 możesz zrealizować cyfrowy miernik pojemności. Zawiera on licznik U2 z dziesięcioma diodami LED. Zlicza on impulsy podawane na wejście CL z generatora na bramkach U1D, U1A. Jest zerowany krótkimi impulsami, podawanymi na wejscie zerujące MR.
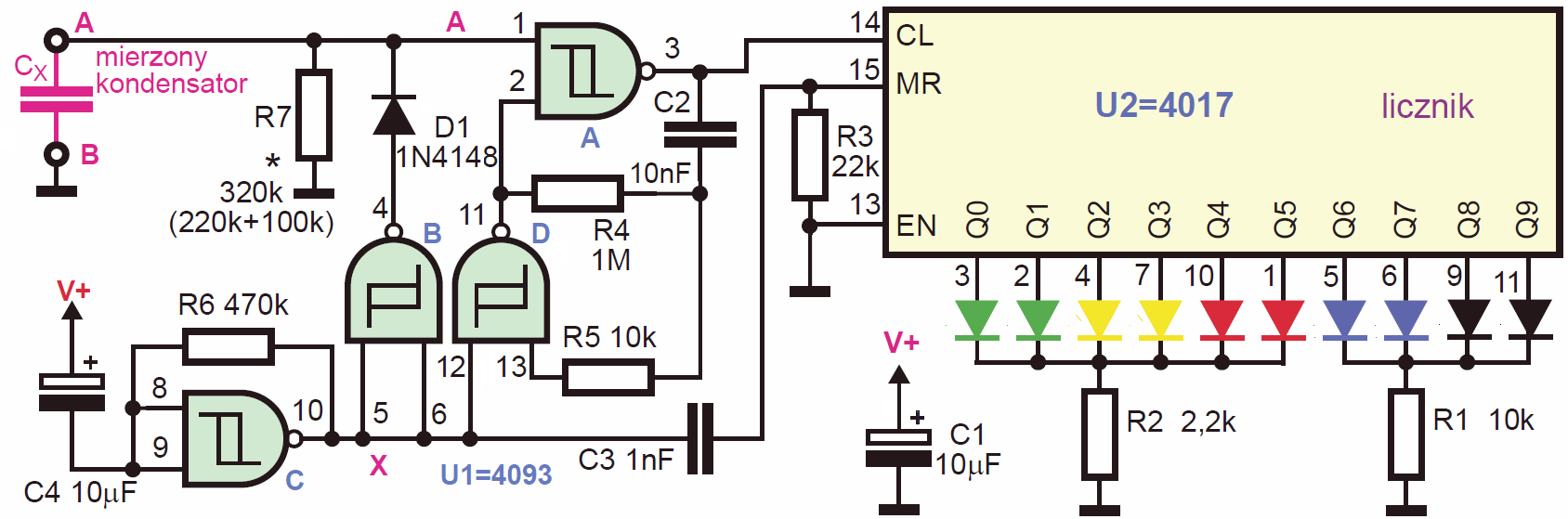
Rysunek 18
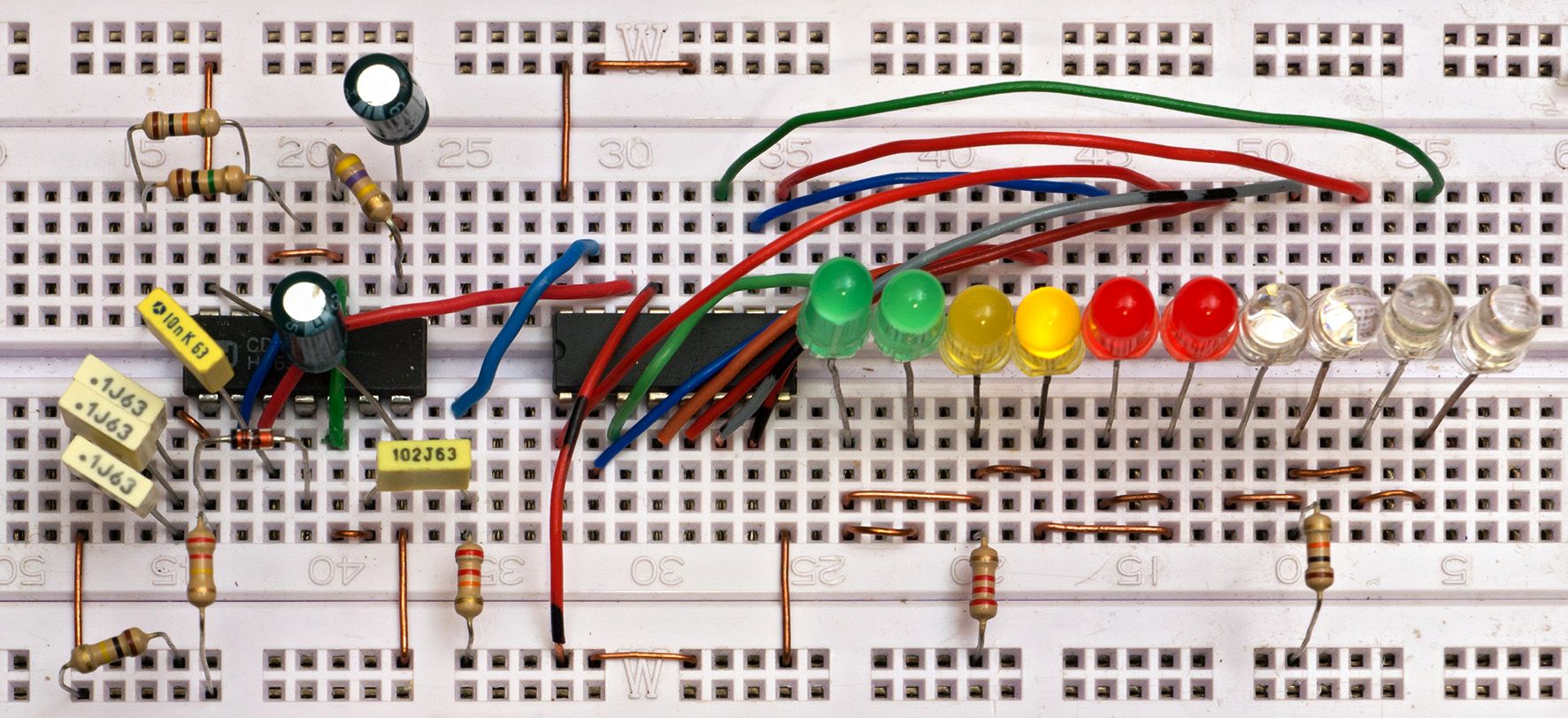
Fotografia 19
Pracą miernika pojemności steruje generator U1C, R6, C4. Gdy w puncie X panuje stan niski – potencjał masy, wtedy generator U1D, U1A nie pracuje. Na wyjściu bramki U1B panuje stan wysoki, więc dzięki diodzie D1 w punkcie A panuje napięcie bliskie dodatniemu napięciu zasilania (pomniejszone o około 0,7 V – spadek napięcia na D1). Mierzony kondensator Cx jest naładowany. Gdy w punkcie X pojawia się stan wysoki, zaczyna się cykl pracy miernika. Przede wszystkim dodatnie, rosnące zbocze w punkcie X powoduje wytworzenie przez obwód różniczkujący R3C3 króciutkiego dodatniego impulsu, który zeruje licznik. Jednocześnie stan wysoki w punkcie X i stan wysoki w punkcie A – ze względu na to, że kondensator Cx jest naładowany powodują, że zaczyna pracować generator U1D, U1A. Licznik U2 zlicza jego impulsy.
Na wyjściu bramki U1B występuje wtedy stan niski, a to oznacza, że naładowany wcześniej mierzony kondensator Cx zaczyna się rozładowywać przez rezystor R7. Napięcie w punkcie A i na nóżce 1 U1A maleje. Licznik U1D, U1A przestanie zliczać, gdy napięcie to zmniejszy się poniżej napięcia progowego bramki U1A. Wtedy generator przestanie pracować i stan licznika zatrzyma się. Gdy znów w punkcie X pojawi się stan niski, sytuacja pozostanie niezmieniona – licznik będzie wciąż pokazywał, ile zliczył impulsów. Dopiero gdy w punkcie X pojawi się stan wysoki, licznik zostanie wyzerowany i cykl pomiarowy zacznie się od nowa. Dzięki temu, że okres pracy generatora U1C wynosi kilka sekund, a generator U1D, U1A ma częstotliwość wielokrotnie większą, podczas pomiaru obserwujemy tylko krótkie mignięcia diod. A przez większość czasu miernik wyświetla wynik ostatniego pomiaru.
Dodając do układu komparator analogowy można byłoby zbudować inne przyrządy. Rysunek 20 pokazuje nieco uproszczony schemat… cyfrowego woltomierza. Licznik U2 zlicza impulsy z generatora, gdy stan wysoki występuje zarówno w punkcie X, jak i w punkcie A. Także i tu pracą układu steruje generator na bramce U1C. Gdy na wyjściu tego generatora, w punkcie Y panuje stan wysoki, a w punkcie X panuje stan niski, wtedy generator U1D, U1A nie pracuje. W punkcie Y panuje stan wysoki, więc prąd płynie przez R7, tranzystor T1 jest nasycony i napięcie na kondensatorze C5, w punkcie Z jest praktycznie równe zeru. Układ ten ma zmierzyć napięcie w punkcie V. Załóżmy, że na punkt V podaliśmy z zewnątrz jakieś niewielkie napięcie, np. +1 V (oczywiście mierzone względem masy). W punkcie Z napięcie jest równe zeru, a w punkcie V +1 V, więc na wyjściu komparatora, w punkcie A panuje stan wysoki. Jednak generator nie pracuje, bo w punkcie X panuje stan niski.
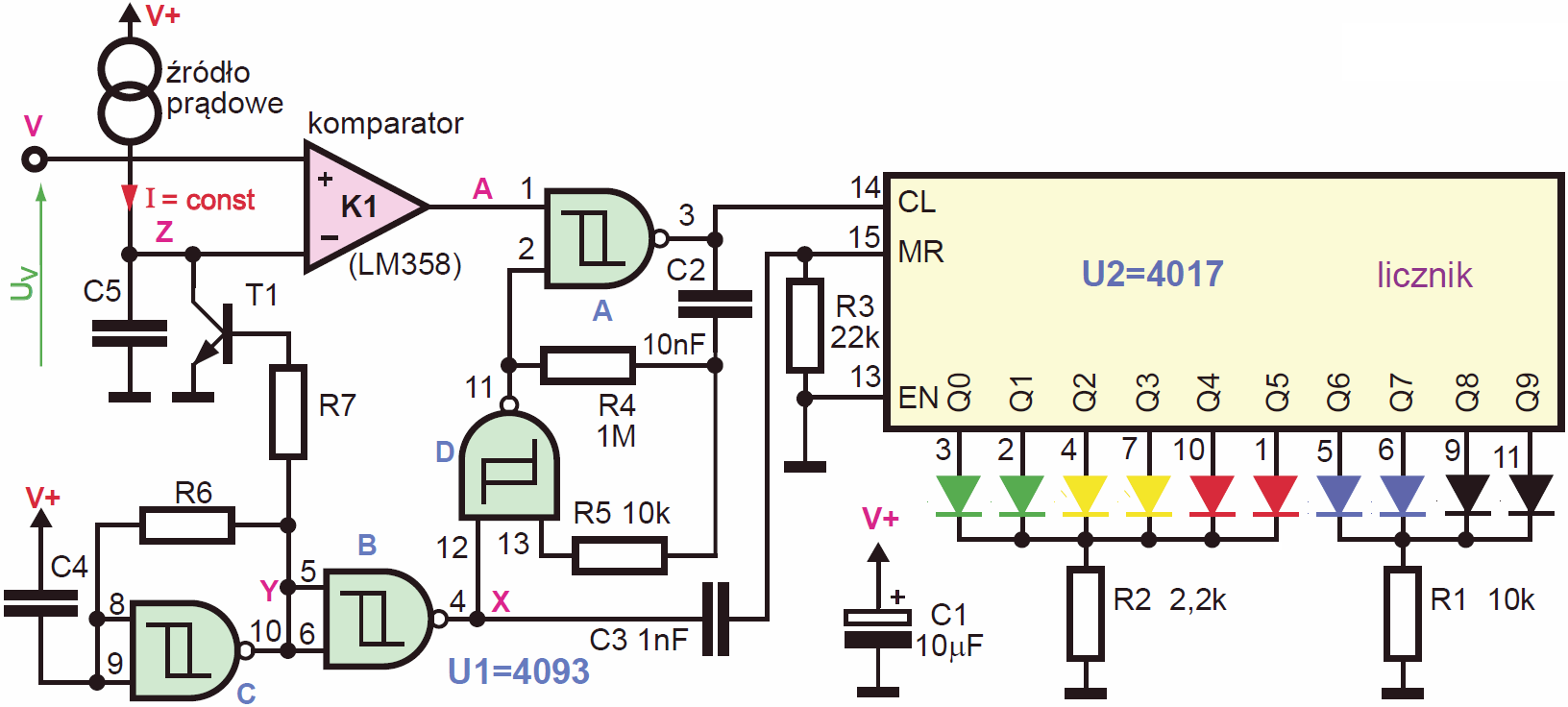
Rysunek 20
Gdy w punkcie Y pojawi się stan niski, a w punkcie X – wysoki, wtedy zaczyna pracować generator U1D, U1A, obwód R3C3 wytwarza króciutki impuls zerujący licznik U2 i ten zaczyna zliczać jego impulsy począwszy od zera. Jednocześnie zostaje zatkany tranzystor T1. Kondensator C5 zaczyna się dość szybko ładować niezmiennym prądem źródła prądowego, więc napięcie w punkcie Z rośnie liniowo. Gdy napięcie to przekroczy +1 V, czyli stanie się większe, niż na wejściu V, wtedy stan komparatora zmieni się: na jego wyjściu, w punkcie A pojawi się stan niski, co zatrzyma licznik U1D, U1A. Licznik zatrzyma się i jedna z diod LED pokaże liczbę zliczonych impulsów. Czym wyższe napięcie mierzone UV, tym więcej czasu upłynie do zrównania napięć w punktach Z, V i licznik zliczy więcej impulsów. Stan licznika jest wprost proporcjonalny do napięcia mierzonego UV – przy odpowiednim dobraniu pojemności, rezystancji i prądu źródła prądowego układ istotnie będzie (bardzo prostym) woltomierzem.
Inna modyfikacja daje miernik pojemności akumulatorów. Pomiar pojemności akumulatora jest czynnością jednorazową: bierzemy w pełni naładowany akumulator, obciążamy go niezmiennym prądem i mierzymy czas, po którym napięcie akumulatora zmniejszy się do wartości granicznej. Pomnożenie tego czasu przez prąd obciążenia daje pojemność akumulatora w amperogodzinach.
Przykładowy miernik pojemności akumulatorów można byłoby zbudować według rysunku 21. Znów podstawą miernika jest licznik U2 i generator U1D, U1A. Przypuśćmy, że ma to być miernik do kwasowo-ołowiowych akumulatorów 12-woltowych (wtedy napięcie zasilania miernika musiałoby wynosić co najmniej 15 V). Do kontroli napięcia akumulatora możemy wykorzystać komparator U3A (np. wzmacniacz operacyjny LM358). Na jego wejście nieodwracające („dodatnie”) podane jest napięcie rozładowywanego akumulatora, a na wejście odwracające („ujemne”) podane jest napięcie odniesienia, równe minimalnemu napięciu bezpiecznego rozładowania. Dla 12-woltowych akumulatorów kwasowych jest to zazwyczaj 10,5 V. Jeśli akumulator jest w pełni naładowany, jego napięcie jest wyższe i na wyjściu komparatora, w punkcie A, panuje stan wysoki. Umożliwia to prawidłową pracę generatora U1D, U1A a także właściwe działanie przerzutnika RS z bramkami U1B, U1C.

Rysunek 21
Ponieważ pomiar jest w tym wypadku czynnością jednorazową, zastosujemy przerzutnik RS, który na początku cyklu ustawimy naciskając przycisk START. Miernik zacznie pracę, gdy w punkcie X pojawi się stan wysoki. Znów obwód R3C3 wyzeruje licznik, który zacznie zliczać od zera. Co ważne, dopiero po pojawieniu się stanu wysokiego w punkcie X zacznie płynąć prąd przez rezystor R6 i na diodzie Zenera DZ (raczej na scalonym źródle napięcia odniesienia) wystąpi napięcie dodatnie (+1,25 V). Wzmacniacz operacyjny tak wysteruje tranzystor T1 (MOSFET N), by spadek napięcia na R8 miał taką samą wartość. Wzmacniacz operacyjny U3B z tranzystorem T1 tworzą źródło prądowe – akumulator rozładowywany jest niezmiennym prądem (IL = 1,25 V/R8). Wartość rezystora R8 i prądu należy dobrać stosownie do pojemności nominalnej akumulatora, na przykład liczbowo równą 1/5 pojemności nominalnej (wyrażanej w amperogodzinach).
Podczas rozładowania napięcie akumulatora będzie się pomalutku zmniejszać. Gdy spadnie poniżej 10,5 V, komparator U3A zmieni stan wyjścia – pojawi się tam stan niski, co po pierwsze zatrzyma licznik, a po drugie wyzeruje przerzutnik U1B, U1C, przez co w punkcie X pojawi się stan niski. Jednocześnie odezwie się brzęczyk piezo Y1, sygnalizując koniec pomiaru.
Oczywiście takie mierniki byłyby niedokładne. Zamiast pojedynczego licznika U2 należałoby zastosować licznik o większej pojemności, na przykład łącząc kilka kostek 4017 według rysunku 22, by zliczać jednostki, dziesiątki, setki, itd. Należałoby także zadbać o dokładność, stabilizując napięcie zasilania i stosując wysokiej jakości kondensatory i rezystory, żeby zminimalizować problem zmian temperatury i starzenia. Są to obszerne i niełatwe zagadnienia, w które w naszym kursie podstaw elektroniki wgłębiać się nie będziemy.
Rysunek 22
Kurs PKE dobiegł końca. W 24 wykładach pokazałem Ci zarys współczesnej elektroniki.
Piotr Górecki